基于MEMS传感器定位测量系统的硬件设计
2012-11-26郑成辉王新华郭淑琴
郑成辉,王新华,郭淑琴
(1.浙江工业大学信息学院,浙江杭州31 0023;2.浙江科技学院信息学院,浙江杭州310023)
0 引言
当今,全球定位系统GPS已日趋成熟,作为一种全新的导航方式在军用及民用领域都发挥着巨大作用。但GPS也有其局限性,如存在定位死区,有累计误差,对静止物体无法直接定向等问题[1]。嵌入式计算机技术和微机电传感器技术的发展以及物联网产业的兴起,使设计开发体积小、成本低的便携监测系统成为可能。近几年微机电传感器技术发展迅速,出现了如微机电加速度传感器和微机电角速度传感器(陀螺仪)等集成度很高,体积很小的传感器芯片,并已经开始在各领域迅速推广普及,如苹果手机中的重力感应技术即采用了微机电加速度传感器。在建筑物内部、隧道内部、地下等无法接收GPS信号的场合,使用微机电传感器同样可以进行未知的自测定,并得到的是3维位置信息。本设计采用微机电3轴加速度传感器、3轴陀螺仪、3轴磁场传感器并结合GPS定位技术,对人员移动位置和状态进行监测。
1 测量原理
1.1 加速度传感器测量原理
任何复杂的运动都可以看作是无数的匀速直线运动和匀加速运动的合成。用加速度计算路程的公式推导得:

为了式l在STM32F4中可以简单的编程,本文做了以下的小修改:

式中,t是采样间隔,ai是第i次采样得到的加速度值,Sn即为第n次采样后测量得到的位移。公式用程序表达如下:

1.2 磁阻传感器测量原理
地球的磁力线起始于南极附近一个点,终止于北极附近一个点,即有两个磁极。如图1所示[2],X和Y轴在水平面内,Y轴向右且垂直于X轴,Z轴铅垂向下。X轴为前进的方向,其与磁北级的夹角定义为方位角α,磁北级与地理北极的夹角定义为磁偏角λ,地磁场总强度的矢量方向He与水平面的夹角定义为磁倾角δ。本文选用陀螺仪作为倾角传感器,倾角传感器测出的俯仰角和滚转角分别为Φ和θ,磁阻传感器测出X,Y,Z轴的地磁场强度分量分别为Hx,Hy,Hz(是相对量而非绝对量,只要3轴的放大比例保持一样即可)。经过坐标变换.将测量值转化到地理坐标系上,从而可求得运动物体的方位角:

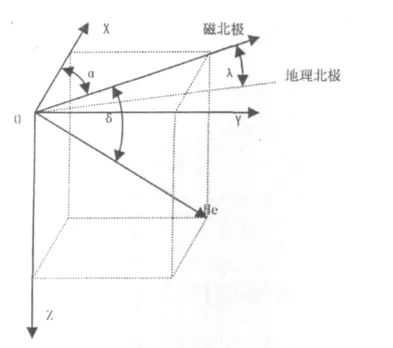
图1 地磁场坐标系
本设计利用磁罗盘原理,通过坐标变换,计算出HX、HY。载体坐标系与水平坐标系两者关系如图2所示。

图2 姿态变换示意图
图2中A-B表示地球南北极轴线;N-S表示磁南北极轴线;磁南北极与地球南北极两轴线的夹角β称为磁偏角。根据坐标关系,得到地球平面磁场强度HX和HY的计算公式[3];

2 系统硬件设计
本文设计的系统硬件结构如图3所示,主要包括由3轴加速度传感器、3轴磁阻传感器和3轴陀螺仪组成的信息获取单元,ARM芯片组成的数据采集和处理单元。本系统采用的是高集成微机电3轴加速度传感器、陀螺仪及磁场传感器芯片,体积小,精度及稳定性较高,有一些自带AD转换功能,可以简化外围电路的设计,为设备的小型化提供了条件。
本设计采用的飞思卡尔公司最近研制的一款3轴加速度传感器MMA7455作为加速度测量单元。加速度传感器MMA745具备了3种灵敏度的测量模式,分别是2g、4g、8g模式,综合考虑灵敏度和准备度,本设计选取了4g模式作为测量模式。此传感器的体积非常小,能够同时测量3个轴上(X、Y、Z轴)的加速度值。
本系统采用的是Honeywell公司生产的磁阻传感器HMC1043 3轴磁阻传感器和VTI公司生产的CMR3000 3轴轴陀螺仪作为角速度测量单元。HMC1043型传感器是一种小型3轴传感器,适用于低磁场测量,16引脚,LPCC封装。其内部有两个磁耦合接线条,偏置条和设置/重置条(S/R),用于入射磁场调整和磁畴校准[4]。CMR3000采用了节能设计,功耗仅为5mA,在正交模式运算时采用共享的传感块和耦合共振器结构,可以消除轴间的相互干扰,角速度测量范围为±2 000°/s,尺寸大小。
传感器采集的信号经过调理电路送到MCU的ADC接口进行模数转换,本设计的MCU采用ST公司Cortex-M4芯片STM32F4,该芯片功能强大,具有DSP处理能力,内部带大容量FLAStt和RAM及12位AD转换器,不需要外扩其它芯片,主频和指令处理速度可达168MHz/210DMIPS,功耗和体积都很小,为监测终端的数据处理提供了强有力的保证。
无线收发模块选用不同类型的成熟模块,设计时采用统一的接口以便更换,增加系统的适应性。本系统设计方案选用的是基于TI公司生产的cc2530F256芯片的无线透传模块,内部运行Zigbee/PRO协议栈,具有Zigbee协议的全部特性,能实现自组网和无线转发功能,本模块将协议栈嵌入模块内部,只留出串口,无需了解Zigbee协议栈,只需要读写串口,即可实现数据的无线传输,简单易用,非常适合嵌入式系统。

图3 系统硬件结构框图
3 系统软件设计
本系统软件采用模块化设计,总体结构分为系统主程序和各功能模块子程序两部分[5]。其中主程序负责整个系统对子程序的及时响应和调用,有效的管理系统软硬什:子程序完成各自指定功能,并供主程序调用,包括初始化、数据采集和滤波、计算及误差补偿校正、移动位移及方位角显示、串口收发和D/A输出等等。
4 结束语
本文基于MEMS传感器并结合嵌入式技术,设计了一套精确定位系统。经测试系统对人员位置的测定能达到百米范围内误差不大于5m,同时能准确测定人员的活动状态。
[1] 曾颖,郭天太,刘月瑶,等.一种磁阻式电子罗盘的开发[J].中国科技信息,2010,59(23):128-129.
[2] 朱学斌.基于MAX155和KMZ52的电子指南针的实现[J].鲁东大学学报(自然科学版),2006,22(4):300-302.
[3] 绍婷婷,马建仓,张永波.具有倾斜补偿功能的三轴磁阻电子罗盘研制[J].电子测量技术,2008,31(6):140-142.
[4] 崔瑞芬,常诘.微型磁阻式子罗盘的设计及罗差补偿方法的研究[J].计算机测量与控制,2010,18(11):2 608-2 611.
[5] 马建仓,胡士峰,邵婷婷.三轴磁阻电子罗盘设计[J].火力与指挥控制,2009,34(3):142-144.
