基于滑模控制的模型参考自适应异步电机无速度传感器控制*
2012-11-24彭达洲
王 任,彭达洲
(华南理工大学自动化科学与工程学院,广州 510640)
0 引言
异步电机无速度传感器矢量控制系统主要需要解决转速估计和转子磁链观测的问题,文献[1]综合给出了现有的几种异步电机转速估算方法,其中模型参考自适应系统(MRAS)是基于稳定性理论设计的参数辨识方法,保证了参数估计的渐进收敛性,且自适应模型是确定的数学模型,便于数字化实现,无论从理论研究和实际应用上都是比较成熟的。
传统MRAS是通过PI控制下的自适应算法调整转速ω^以使误差ξ=0,然而PI控制方法需要调节复杂的增益系统,且系统的鲁棒性不高。近年来,滑模变结构控制理论取得了一定的研究进展,尤其在各类电机的控制系统中有着广泛的应用背景[2],且滑模模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对参数变化及扰动不灵敏,无需系统在线辨识,物理实现简单等优点[3]。然而该方法的缺点在于当状态轨迹到达滑模面后,实际系统由于惯性、执行机构的切换滞后等非理想因素的存在,导致实际滑动模不是准确地发生在切换面上,容易引起系统的剧烈抖振。
针对以上问题,本文设计了一种基于趋近律的滑模模型参考自适应系统(SM MARS)。该方法既能利用滑模控制的强鲁棒性和动态性,同时也能有效减小滑模控制本身所固有的剧烈抖振问题,有效的提高了异步电机无速度传感器的控制性能。
1 模型参考自适应系统(MRAS)
图1所示模型参考自适应系统(MRAS)的基本思想是用一个参考模型的输出与另一个自适应模型的输出相比较,不断调节后者,直到两个模型的输出相等。在MRAS转速辨识方法中,将不含有真实转速的磁链方程(1),(2)作为参考模型(转子磁链电压模型),含有待辨识转速的磁链方程(3),(4)作为可调模型(转子磁链电流模型)[4-5]。

式中:φrα,φrβ——α 和 β 轴的转子磁链;
Vsα,Vsβ——α 和 β 轴的定子电压;
isα,isβ——α 和 β 轴的定子电流;
Rs,Rr——定子电阻、转子电阻;
Ls,Lr——定子电感、转子电感;
Lm——定转子互感;
Tr=——转子时间常数。

图1 基于MRAS的速度估计原理框图
在理想情况下,正确的转速信号作用时,由参考模型和自适应模型计算得到的磁链是相等的,即φrβ=,φrβ=,通过 PI控制下的自适应算法使得可调模型的逼近真实的电机转速ωr。为了保证系统的全局渐进稳定,用 Popov超稳定性法[1,5]则可导出如下转速估计关系式:

2 基于滑模控制的模型参考自适应系统(SM MRAS)
滑模控制器的设计可分为两个步骤:首先设计适当的切换函数或切换流形使得系统进入滑模运动后具有良好的动态特性;其次要设计变结构控制规律使得系统在有限时间内到达切换流形并保持在它上面运动[2]。
2.1 切换函数的设计
本文提出用滑模控制器来调节估计速度的误差。将速度调节信号(式5)选入适当的切换函数[6]中:

这样,在滑动面S=0时,误差信号逐渐衰减到零。当系统到达滑动面,即:

然后误差信号可以描述为

滑模控制器规则可选用李雅普诺夫函数,即


由(5)可得:

将(3)和(4)代入(12)式得:

则式(13)可简写为:

2.2 基于趋近律的滑模控制率的设计
实际系统由于切换装置不可避免地存在惯性,变结构系统在不同的控制逻辑中来回切换,因而导致实际滑动模不是准确地发生在切平面上,容易引起系统的剧烈抖动,为减小变结构控制的抖振问题,著名自动控制专家高为炳[7]利用趋近率概念,提出了一种削弱抖动的方法,通过调整趋近率参数来保证滑动模态达到动态品质要求,同时减弱控制信号的高频抖振。其表达形式为:

在此选用以上到达律来设计,令:

将式(20)化为速度估计式得:

其中,sgn()函数定义为:

已经证明此时对于确定的K,可通过选取适当大的W加快达到滑动模运动的时间[8],从而既保证了系统尽快进入对系统干扰具有良好鲁棒性能的滑动模运动,又可减弱系统抖动对实时控制带来的不利影响。
为了进一步削弱滑模变结构控制过程中出现的抖振,可以对sgn(S)采用开关特性近似连续化的方法:

式中δ——小的正数。
当δ很小时,在切换面S(x)=0附近,控制具有很高的增益,这种高增益对于抑制抖振有利。由式(22)和(24)可得到基于SM MRAS的速度观测器。在搭建仿真模型时,式(21)中f2初始值可能为0,运行时除法会出错,所以起始时可以给f2一个很小的初值,见图2所示。

图2 基于SM MRAS的速度估计原理框图
3 仿真结果及分析
为了验证该方法的相比于传统MRAS的优势,在MATLAB/SIMULINK 7.1下进行仿真实验,仿真原理图如图3所示。
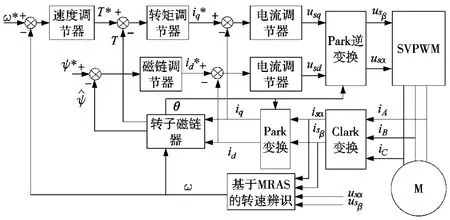
图3 异步电机无速度传感器矢量控制原理框图
电机模型参数为:Rs=0.7384(ohm),Rr=0.7403(ohm),Ls=0.003045(H),Lm=0.1241(H),Lr=0.003045(H),Np=2,J=0.0343kg·m2。首先在空载的情况下,给定电机转速初始值为150rpm,在0.45s阶跃变为-150rpm。
图4与图5分别为传统MRAS和SM MRAS的仿真曲线图,其中包含实际转速、估计转速以及两者的误差曲线。上面两图对比可知,传统MRAS和SM MRAS估计的转速都能很好的跟踪实际转速,而SM MRAS的响应速度相比于传统MRAS要快很多。传统 MRAS的最大静态误差 (()×100%)为0.4%,而SM MRAS的最大静态误差仅为0.15%,转速估计精度要高许多。

图4 基于传统MRAS的转速估计仿真结果

图5 基于SM MRAS的转速估计仿真结果
图6和图7为稳态时SM MRAS的放大仿真曲线图,从中可以看出滑模控制器跟踪状态的开关特性。图6为普通滑模控制器的转速估计,图7为转速稳定时基于趋近律的滑模控制器的转速估计效果,对比可得该方法对抖振有很好的抑制作用。

图6 普通滑模控制器的转速估计仿真结果

图7 基于趋近律的滑模控制器的转速估计仿真结果
4 结束语
仿真结果表明,基于SM MRAS的异步电机无速度传感器矢量控制系统相比于传统MRAS响应速度更快,转速估计精度更高,且省去了复杂的PI增益调节。采用滑模控制也能使系统对内部参数摄动、外部干扰、测量误差及测量噪声等具有完全的自适应性。本文采用的基于趋近律的滑模模型参考自适应系统对抖动也有很好抑制作用,这对系统的稳定性和实时控制无疑会有很大促进作用。
[1]Bimal K.Bose,著,王聪等,译.现代电力电子学与交流传动[M].北京:机械工业出版社,2005.
[2]胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.
[3]刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用,2007,24(3):407-418.
[4]Shady M.Gadoue,Damian Giaouris,John W.Finch.MRAS sensorless vector control of an induction motor using new sliding-mode and fuzzy-logic adaption mechanisms[J].IEEE Transactions on Energy Conversion,2010,25(2):394-402.
[5]Veran Vasic’,Slobodan N.Vukosavic,Emil Levi.A stator resistance estimation scheme for speed sensorless rotor flux orinted induction motor drives[J].IEEE Transactions on Energy Conversion,2003,18(4):476-483.
[6]Mihai Comanescu,Longya Xu.Sliding-Mode MRAS Speed estimators for sensorless vector control of indcuction machine[J].IEEE Transactions on Industrial Electronics,2006,53(1):146-153.
[7]高为炳.变结构控制的理论和设计方法[M].北京:科学出版社,1996.
[8]钟义长,钟伦珑,黄峰.基于滑模变结构的异步电机矢量控制及实现[J].电气传动自动化,2009,31(6):7-9,26.