GPS/GLONASS组合精密单点定位性能分析*
2012-11-14王正军
王正军
(长沙理工大学交通运输工程学院,长沙 410076)
GPS/GLONASS组合精密单点定位性能分析*
王正军
(长沙理工大学交通运输工程学院,长沙 410076)
在阐述GPS/GLONASS组合精密单点定位(PPP)方法及模型的基础上,利用研发的软件从静动态定位精度和动态定位收敛性方面比较分析了GPS、GLONASS及GPS/GLONASS组合3种方式的精密单点定位结果。结果表明:3种方式都能获得厘米级的静动态定位精度,但组合方式较单一方式有较好的统计精度;在动态定位收敛性方面,组合方式能提高收敛速度,且在GPS卫星较少情形下尤为突出。
GPS;GLONASS;精密单点定位(PPP);组合方式;统计精度
1 前言
GPS精密单点定位技术(PPP)的基本思想是将GPS定位中的误差划分为轨道误差、卫星钟差和电离层延迟误差、对流层延迟误差及接收机钟差,将定位中的卫星轨道和卫星钟差固定为一个全球网络解得到的高精度卫星轨道和钟差(如IGS及其分析中心发布的高精度GPS卫星轨道和钟差产品),采用消电离层组合观测值消去电离层延迟误差,将对流层延迟误差和接收机钟差作为未知参数与测站的坐标参数一并解算,获取高精度的定位结果,包括高精度测站坐标、天顶对流层延迟参数和接收机钟差参数[1,2]。PPP数据处理策略较差分技术主要有以下优点:1)只需要单台GPS接收机就可完成作业,方式灵活,定位精度均匀,且极大地降低了成本;2)解算速度与测站数成线性比例关系,打破了网络解的计算瓶颈;3)可利用的观测数据多,保留了所有观测信息。
近年来,随着GLOANASS卫星系统的现代化发展,该系统的卫星数和性能都得到了大幅度的提升[3],至2011年,该系统再次实现了拥有24颗卫星的完整星座[4],从而单独采用该系统进行导航定位能获得较好的定位精度。加之IGS分析中心欧洲空间局(ESA)及俄罗斯信息与导航分析中心(IAC)能免费向世界用户提供GLONASS卫星精密星历和钟差数据产品,使得组合GPS/GLONASS进行PPP已成为可能。目前,IGS组织正在逐步增加GPS/GLONASS站的布设,同时国内外学者在组合双系统数据定位方面开展了相关的研究,并取得了不少的成果[5-8],其中非差模糊度的固定及动态定位收敛时间的研究最为活跃。目前该技术正在向实时性、高精度性方向发展。本文将基于研制的PPP数据处理软件进行大量的数值实验,进而系统地比较分析GPS、GLONASS及GPS/GLONASS组合3种方式在定位精度及定位收敛时间方面的性能差别,进而为工程实践应用提供指导。
2 GPS/GLONASS组合精密单点定位
目前PPP通常采用消电离层伪距和相位观测值进行数据处理,同时顾及GPS与GLONASS的系统时间差dtsys[9],GPS/GLONASS组合精密单点定位的观测方程可以描述成[10]:

式中,g和r分别代表GPS卫星和GLONASS卫星; PIF和φIF分别表示消电离层的组合测码伪距和载波相位观测值;ρ是卫星至接收机间的几何距离;c是光速;dtg为相对于GPS时刻的接收机钟差;NIF为消电离层组合模糊度;dtsys是GPS与GLONASS系统之间时间基准差;ε为多路径误差、观测噪声及其他残差。
假设某一历元接收机总共观测到n颗卫星,则将上述观测方程线性化,并将所有卫星的伪距和相位观测值误差方程列立在一起,写成矩阵形式有:

数据处理中还需考虑观测值的随机模型,即观测值的方差阵。目前简单且效果较好的定权方法为根据卫星观测值高度角的定权方法。假设某一卫星i的高度角为elevi,天顶方向消电离层伪距观测值和相位的中误差分别为δ0,P和δ0,L(一般取δ0,P=1 cm,δ0,L=1 m),则卫星i的伪距和相位观测值方差为:
在GPS/GLONASS组合PPP数据处理中,还存在一些关键技术,包括两卫星系统的时空框架差异,GPS和GLONASS观测值之间的定权方法[11],GLONASS数据的质量控制等。
3 精密单点定位性能分析
为了比较GPS/GLONASS组合系统与GPS或GLONASS单一系统进行PPP定位在精度及收敛性方面的性能差别,本文利用笔者研发的PPP数据处理软件处理我国IGS站BJFS站的数据。该测站安装了能同时接收GPS和GLONASS卫星系统的双频GNSS接收机TRIMBLE NETR8,数据采样间隔为30 s,观测截止高度角为15°。数据解算采用ESA提供的最终精密轨道与钟差产品。为了直观地对比分析PPP定位结果,文中把解算的测站位置信息从精密轨道决定的ITRF坐标系(X、Y、Z)转换到测站坐标系(E、N、U),该坐标系原点为IGS提供的ITRF2005坐标推算到数据处理历元的值。
3.1 静态定位精度分析
静态定位按下列两种方案进行分析:
单天解方案:对BJFS站2011年4月1—5日共5天的数据分别进行 GPS、GLONASS、GPS/GLONASS组合3种情形的精密单点定位,每24小时的数据作为一个解算时段,共获得15组解。
小时解方案:采用TEQC软件对24小时的观测数据进行切割,分别以30分钟、1小时、2小时、3小时、4小时、5小时、6小时作为解算时段,其他的信息与单天解方案相同,共获得105组解。
表1为单天解坐标位置精度信息,其中DOY代表GPS年积日(例如DOY 91表示2011年4月1日),GPS代表仅采用GPS数据的结果,GNSS代表同时采用GPS和GLONASS数据的结果,而GLN代表仅采用GLONASS数据的结果,下文描述相同。从表中的结果可以得出:3种情形的精密单点定位结果在各个测站坐标分量上基本能达到2 cm的精度,其中同时采用GPS和GLONASS数据较仅采用GPS数据在高程U方向上能获得更好的精度,但在平面N方向有所下降。在三维位置精度方面,3种情形都在3 cm以内,其中GPS/GLONASS组合方式精度最高,GPS方式次之,GLONASS方式最差。值得一提的是,由于GLOANSS系统最近几年的现代化,该系统能达到cm级的定位精度,且与GPS系统所能获得的精度差别较小,文中所得结果最大为8 mm。
表2为小时解坐标位置的三维精度信息。从中可以看出,当仅采用15分钟的观测数据时,GPS方式与GLONASS方式获取的精度没有规律性,因为这主要取决于数据时间段内的各系统卫星分布几何特征,但GPS/GLOANSS组合方式能获得比前两者单一方式较高的精度。当采用30分钟的观测数据时,GLOANS方式与GPS方式相比有明显的差别,同样 GPS/GLOANSS组合方式能获得比 GPS或GLONASS方式更高的精度,且改善较大,但随着观测数据的增多,这种精度提高的能力逐渐下降;当采用的观测数据达到2小时,3种情形就都基本能获得与单天解相当的位置精度。
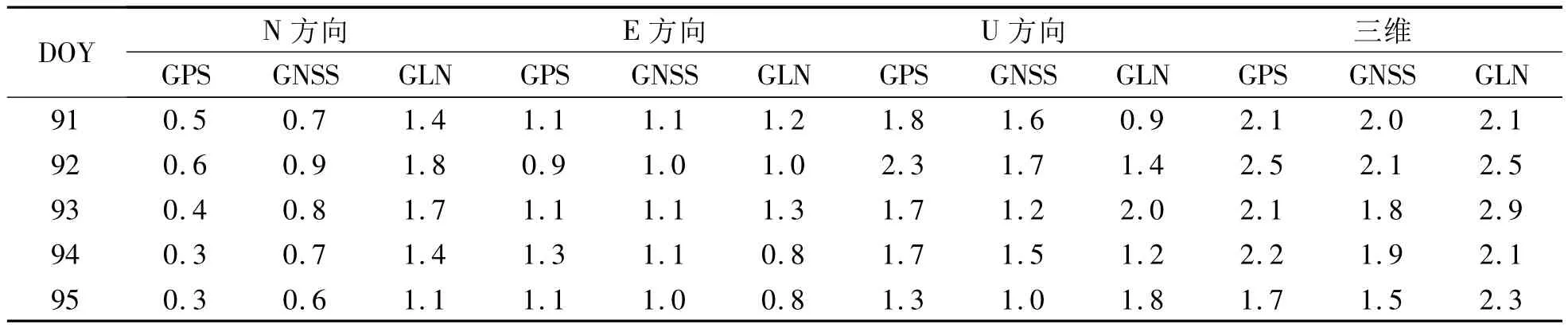
表1 PPP静态定位单天解的位置误差(单位:cm)Tab.1 Position error of day solution for GPS,GLONASS and their combined PPP(unit:cm)
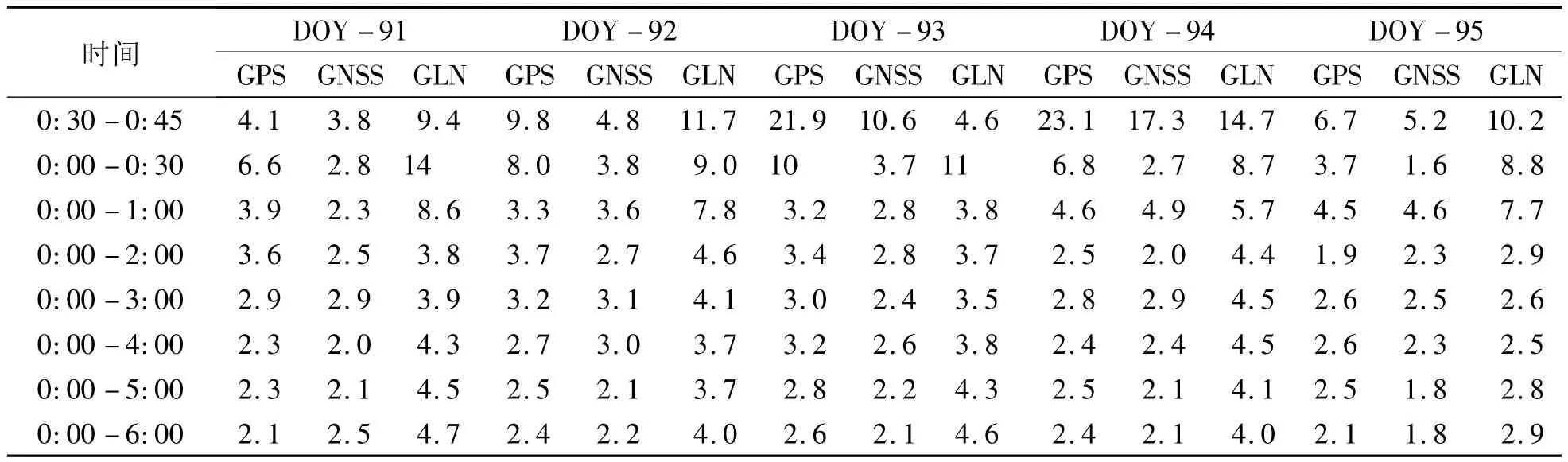
表2 PPP静态定位小时解的三维位置误差(单位:cm)Tab.2 Three dimensional position error of hour solution for GPS,GLONASS and their combined PPP(unit:cm)
3.2 动态定位精度分析
精密单点定位技术在低轨卫星精密定轨、航空动态测量和海洋测绘等动态定位方面具有不可估量的应用前景。文中通过大量的数值分析以验证GPS、GLONASS及其组合进行PPP动态定位所能达到的精度。由于数据处理是事后处理方式,本文动态定位时进行了双向滤波,以保证结果不受收敛时间的影响,具有一致性。
为了便于对收敛性分析结果的解释,图1给出了2011年4月1日BJFS站观测到的有效GPS和GLONASS卫星数,其中GPS卫星数最小为7颗,最大为12颗,GLONASS卫星数最小为4颗,最大为10颗,同一时刻观测到的所有卫星数最小为11颗,最大为21颗。图中数值直观表明GLONASS系统增强了GPS系统的可用性和可靠性。
图2~4描述的是我国IGS站BJFS站2011年4月1日动态PPP定位在3个测站坐标分量的残差。图中结果表明:GPS方式能获得平面5 cm、高程10 cm的定位精度;GLONASS方式能获得平面10 cm、高程15 cm的定位精度,且在数值上会出现突跳; GLONASS方式不能保证定位的连续性,如图中的两端部分,结合图1发现这些时间段里观测的GLONASS卫星数少于5颗;GPS/GLONASS组合方式在平面和高程方向都能达到5 cm的精度,特别是在高程方向,较前两种方式有较大精度提高。
表3给出了2011年4月1—5日GPS、GLONASS及其组合的动态PPP定位精度统计信息。从坐标分量来看,GPS方式与GPS/GLOANSS组合方式在平面上具有十分相近的数值,而在高程方向,后者较前者有近1cm的精度改善。而GLONASS方式在3个坐标方向上都较GPS方式和GPS/GLOANSS组合方式精度低。从三维位置的统计信息来看,GPS、GLONASS及其组合进行动态PPP定位分别能获得4 cm、3 cm、10 cm以内的精度。
3.3 动态定位收敛性分析
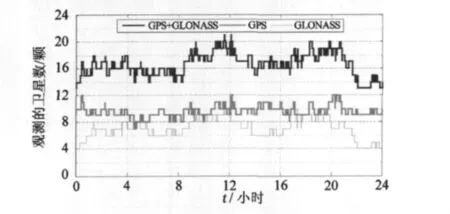
图1 2011年4月1日BJFS站观测的卫星数Fig.1 Satellite number observed at BJFS station on first of April,2011
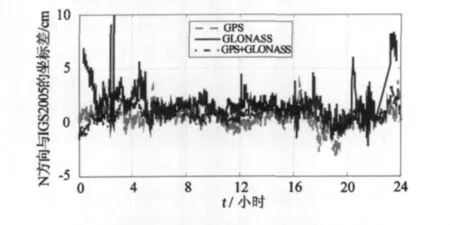
图2 PPP动态定位结果与ITRF2005坐标的较差(N方向)Fig.2 Difference between PPP kinematic positioning results and ITRF 2005 coordination in N direction
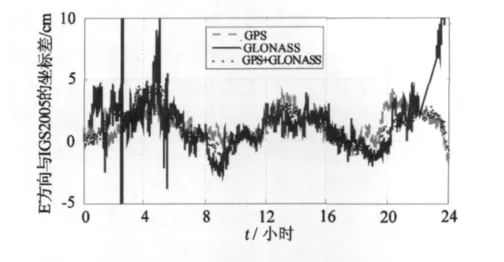
图3 PPP动态定位结果与ITRF2005坐标的较差(E方向)Fig.3 Difference between PPP kinematic positioning results and ITRF 2005 coordination in E direction

图4 PPP动态定位结果与ITRF2005坐标的较差(U方向)Fig.4 Difference between PPP kinematic positioning results and ITRF 2005 coordination in U direction
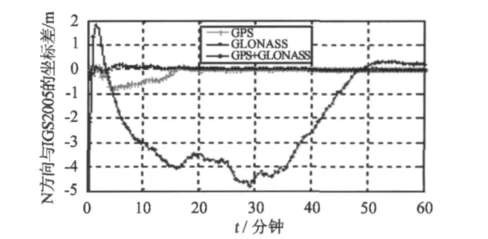
图5 GPS卫星数较少情形下动态PPP的收敛性(N方向)Fig.5 Coverage of kinematic precise point positioning for low GPS satellite number case in N direction
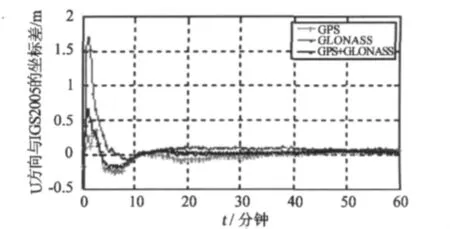
图6 GPS卫星数较多情形下动态精PPP的收敛性(U方向)Fig.6 Coverage of kinematic precise point positioning for high GPS satellite number case in U direction
经过近十几年国内外学者的研究,精密单点定位的事后处理算法及应用已经相对较成熟。由于人们对GPS动态实时定位存在广泛的需求,精密单点定位技术的研究也步入了实时定位阶段,而实时动态定位的收敛性是衡量PPP定位性能的一个重要指标。本文依据图1给出的观测卫星变化情况,选用两个时段的数据来分析GLONASS数据给PPP定位收敛性带来的影响。第一时段为UTC 4:00—5:00,该时段GPS的平均卫星数相对较少,第二时段为UTC 11:00—12:00,该时段GPS的平均卫星数相对较多。由于考虑的是定位的收敛时间,所以参数估计时采用单向滤波。图5、图6分别对应两时段高程方向的动态定位收敛情况,平面方向表现出与高程方向类似的性质,限于篇幅,在此不提供。综合两图可以看出,同时采用GPS和GLOANSS数据比仅采用GPS或GLONASS数据在收敛时间方面都有提高,在GPS卫星数较少的情形下,改善尤其明显(图5)。就单一卫星系统来说,GLOANSS比GPS的收敛时间要长,这主要是两系统现阶段的工作卫星数有较大差别,GPS为32颗,而GLONASS为24颗,其次就是两系统在整体性能上也有差别。图6同时也表明,当GLONASS卫星数达到9颗时,其收敛时间也能降到10分钟左右,与GPS系统差别不大。
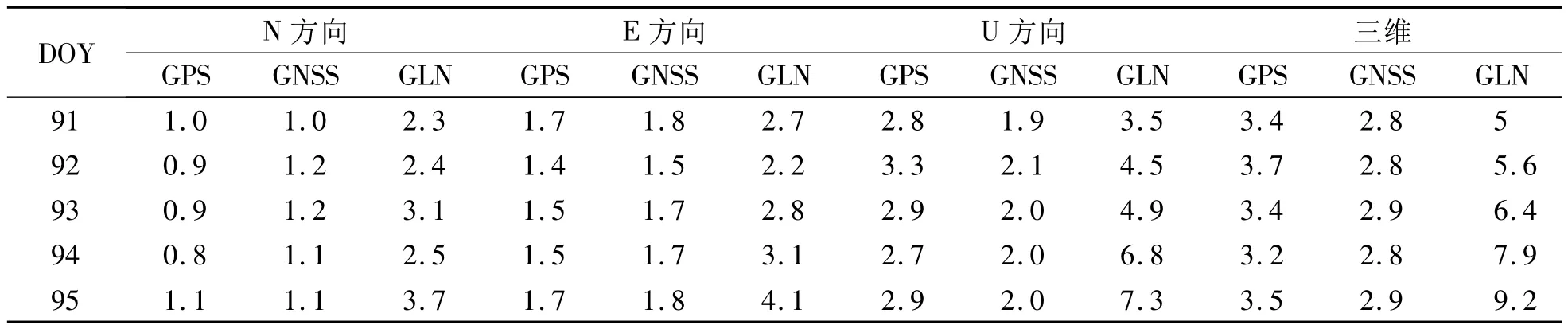
表3 动态PPP定位位置误差的RMS精度统计(单位:cm)Tab.3 RMS statistics of position errors in GPS/GLONASS kinematic precise point positioning(unit:cm)
4 结论
随着GPS和GLONASS卫星系统的现代化发展,以及IGS分析中心为全世界用户免费提供精密卫星轨道和钟差的出现,基于GPS、GLONASS以及其组合进行PPP定位都已成为可能。文章利用自行研制的软件,对我国IGS站BJFS站的数据进行了数值分析,以验证GPS/GLONASS组合方式较单一方式在静动态定位精度方面及动态定位收敛性方面的性能差异。结果表明,3种方式都能获得厘米级的精度,但组合方式较单一方式有较好的统计精度;在收敛性方面,组合方式能提高收敛速度,在GPS卫星较少的情形下尤为突出。可以得出,多系统组合PPP能增强定位的连续性、可靠性,提高定位精度,缩短定位收敛时间。随着欧盟GALIEO系统的大力发展,这种定位方式的优势及应用前景将进一步得以验证。
1 Zumberge J F,et al.Precise point positioning for the efficient and robust analysis of GPS data from large networks[J].Journal of Geophysical Research,1997,102(B3): 5 005-5 017.
2 易重海.实时精密单点定位理论与应用研究[D].中南大学,2011.(Yi Zhonghai.Research on theory and application of real time precise point positioning[D].Central South University,2011)
3 Cameron A.The system:GLONASS forecast bright and plentiful[J/OL].GPS World,2010,21(10):10-11.http://www.gpsworld.com.
4 http://www.glonass-ianc.rsa.ru/en/GLONASS/index.php
5 Cai C and Gao Y.A combined GPS/GLONASS navigation algorithm for use with limited satellite visibility[J].The Journal of Navigation,2009,62(4):671-685.
6 Li Xingxing,Zhang Xiaohong and Guo Fei.Study on precise point positioning based on combined GPS and GLONASS[C].ION GNSS,Savannah,GA,2009.
7 Tor M,et al.PPP with GPS and GLONASS:The new G2[J/OL].GPS World,2010,(3):28-36.http://www.gpsworld.com.
8 Bruyninx C.Comparing GPS-only with GPS+GLONASS positioning in a regionalpermanent GNSS network[J].GPS Solutions,2007,11:97-106.
9 Habrich H.Geodetic applications of the global navigation satellite system(GLONASS)and of GLONASS/GPS combinations[D].University of Bern,Switzerland,1999:7-11.
10 张小红,等.GPS/GLONASS组合精密单点定位研究[J].武汉大学学报(信息科学版),2011,35(1):9-12.(Zhang Xiaohong,et al.Study on precise point positioning based on combined GPS and GLONASS[J].Geomatics and Information Science of Wuhan University,2011,35(1):9-12)
11 蔡昌盛,等.GPS/GLONASS组合精密单点定位研究[J].大地测量与地球动力学,2011,(3):85-89.(Cai Changshen,et al.Accuracy assessment of combined single frequency GPS/GLONASS single point positioning[J].Journal of Geodesy and Geodynamics,2011,(3):85-89)
PERFOMANCE ASSESSMENT OF GPS/GLONASS PRECISE POINT POSITIONING
Wang Zhengjun
(School of Communication and Transportation Engineering,Changsha University of Science and Technology,Changsha 410076)
After explaining the method and models for Precise Point Positioning(PPP)based on combined GPS and GLONASS,the positioning accuracy of static and kinematic PPP and convergence of kinematic PPP for GPS,GLONASS and their combination were compared with each other by using the data processing software developed by the author.The PPP of numerical results show that:GPS,GLONASS and their combination have access to centimeter-level static and kinematic positioning accuracy,but the last is better than the former two in statistical accuracy and the GPS/GLONASS combination can improve the convergence speed of kinematic PPP,particularly prominent for the case of less observed GPS satellite.
GPS;GLONASS;precise point positioning;combination;statistical accuracy
1671-5942(2012)02-0105-05
2011-09-20
湖南省科技厅科研项目(2009RS3001)
王正军,男,1967年生,讲师,现主要GPS定位方面研究.E-mail:cslgwangzhengjun@sohu.com
P228.4
A