基于模糊PI的buck-boost变换器控制
2012-11-21王磊
王 磊
(韩山师范学院物理与电子工程系,广东潮州 521041)
DC-DC变换器是一种时变的非线性系统,由于各种寄生参数和损耗的存在,其运行的精确模型很难建立.传统的线性PI控制方法是工程中采用最多的,其中的单电压环控制虽然设计方法简单成熟,但动态特性缓慢,已经极少采用;电压、电流双环PI控制具有较好的动态和稳态特性,但由于是在假定变换器为线性系统的基础上进行控制器设计,在性能要求较高的场合仍难达到要求.于是近年来研究者逐步引入基于非线性系统的控制方法来控制功率变换器,模糊控制就是其中的一种.
单纯的模糊控制的核心是规则表格[1],表格直接决定了变换器中开关的导通占空比.模糊控制和PI控制结合也是比较常见的思路[2-6],可以借鉴变换器小信号模型的一些理论成果,得到比单纯采用PI控制更好的运行特性.目前模糊控制和PI控制结合的形式有两种:(1)电压模糊PI控制,仅以输出电压作为输入控制量,比单电压环的PI控制有更好的动态特性,但响应仍不够好;(2)模糊PI双环控制,模糊控制与电流内环结合,缺点在于系统的动态复杂,难于进行小信号分析,给电压外环设计造成困难.
本文提出了一种以电压、电流为输入变量,融入了过流保护以及最少参数设定的模糊PI电压电流控制器,并以TMS320F240DSP为核心器件,设计了模糊PI控制系统整体实现的软硬件方案,然后对给定参数的buck-boost变换器进行了仿真.仿真结果表明,新的模糊PI控制器能够较大地提升变换器系统在不同运行条件下的动、静态性能.
1 buck-boost变换器的数学模型
Buck-boost变换器是最基本的非隔离电力电子变换器之一,可视为非隔离版的反激式电路,既可升压,又可降压,具有一定的实用和研究价值.
Buck-boost变换器的拓扑结构见图1.在电感电流连续情况(称为CCM工作模式)下其两个工作模态如图2所示,(a)模态为开关管S导通,电感充电,电容向负载供电;(b)模态为开关管S关断,电感放电.
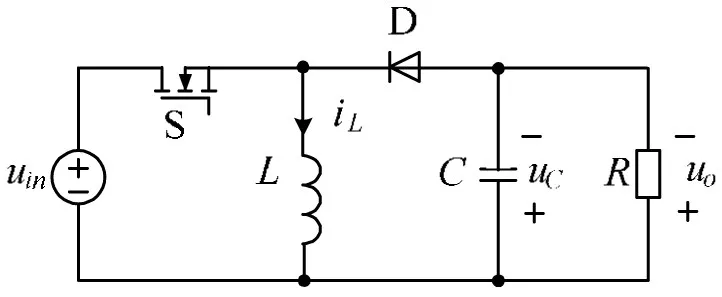
图1 Buck-boost变换器的拓扑
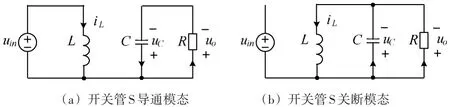
图2 Buck-boost变换器CCM模式下的两个工作模态
当状态变量x选为电感电流iL和输出电压UO,buck-boost变换器在CCM模式下的状态方程可以表示为

Buck-boost PI控制器的设计采用基于小信号模型的频率响应设计技术,运用系统的bode图,以增益、穿越频率和相位裕度为指标,足够的相位裕度下系统的稳定性和暂态响应都得到保证.双环PID的设计首先进行内环设计,然后用内环闭环形成等效功率级,再据此进行外环设计.但是PI控制器只能在一个额定运行点设计,小信号模型的参数,极点、右半平面零点及频率响应的幅度都跟随占空比变化,因此当运行点变化时PI控制器没有很好的响应.
变换器的模型无法精确,因为存在扰动和损耗等情况,严格说来有些参数还是时变的,因为有些参数随时间会发生变动.变换器的模型是占空比的非线性函数,所以期望非线性和智能控制达成更好的性能.
2 模糊控制器的基础
模糊集理论[7-8]最早由Zadeh在1965年提出,模糊逻辑控制器是这个理论最成功的应用之一.它的主要特点是用逻辑变量而不是数值变量.逻辑变量的值用自然语言表达,如大或小,称为模糊集.
模糊集是传统集合(称为紧集)的拓展,紧集中一个元素只能属于或不属于一个集合,而模糊集允许局部属于关系,即一个元素可以局部属于多个集合.
模糊集A由隶属函数定义,给每个元素对这个集合一个给定的隶属度.当然,隶属度可以从0(不属于)至1(完全属于),因此可以写为:

(2)式表明模糊集A属于在特定问题定义的论域X.
模糊单点集是模糊集合的特殊情形.一个模糊集A称为模糊单点,当其仅有一个元素x0且μA(x0)=1,而其他元素的隶属度均为0.变换器的输入变量可视为模糊单点集合.
逻辑变量间的关系描述称为模糊规则,模糊规则是模糊控制的核心,用来描述控制系统的特性.有多种方法定义模糊规则的含义,通常采用句子连接词and和else,由模糊条件表达式Ri定义模糊规则和模糊推理

式中 Ai、Bi、Ci是x、y、z在各自论域上的模糊子集.
如果有多个规则,规则集由规则的联合表示

规则的执行依靠推理,推理的实质是条件判定,判定当前的输入变量情况符合哪条规则的前提条件,即可依据规则得到相应的输出.
本文应用中选择的模糊化方法是模糊单点法,Mamdani的最小模糊含义及最大最小推理方法,及选择用中心区域法进行去模糊,化模糊量为精确的输出控制量,其公式如下

其中Dj是模糊输出变量在第 j条规则下的单点输出值,而αj是用最小运算得到的第 j条规则的满足度,可以写为

式(6)中的μAj(εi)表示输入变量εi在第 j条规则下的隶属度,这由所选隶属函数的形状决定,μBj(εu)、μCj(iL)也可以同理得到; αj的值取上述三个值的最小值.
一般的模糊控制器包含四个部分:(1)模糊化接口,将系统输入转化为模糊量;(2)规则库,包含系统如何运行好的专家经验;(3)推理机制,哪个规则在当前输入可用;(4)去模糊接口,将模糊结果转化为精确的控制量来执行控制.模糊控制器的一般结构如图3所示.

图3 模糊逻辑控制器的一般结构
3 Buck-boost变换器模糊PI控制器的设计
模糊控制的优点是不需要精确的数学模型,依据专家经验即可进行控制器设计.模糊控制能够处理时变、非线性、精确模型难以确立的系统,用于补偿建模过程中的非线性,以改善系统的动态性能.
模糊控制器定义的首要步骤是选择输入变量.为了得到变换器内部能量存储的信息,需要同时采样电压和电流.为了在控制器中加入过流保护,把电流信息定义为两个输入变量,即一共有三个输入变量,输出电压误差εu、电感电流误差εi及为过流保护而设定的电感电流iL.
模糊控制器的输出变量由模糊比例(P)控制器和模糊积分(I)控制器的加和组成,是一个正比于占空比的控制信号,用来控制变换器的开关导通和关断.
其次必须对每个输入、输出变量单独定义模糊集.如图4所示,为输入变量εu和εi选了5个模糊子集:正大(PB)正小(PS)零(ZE)负小(NS)及负大(NB);iL只有两个模糊子集:正常运行(NORM)和电流限制(LIMIT),因为只在过流保护时起作用.为输出变量δP和ΔδI选择了七个模糊子集,以得到平滑的控制效果(PB、PM、PS、ZE、NS、NM及NB).选定隶属函数的分区数后,每个输入输出变量都要用适当的比例因子变换到[-1,1]区间.
隶属函数的形状选择也很关键.规则数会随输入个数而指数增长,两个输入分成5段,则有5*5个规则.图4选用三角形隶属函数的优点是,任何时候只有最多两个大于0的隶属度,而且两个隶属度之和为1,大大减少了运算量;输入分段数选择5个,可以表达成为2n+1的形式,后面运算中的除法可以用移位运算来做.

图4 εu、εi、δp、ΔδI和iL的隶属函数图
用TMS320F2812可以实现模糊PI控制器.2812是32位定点DSP,片内有128K的FLASH存储器,CPU运行在150 MHz.2812的外设配置适合嵌入式控制的应用,如事件管理器模块及双12位16通道的ADC,完成一次转换的时间仅80 nS.
图5是用2812实现模糊PI控制器的功能框图,图6是2812内部算法的示意图.
依照运行要求对模糊规则的设定是模糊控制器的关键,首先按照电感电流情况分为两个工作区域:正常工作和过流保护.

图5 2812实现模糊PI控制器的功能框图

图6 2812实现模糊PI控制器的算法结构图
(1)正常工作时,按照输出电压与额定电压的误差分为两种情形:
误差较大时(εu为PB或NB),控制作用必须足够强,即δp为PB或NB;ΔδI应为ZE(取消积分作用),以防止积分项的积累引起较大的过冲.此时控制主要由电压误差εu决定,电流误差εi不起作用.
误差较小时(εu为PB或NB),此时电流误差也参与决定占空比,以保证稳定性和较快的动态响应.此时的控制规则可以依据能量平衡分为三种情形:
1) εu和 εi都为ZE.
δP和ΔδI都应为ZE,变换器的稳态特性主要由ΔδI项决定.
2) εu和 εi符号相同.
εu和εi同为正,δP和ΔδI都应为正,系统能量增多;εu和εi同为负,δP和ΔδI都应为负,系统能量减少.
3) εu和 εi符号不同.
δP和ΔδI都应保持为ZE,防止过冲或欠压,等待电感在输出电容上放电.
图7的(a)和(b)分别给出了在上面规则下模糊控制器P和I的控制作用图.
(2)过流保护情况下:
1) δP依据输出电压误差取不同的值.
如果εu为PB,δP保持为ZE以限制电流值;相反地,当εu为ZE,δP应为NB.各种输出电压误差情况下的模糊比例控制器的规则见表1.

图7 电感电流在正常区时模糊控制器P和I的控制作用图

表1 过流保护时各种输出电压误差情况下的模糊比例控制器的输出规则
2)Δ δI应为ZE.
过流保护情况下禁止了积分,以避免输出电压出现过冲.
为了变换器运行特性更好,可以对规则和相关参数加以微调.
4 仿真分析与验证
为了验证上述设计过程的实用性,下面对一个主电路设计完备的buck-boost变换器进行仿真验证.变换器的主要参数见表2.

表2 buck-boost变换器的主电路参数
图8(a)是轻载零状态起机(最差运行情况)的电感电流iL和输出电压UO的MATLAB仿真波形,最初输出电压误差很大,较大的占空比令电感电流一直上升到电流保护区域,不过在到达预设的限值(10A)之前受到限制,并逐渐回落,输出电压较快到达设定值附近,而且过冲较小.图8(b)是变换器在负载从轻载跳变到满载时的仿真波形,电感电流和输出电压的过冲控制和响应速度都不错.
5 结论
直观来说,模糊PI控制的优点在于可以分段设定PI参数,达到每种情况下的最佳运行特性,因此可以达到比单纯的PI控制器更好的效果.

图8 buck-boost变换器仿真波形
本文提出了一种结合电压、电流PI双环的模糊控制器,并以buck-boost变换器为例,系统地给出了相关参数的设计,然后结合TMS320F2812DSP给出了具体的软硬件执行方案.仿真结果证实了控制器的有效性.
[1]沈伟.基于模糊控制的新结构降压变换器的研究[D].天津:天津大学,2006:26.
[2]张化光,路文赜,刘秀翀.基于电流模式的Buck变换器的模糊控制[J].控制工程,2009(4):472-474.
[3]王萍,辛爱,芹邹宇.高性能模糊pid控制dc/dc变换器[J].电力电子技术,2007(8):102-103.
[4]陈乐柱,徐艳霞,刘雁飞.电流模式模糊控制Boost变换器的研究与建模[J].电子技术,2009(1):36-39.
[5]MATTAVELLI P,ROSSETTO L,SPIAZZIG.General-purpose fuzzy controller for DC-DC converters[J].IEEETransactions on Power Electronics,1997,12(1):79-86.
[6]GUO L,Hung Y J,NELMS R M.Comparative evaluation oflinear PID and fuzzy controlfor a boostconverter[C].Industrial Electronics Society,2005(6):555-560.
[7]DRIANKOV D,HELLENDOORN H,REINFRANK M.An Introduction to Fuzzy Control[M].Berlin:Springer,1996:120.
[8]PASSINO K M,YURKOVICH S.Fuzzy Control[M].Boston:Addison-Wesley,1997:54.
