基于6σ稳健性方法的汽车行驶平顺性优化
2012-11-30莫旭辉赵宇航钟志华张义
莫旭辉,赵宇航,钟志华,张义
(湖南大学 汽车车身先进制造国家重点实验室,湖南 长沙,410082)
汽车的平顺性主要是保证汽车在行驶过程中产生的振动和冲击环境对乘员舒适性的影响在一定界限之内[1]。在汽车各主要组成部分中,悬架是影响汽车行驶平顺性最重要的因素,因此,悬架参数的设计及优化在整车研发中至关重要。近年来,为改善汽车行驶平顺性,国内外学者做了大量的研究。赵旗等[2]建立了两自由度汽车行驶平顺性优化仿真模型,并运用遗传算法对该模型进行了求解。Uys等[3]分析了某款越野车在不同路面上以不同速度行驶时的平顺性,并通过改变悬架参数,优化其行驶平顺性。然而,传统的优化设计没有考虑设计参数波动的影响,如悬架刚度和阻尼等的不确定性,这些设计变量的波动可能导致确定性优化结果失效。鉴于此,本研究建立整车 11自由度平顺性模型,结合蒙特卡罗技术及6σ稳健优化设计方法,对整车行驶平顺性进行稳健性优化,分析设计变量波动对优化结果的影响,通过对比结果,分析确定性优化与稳健性优化的优劣,并验证稳健性优化设计方法在汽车平顺性优化领域的工程实用性。
1 路面模型
我国的路面以B级和C级路面为主,考虑到研究对象的实际使用情况,选择B级路面作为输入。这里采用白噪声滤波法构建路面信号[4],其路面不平度表示如下:

式中:xi(t)为第i个车轮所受的路面不平度随机激励;f0为下截止频率,f0=0.01 m−1;n0为参考空间频率,n0=0.1 m−1;v为车速,v=20 m/s;Gq(n0)为路面不平度系数,在 B 级路面中,取 Gq(n0)=64×10−6m2/m−1;ω(t)为均值为0的白噪声信号。
在 Matlab/Simulink环境中进行路面不平度的模拟,得到B级路面激励时域仿真输出结果如图1所示。图2所示为B级仿真路面与标准路面的功率谱密度,结果显示:两者的功率谱密度曲线重合度很高,所以,该B级仿真路面可以代替真实路面应用于仿真研究。
2 整车11自由度平顺性仿真
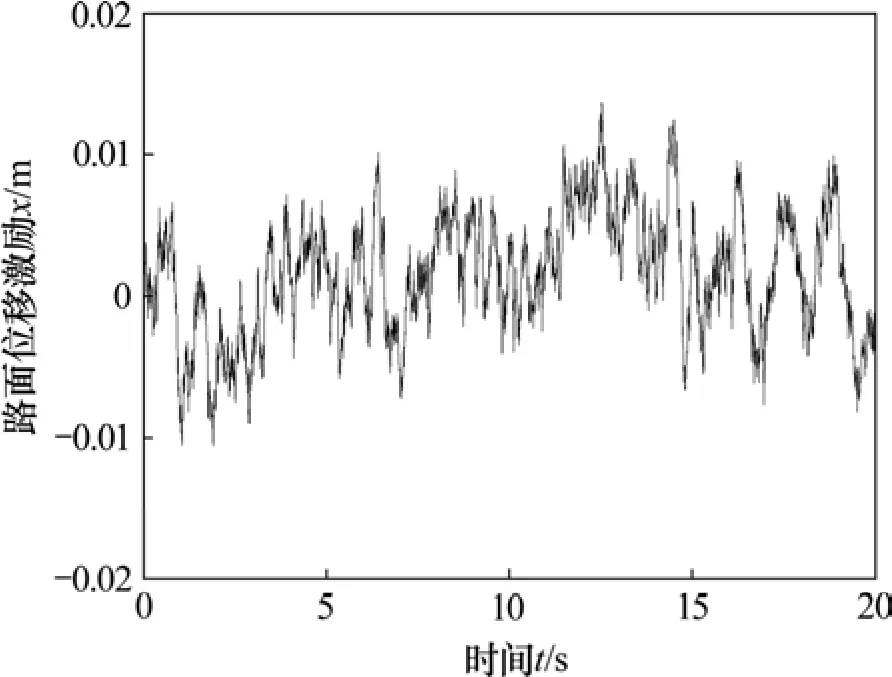
图1 B级路面时域模型Fig.1 B grade road in time domain
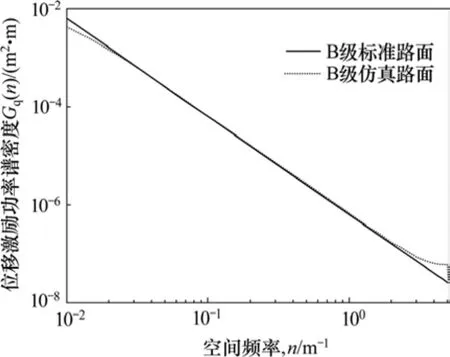
图2 B级仿真路面与标准路面功率谱密度Fig.2 Power spectral density of B grade simulation road and standard road
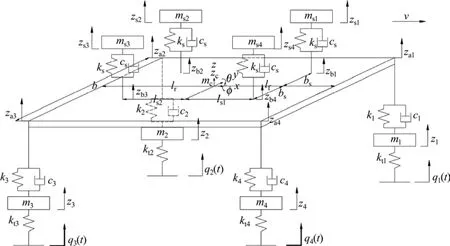
图3 11自由度整车动力学模型Fig.3 Vehicle dynamics model with 11 DOFs
经过合理简化,构建整车的11自由度整车动力学模型如图3所示。所构建模型中,车身被视为刚体,有垂直振动、侧倾转动和俯仰转动3个自由度,4个座椅和4个非簧载质量分别具有1个垂直振动自由度。整车坐标系以车身质心为原点O,以过原点向前的整车纵向对称线为 X轴,以过原点垂直向上为 Z轴,Y=X×Z为右手坐标系。模型中各符号所代表的参数如表1所示。
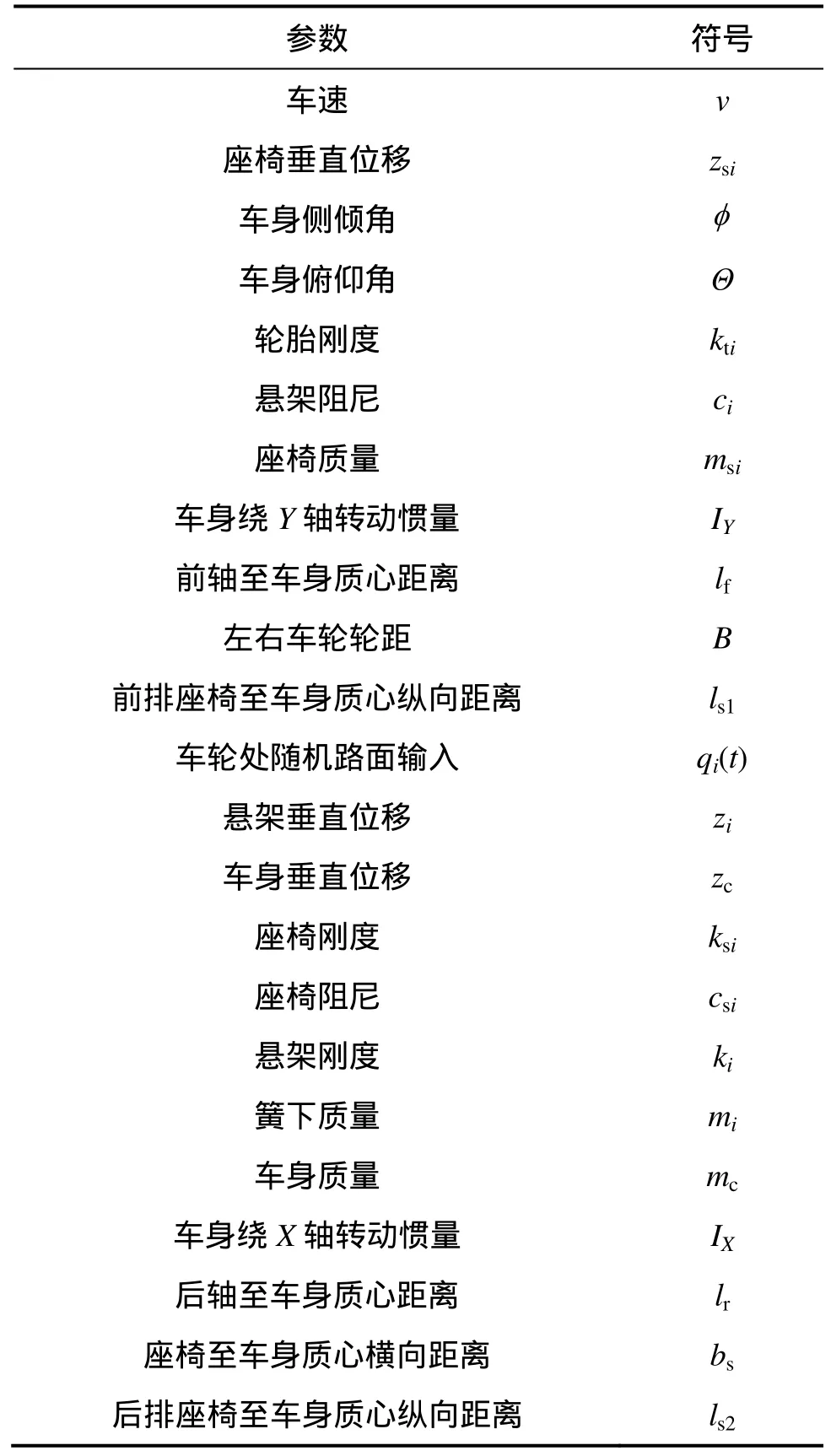
表1 模型中的符号及代表的参数Table 1 Symbols and representatives in model
模型中各符号下标中出现的记号i=1,2,3,4,其代表的含义是:对于悬架和轮胎分别对应于左前、左后、右后和右前的位置;对于座椅则对应于驾驶员、左后乘客、右后乘客和副驾驶的位置。

基于牛顿定律可以建立 11自由度汽车平顺性分析模型振动微分方程:式中:M为11×11阶的质量矩阵;C为11×11阶的阻尼矩阵;K为11×11阶的刚度矩阵;Kt为11×1阶的激励矩阵,Z,分别为11×1阶的位移、速度和加速度向量;Q为11×1阶的激励向量。
对于某款在研轿车,其有关参数如下:mc=1 200 kg;Ir=340 kg·m2;Ip=2230 kg·m2;m1=m4=40.5 kg;m2=m3=45.4 kg;ms=60 kg;kt1= kt2= kt3= kt4=190 kN/m;ks1=ks2=ks3=ks4=7 500 N/m;cs1=cs2=cs3=cs4=150 N·s/m;k1=k4=22 kN/m;k2=k3=24 kN/m;c1=c2=c3=c4=1 120 N·s/m;bl=br=0.74 m;lr=1.51 m;lf=1.25 m;ls=0.33 m;bs=0.54 m;v=20 m/s。
左前轮路面输入采用式(1)中的路面模型。车辆在行驶时,同侧前后车轮路面激励相同,只是后轮比前轮滞后一段时间t0=(lr+lf)/v。由于车辆左右车轮所受路面激励不同,考虑到路面的随机性,右前轮和右后轮同样采用式(1)中模型,但右前轮的路面激励滞后任意时间t1(t1≠t0),右后轮滞后时间为t0+t1。
对11自由度整车动力学方程求解,得到各座椅垂向加速度均方根值,计算结果如表2所示。

表2 各座椅垂向加速度均方根值及加权振级Table 2 RMS values and weighted vibration levels of seats’vertical acceleration
根据文献[5]中提到的加权振级和加权加速度与人的主观感觉之间的关系,对于所研究的轿车,驾驶员和副驾驶感觉有一些不舒适,后排座椅的乘客感觉相当不舒适。
3 整车平顺性优化
3.1 构建优化设计变量与约束函数
在表1所示的各个参数之中,轮胎刚度一般都经过标准化,不易改变,而座椅的参数受到制造上的制约,可选择的余地不大,故选择悬架刚度和阻尼作为设计变量[6−7],而汽车的悬架一般是左右对称的,即k1=k4,k2=k3,c1=c4,c2=c3。
对于所研究的车型,前悬架偏频范围为1.00~1.45 Hz,后悬架偏频范围为1.17~1.58 Hz。根据文献[8],结合已知参数,可以计算出悬架参数的取值范围。
然而,考虑到制造和加工工艺,悬架的弹簧刚度和减振器阻尼容易受到制造过程和批量的影响,而它们的波动对整车的行驶平顺性能有重要影响。由厂方提供的数据可知:阻尼制造误差为±8%,悬架刚度的制造误差为±11.3%[9],设悬架刚度和阻尼均是服从以设计值为均值的正态分布的独立变量,对应的标准差分别下式计算得到:

其中:σ为均方差;ε为误差。最终确定优化变量如表3所示。
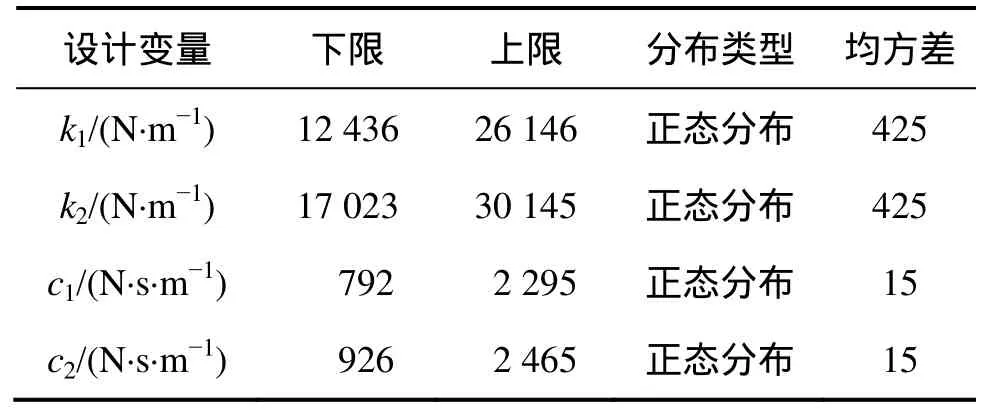
表3 设计变量Table 3 Design variables
为保证汽车正常行驶时,悬架的动挠度和车轮动载荷在适当的范围内变化,车轮相对动载Fd/G和悬架的动挠度fd应满足以下条件[8]:
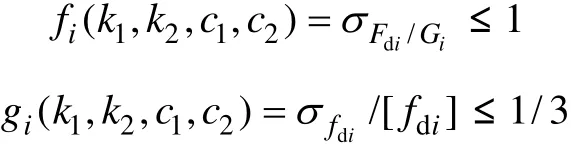
式中:[fdi]为第i个悬架允许的最大动挠度,这里都取70 mm。
3.2 整车平顺性的确定性优化
为保证汽车具有良好的行驶平顺性,对于11自由度汽车模型,以各个座椅垂向加速度均方根azi最小为优化目标。结合以上的优化变量和约束条件,构建确定性优化模型如下:

3.3 基于蒙特卡罗模拟方法的整车平顺性稳健性优化
稳健性是指在参数的不确定性影响下响应的稳定性。而稳健性优化则是在追寻目标函数最优解的同时,通过控制设计变量波动对优化目标的影响,达到降低目标函数在设计点上的敏感度及提高最优解的可靠性的目的。典型的稳健优化公式可以描述为[10]:
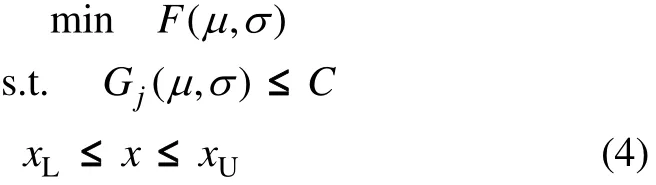
其中:C为约束值;x为设计变量;j为约束函数个数;xU和xL为设计变量的上、下限。
稳健性优化设计目标公式中的均值和方差可由蒙特卡罗模拟技术计算得到。进行蒙特卡罗计算,必须先对系统的仿真数值进行随机抽样[11],将抽样产生的随机变量代入目标函数得到响应的蒙特卡罗云图,并由蒙特卡罗云图计算得到目标响应的均值和方差。
在式(4)中,约束可以改为质量约束,表示如下[12]:

其中:μ和σ分别为目标值的平均值和均方差;n为σ约束的质量水平,通过改变n以改变优化质量。在优化时,设计者由具体情况确定n,从而实现不同σ水平的优化。6σ稳健性优化设计则是将n设定为6,使约束及目标响应的优化结果均满足6σ质量水平[13]。
工程设计中多目标稳健优化的数学模型为[14]:
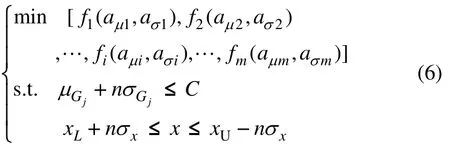
式中:C为约束值; fi( aμi,aσi)为第 i个产品质量特性的稳健表达式;m为产品质量特性的个数。
根据优化分量的要求,合理构造稳健表达式,以各个座椅垂向加速度均方根最小为优化目标,共有 4个优化目标,均是最小特性的目标分量[15]。所以,构建整车平顺性优化模型如下:
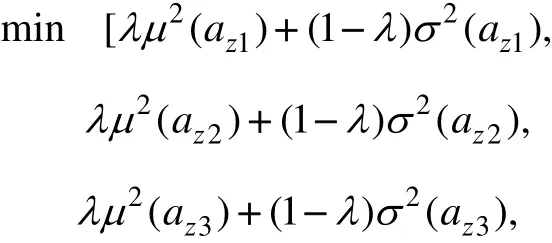
式中:λ为加权因子。
3.4 优化结果及分析
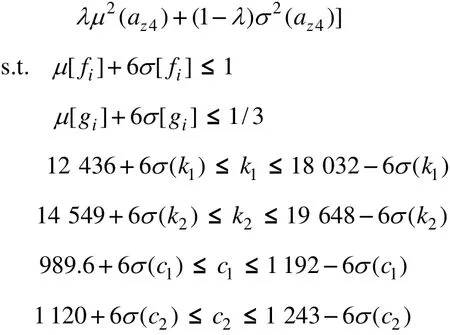
整车平顺性的确定性优化和稳健性优化的设计变量优化结果如表4所示,在确定性优化中,整车悬架阻尼增大,刚度下降,并趋于下限值。而在稳健性优化中,整车悬架刚度和阻尼的变化趋势虽与确定性优化的顺序一致,但变化幅度较小。
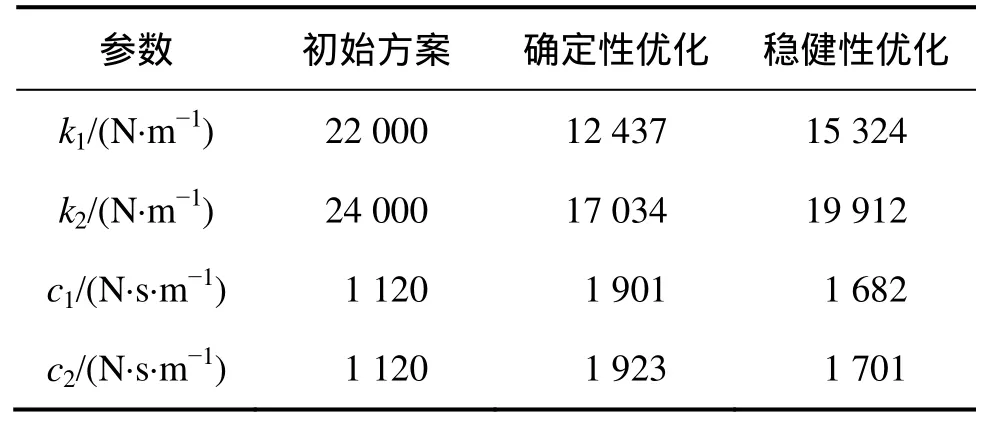
表4 设计变量优化结果Table 4 Optimization results of design variables
初始方案、确定性优化和稳健性优化的各座椅垂向加速度均方根如表5所示,由表5可知:优化后各座椅的垂向加速度都有不同程度降低。这里以驾驶员座椅和其对应侧的左前悬架与左前车轮为例进行分析。通过确定性优化,驾驶员座椅的垂向加速度均方根由0.403 6 m/s2降至0.293 7 m/s2,降低27.23%,均方差为0.035。而经过稳健性优化后,驾驶员座椅的垂向加速度均方根降至0.309 1 m/s2,降低23.41%,均方差为0.031。稳健优化在改善程度上虽然低于确定性优化的改善程度,但其优化结果的均方差较确定性优化减小11.43%,证明稳健优化结果更加稳定可靠。驾驶员座椅垂向加速度功率谱密度如图4所示,由图4可知:优化后,驾驶员的垂直加速度振动频率主要集中 1~3 Hz,避开了人体的敏感振动频率区域 4~12.5 Hz。

表5 各座椅垂向加速度均方根Table 5 RMS values of seats’ vertical acceleration
图4 驾驶员座椅垂向加速度功率谱密度Fig.4 Vertical acceleration power spectral density for driver seat
各轮胎相对动载均方根如表6所示。由表6可知:经确定性优化,左前轮相对动载均方根由0.665 6升高至0.902 5,其σ水平为2.01,而经稳健性优化,左前轮相对动载均方根值升高至0.706 9,σ水平为6.15,σ质量水平得到大幅度提高。确定性优化与稳健性优化约束质量概率密度分布如图5所示。确定性优化约束质量有部分超出边界,而稳健性优化约束质量远离边界,证明其优化结果优于确定性优化结果。左前轮相对动载功率谱密度如图6所示,由图6可知:优化后,左前轮相对动载有一定幅度的增加,接地性变差。

表6 各轮胎相对动载均方根Table 6 RMS values of tires’ relative dynamic load
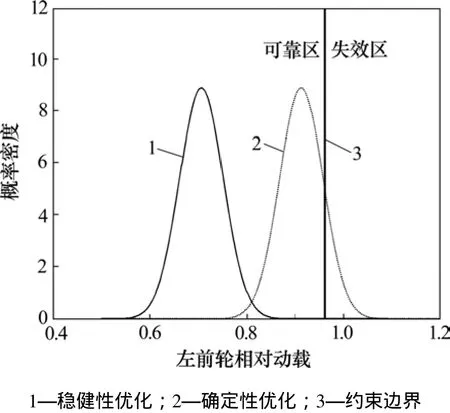
图5 确定性优化与稳健性优化约束质量概率密度分布Fig.5 Constraint quality probability density distribution of deterministic optimization and robustness optimization
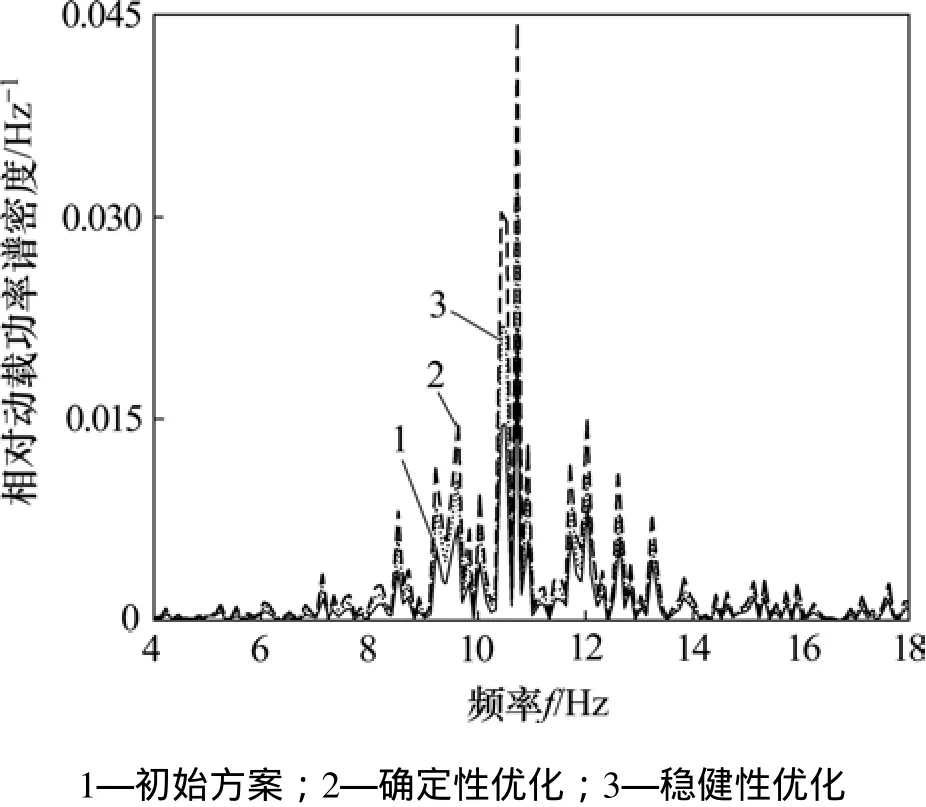
图6 左前轮相对动载功率谱密度Fig.6 Relative dynamic load power spectral density for left front tire
左前悬架动挠度功率谱密度如图7所示。由图7可知:经确定性优化和稳健优化后,悬架动挠度相比优化前在整个频域内均有所增加,但都在允许范围内变化。同时,其σ水平均大于等于8,证明其具有较高的可靠性。综合以上分析结果,经确定性优化和稳健性优化后的驾驶员座椅平顺性均得到提高,但相比于确定性优化,稳健性优化的结果具有更强的抗干扰能力。
优化后,其他座椅的相关参数与驾驶员座椅也有类似的变化趋势。
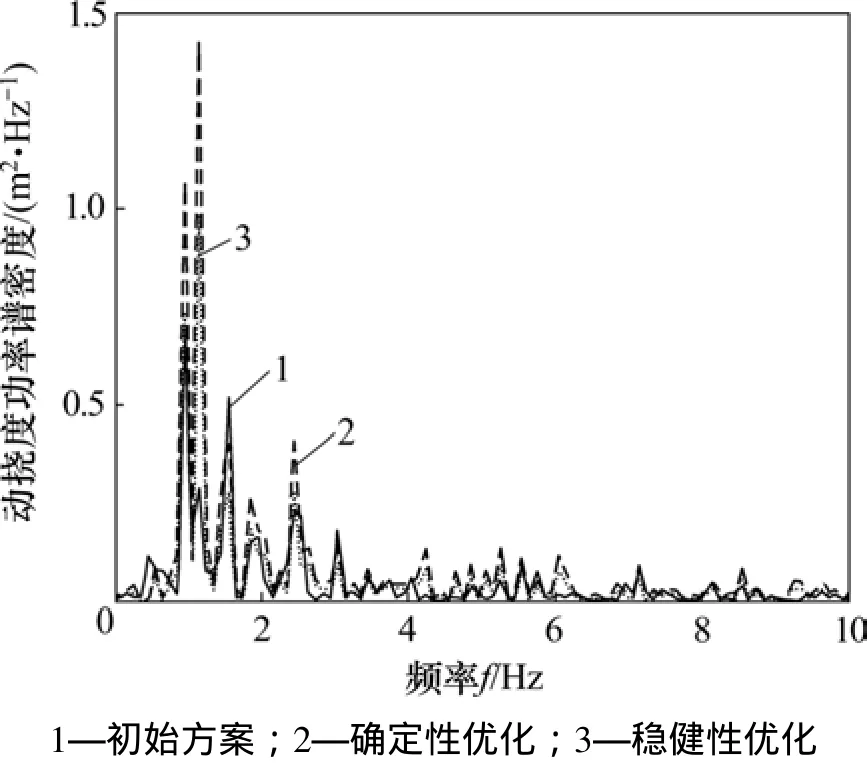
图7 左前悬架动挠度功率谱密度Fig.7 Dynamic displacement power spectral density for left front suspension
4 结论
(1)建立了11自由度整车模型,结合蒙特卡罗抽样技术和6σ稳健优化方法,在随机路面输入下,对其行驶平顺性进行了优化。
(2)通过稳健性优化,一方面,整车行驶平顺性得到显著改善,另一方面,降低了优化结果对优化参数波动的敏感性,即使设计变量在最优解附近发生波动,也能保证整车行驶的平顺性达到最优,即改善了优化目标的稳健性。
(3)稳健优化也大幅降低了因参数波动导致约束失效的概率,即提高了优化结果的可靠性。
(4)6σ稳健优化方法不仅为所研究的轿车确定了满足平顺性要求的悬架参数,为该轿车的设计与生产提供了理论依据,而且该方法也可以应用于悬架机构设计、汽车操纵稳定性优化及汽车平顺性和操纵稳定性的协同优化等多个方面,具有广阔的应用前景。
[1]余志生.汽车理论[M].5版.北京:机械工业出版社,2009:202−203.YU Zhi-sheng.Automobile theory[M].5th ed.Beiijng:China Machine Press,2009:202−203.
[2]赵旗,车华军,李杰.基于遗传算法的汽车行驶平顺性优化仿真[J].机械设计与制造,2009(3):203−205.ZHAO Qi,CHE Hua-jun,LI Jie.Automobile ride optimization simulation based on genetic algorithm[J].Machinery Design &Manufacture,2009(3):203−205.
[3]Uys P E,Els P S,Thoresson M J.Suspension settings for optimal ride comfort of off-road vehicles travelling on roads with different roughness and speeds[J].Journal of Terramechanics,2007,44(2):1163−1175.
[4]GB 7031—86,车辆振动输入路面平度表示方法[S].GB 7031—86,Vehicle vibration-describing method for road surface irregularity[S].
[5]Dave C,喻凡.车辆动力学及其控制[M].北京:人民交通出版社,2003:72−73.Dave C,YU Fan.Vehicle dynamics and control[M].Beijing:China Communications Press,2003:72−73.
[6]Besselink I,van Asparen F.Numerical optimization of the linear dynamic behavior of commercial vehicles[J].Vehicle System Dynamics,1994,23(1):53−70.
[7]Goncalves J P C,Ambrosio J A C.Road vehicle modeling requirements for optimization of ride and handling[J].Multi-body System Dynamics,2005,13(1):3−23.
[8]刘惟信.汽车设计[M].北京:机械工业出版社,2002:181−182.LIU Wei-xin.Automobile design[M].Beijing:China Machine Press,2002:181−182.
[9]吴翘平.制造公差是影响螺旋弹簧刚度和弹力的主要因素[J].洪都科技,1996(4):20−24.WU Qiao-ping.Influence of manufacturing tolerance as main factor spiral spring rigidity and tension[J].Hongdu Science and Technology,1996(4):20−24.
[10]Koch P N,Yang R J,GU Lei.Design for six sigma through robust optimization[J].Structural and Multi-disciplinary Optimization,2004,26(3/4):235−248.
[11]雷桂媛.关于蒙特克罗及拟蒙特卡罗方法的若干研究[D].杭州:浙江大学数学系,2003:17−18.WEI Gui-yuan.Study on the Monte Carlo and Quasi-Monte Carlo method[D].Hangzhou:Zhejiang University.Department of Mathematics,2003:17−18.
[12]李铁柱,李光耀,陈涛,等.基于 Kriging近似模型的汽车乘员约束系统稳健性设计[J].机械工程学报.2010,46(22):123−129.LI Tie-zhu,LI Guang-yao,CHEN Tao,et al.Robustness design of occupant restraint system based on Kriging Model[J].Journal of Mechanical Engineering,2010,46(22):123−129.
[13]柳高洁,顾克秋.结合 NSGA-Ⅱ算法和蒙特卡罗模拟技术实现结构的鲁棒优化[J].机械设计,2009,26(4):65−67.LIU Gao-jie,GU Ke-qiu.Realizing the robust optimization of structures by combining the NSGA-Ⅱ algorithm with the Monte Carlo simulation technology[J].Journal of Machine Design,2009,26(4):65−67.
[14]李玉强,崔振山,阮雪榆,等.6σ概率优化设计方法及其应用[J].中国机械工程,2004,15(21):1916−1919.LI Yu-qiang,CUI Zhen-shan,YUAN Xue-yu,et al.6σ based probabilistic design optimization method and applications[J].China Mechanical Engineering,2004,15(21):1916−1919.
[15]李玉强,崔振山,陈军,等.基于响应面模型的 6σ稳健设计方法[J].上海交通大学学报.2006,40(2):201−205.LI Yu-qiang,CUI Zhen-shan,CHEN Jun,et al.Six sigma robust design methodology based on response surface model[J].Journal of Shanghai Jiaotong University,2006,40(2):201−205.
