8m×6m风洞特大迎角机构连续扫描试验技术研究与应用
2012-11-15唐乔乔张卫国刘忠华
唐乔乔,张卫国,刘忠华,陈 洪
(中国空气动力研究与发展中心,四川 绵阳 621000)
0 引 言
风洞试验中,常规测力试验方法通常分为两种:步进式和连续式。步进式是在模型姿态角系统(迎角或侧滑角)逐点运行、停顿这一循环过程中进行测量的方法;连续式是模型姿态角系统(迎角或侧滑角)连续运行,在运行过程中进行同步测量的方法,通常称之为连续扫描试验技术。步进式测量过程中模型与来流之间的角度是恒定的,具有充足的时间建立流场,是风洞测力试验中获取数据的基本方法;而在连续式测量过程中模型与来流之间的角度不断变化,角速率运动过快时,类似大振幅振荡试验,模型运动会引起气动迟滞现象。但是,当模型角速率运行较低时,且模型区域内不存在喷流等高速、复杂流场时,对应迎角下能够建立相对稳定的流场,模型运动对流场的影响可以忽略,即不会出现气动迟滞现象,气动数据能够达到步进试验的同等效果,这也是连续扫描试验技术可以实现的基础。
与步进式相比,连续扫描试验技术可有效提高试验效率,获取密集的气动力数据,在国外先进的生产型风洞,如德-荷兰风洞(DNW-LLF),已经广泛采用连续扫描试验技术进行试验。为提升8m×6m风洞的试验能力,开展了连续扫描试验技术研究,并在风洞中成功应用了该项技术。
1 试验设备
1.1 风洞设施
8m×6m风洞总长237m,风洞具有串列的两个试验段。第一试验段高16m、宽12m、长25m,常用风速5~20m/s;第二试验段高6m、宽8m、长15m,常用风速20~85m/s。
1.2 特大迎角机构
8m×6m风洞特大迎角机构是该风洞配套的多用途支撑系统,其主要性能指标如下:迎角变化范围-10°~120°,侧滑角变化范围-30°~30°,精度0.05°[1]。
1.3 试验模型
使用两种不同布局形式的试验模型进行试验:
(a)YF-16战斗机全金属模型,缩比1∶9,展长0.9815m,弦长0.3704m,参考面积0.3210m2。模型机头、机翼前缘、垂尾前缘等多处粘贴锯齿形固定转捩带。图1为试验模型在风洞中进行风洞试验的照片。
(b)某型运输机全金属模型,缩比1:8.84,展长5.597m。
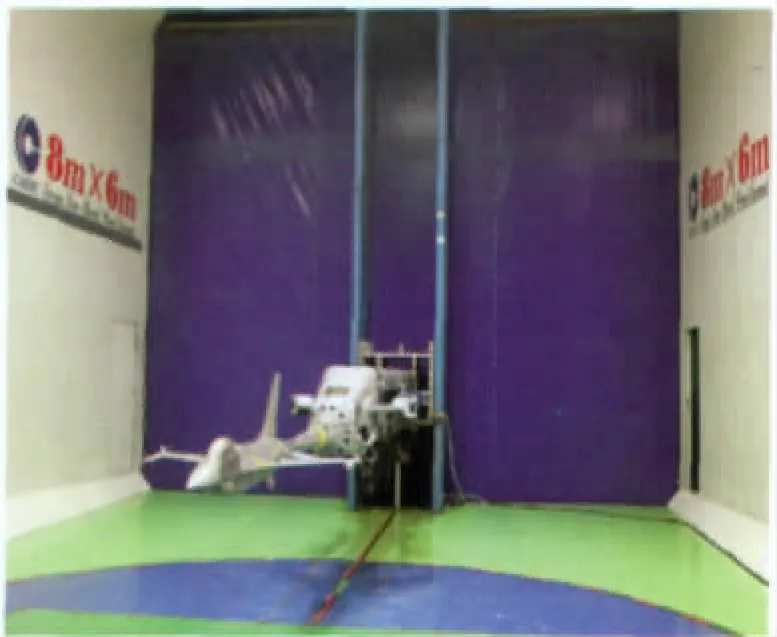
图1 YF-16试验模型照片Fig.1 The test model photograph
1.4 天平及测控系统
试验使用杆式六分量天平。风洞测控系统为一体化网络测控系统,包括试验运行管理、速压控制、模型姿态角控制、数据采集、数据处理、数据分析等,见图2[2]。
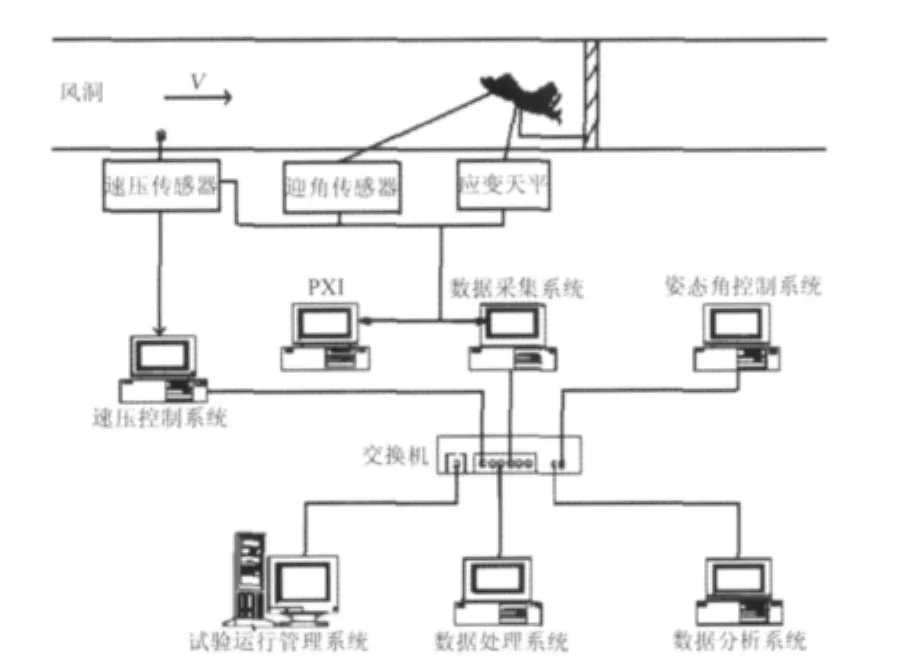
图2 测控系统组成Fig.2 The structure of measurement and control system
2 关键技术及实现
2.1 速压精确控制及采集
模型的连续运行对速压的稳定性和跟随性要求较高,因此对速压控制系统进行了改进,提高了稳转速和稳速压控制精度,使电机稳定时间更短(小于50s),转速波动量更小(从0.7转下降到了0.2转),稳转速控制精度高于1‰,稳速压控制精度接近3‰。
为了准确反映风洞试验段模型区域的真实速压,对速压反馈点的位置选取进行了系统研究,铺设了两路实时速压反馈信号,测试不同位置实时速压的相关性和连续变迎角过程中速压的变化情况。
2.2 模型姿态角精确控制及采集
模型姿态的平稳变化可以减小模型对流场的扰动,这是连续扫描试验技术实现的必要前提。为保证模型连续变化迎角时运动的匀速性,对特大迎角控制程序PID参数进行了调整,调试出了满足定位精度和平稳速度要求的系统控制参数。
精确的姿态角测量是获取准确气动数据,实现连续扫描试验技术的重要环节。实时迎角传感器使用方便,具有较高的测试精准度,是当前测试实时迎角的主要仪器。
2.3 天平信号采集及处理
采用PXI-6281数据采集系统进行天平、速压、角度信号采集,相邻通道采集时间间隔0.2ms,采集频率100Hz。
连续扫描和常规步进方式数据处理主要区别在于对天平信号的处理。步进方式测力试验时,天平信号集中在低频部分,而噪声分布在高频部分,针对这一特点,采用低通滤波器进行滤波,然后对5s数据平均进一步消除干扰。而连续扫描是在模型运动过程中进行采集的,不能通过平均的方式消除干扰,故采用小波消噪进行处理,保留有用信号中的尖峰和突变部分。图3为原始信号小波消噪前后对比图。

图3 小波消噪前后对比Fig.3 Signal contrast between wavelet disposal
连续扫描试验时,先对初读数和吹风原始数据中的每个通道数据进行小波消噪处理,然后按照指定的角度序列进行插值,分别生成与常规测力方式相同格式的初读数和吹风数文件,见图4。再按标准的数据处理流程进行处理。

图4 数据处理流程示意图Fig.4 Schematic diagram of the data processing
3 试验控制流程优化
连续扫描测力试验不同于常规步进测力,需对原有的试验运行管理系统进行补充和完善,其试验流程控制见图5。根据试验条件需求,输入实时速压、扫描起点、扫描终点、扫描频率、角度序列差值间隔等,试验运行管理系统将这些指令自动发送给各个子系统,并根据试验条件自动识别角度范围并控制角度机构运行,待模型运行角度进入试验角度范围后通知数据采集系统开始采集,采集结束后机构角度回零并停风[3]。

图5 试验流程控制示意图Fig.5 Schematic diagram of the test control process
4 应用结果分析
4.1 不同角速率对试验结果的影响
连续扫描试验技术是通过同步测量来获取模型进入匀速段时的气动力,测量结果本身不存在附加的惯性力,但模型角速率运动会影响模型绕流的附着程度,因此连续扫描角运动速率要保证气流附着与步进试验一致。图6是角速率分别为ω=0.2°/s,0.5°/s,1.0°/s的连续扫描试验与步进试验的结果比较。结果表明:不同角速率对应的曲线差异不大,但0.5°/s时的数据与步进数据更加吻合,原因可能是较低角速率时特大迎角机构控制平稳性不够,而在大角速率下流场建立不充分造成。综上所述,连续扫描试验技术采用角速率为0.5°/s是合适的。

图6 不同角速率对扫描结果的影响Fig.6 Comparison of different rates of angle of attack
4.2 试验精度
试验风速70m/s,角度范围0°~10°,分别进行了步进和连续两种试验方式的7次重复性试验,均方根计算精度结果见表1。结果表明:两种测量方法的升力、阻力和俯仰力矩系数精度均达到或接近优秀指标,连续扫描试验技术符合国军标精度要求。
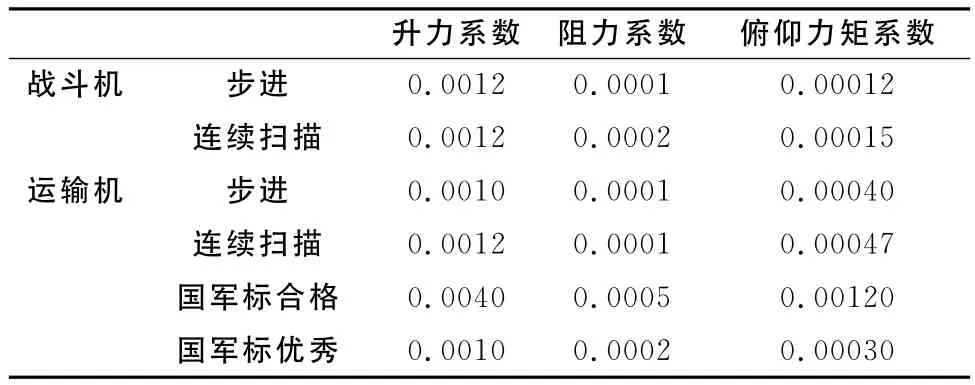
表1 测试精度表Table1 The precision of test
4.3 试验准度
为检验连续扫描试验技术的测试准度,在迎角0°~90°范围内,分别使用步进与连续扫描两种测试方式进行了YF-16模型试验,其中连续扫描角速率0.5°/s。
图7给出了升力、阻力及俯仰力矩系数曲线。比较可知:整个测试迎角范围内,连续扫描测试曲线与步进结果曲线吻合,升力线斜率差别在0.5%之内,最大升力系数相差0.6%。而在迎角70°附近区域,连续扫描曲线数据点出现跳动。究其原因可能是在此大迎角范围,战斗机出现较为不稳定的前体不对称涡,这种非定常的流场造成气动数据的波动,而常规步进试验数据是5s时间内的平均结果,因此相比较为光顺。
从图7还可以看出,迎角15.5°附近,如果步进试验角度不加密,则难以捕捉各系数曲线此区域的弯曲变化,而连续扫描测试方法则可以充分反应出各系数的这种局部微小变化。
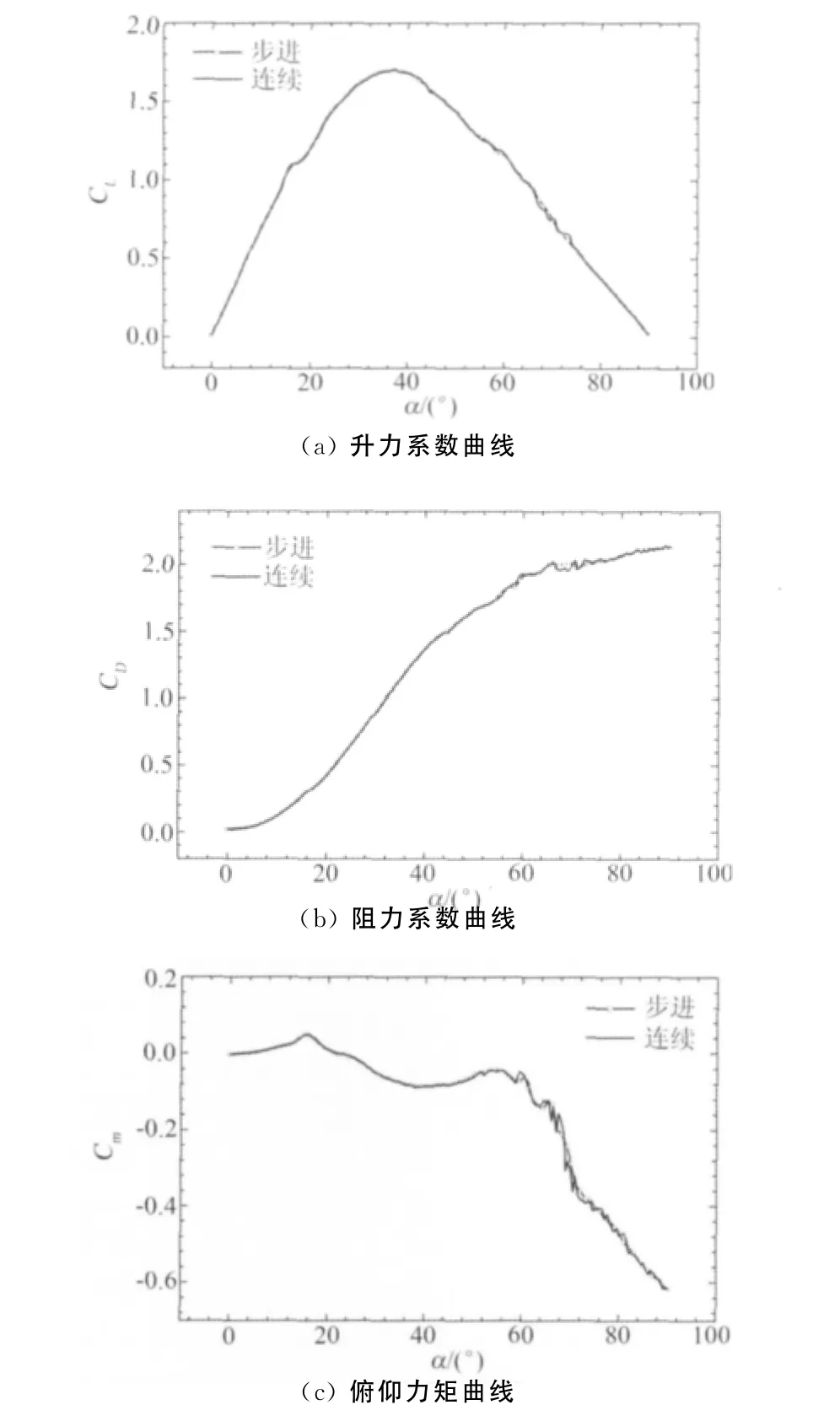
图7 战斗机步进与连续扫描试验数据对比Fig.7 Comparison between step by step and continuous scan on one fighter plane
图8为连续扫描试验技术在运输机布局上的应用结果曲线,由图8可以看出:失速迎角16°之前,连续扫描结果与步进结果一致,最小阻力系数差别在0.3%之内。而在迎角18°后,二者有一定差异,这种差异可能是失速后的流场不稳定引起的。
4.4 试验效率
连续扫描试验技术可大幅提高试验效率。针对战斗机模型,步进试验方式,角度间隔1°,迎角0°~90°范围内,吹风时间约27min,而连续扫描试验方式,同等迎角范围,0.5°/s角速率吹风时间仅在4min之内,吹风时间大幅降低。考虑采集初读数时间,可由54min节约到8min,效率明显提升。
针对运输机模型,迎角-6°~24°范围内,获取一条数据曲线的时间可由通常的20min缩短至5min。
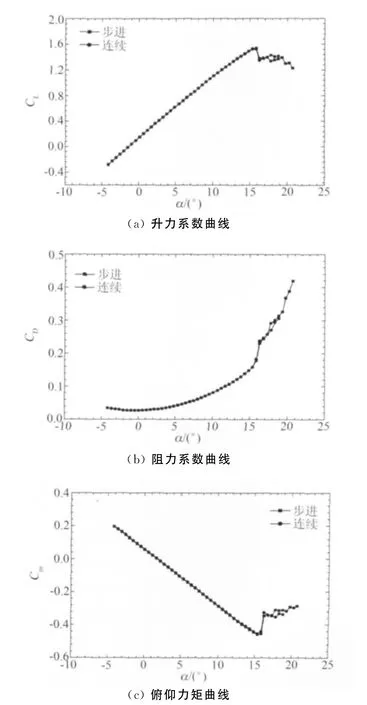
图8 运输机步进与连续扫描试验数据对比Fig.8 Comparison between step by step and continuous scan on one transport aircraft
5 结 论
(1)通过对速压、测控、实时迎角测量、试验流程等各系统的改进,实现了8m×6m风洞特大迎角机构的连续扫描试验技术,并成功地在战斗机和运输机布局中获得了应用,试验效率大幅提升;
(2)连续扫描试验技术测试精度达到了步进试验同等水平,符合国军标使用要求;
(3)连续扫描试验技术获取的升力、阻力和俯仰力矩系数曲线与步进试验方法吻合,获取的数据信息量更为丰富。
[1] 孙海生,张晖.8m×6m风洞特大迎角试验设备研制[J].实验流体力学,2009,23(1):70-73.
[2] 叶吉成,肖京平.8m×6m风洞技术改造研究[J].流体力学实验与测量,2001,15(3):75-76.
[3] 晋荣超,刘忠华.基于测控局域网集散系统的试验管理软件研制[J].流体力学实验与测量,2001,15(4):90-94.
