箱涵顶进置换管幕顶推过程自动测量技术研究*
2012-11-14潘国荣宋蕴璞李怀锋
潘国荣 宋蕴璞 李怀锋 张 鹏
(1)同济大学测量与国土信息工程系,上海 200092 2)同济大学机械工程系,上海 200092 3)现代工程测量国家测绘局重点实验室,上海200092)
箱涵顶进置换管幕顶推过程自动测量技术研究*
潘国荣1,3)宋蕴璞2)李怀锋1)张 鹏1)
(1)同济大学测量与国土信息工程系,上海 200092 2)同济大学机械工程系,上海 200092 3)现代工程测量国家测绘局重点实验室,上海200092)
结合上海金山既有铁路下顶进公路箱涵工程,介绍以自动全站仪为主的智能导向系统的原理及关键技术。实用表明,该系统在实际施工中具有可靠性强、系统运行稳定、测量精度高的特点,可以在恶劣的施工环境中正常运行。
城市地下空间;立体交通;管幕置换;箱涵顶进;自动导向测量
1 引言
目前,在地下立体交通空间结构施工过程中,一直采用的是人工测量方法[1],这不仅效率低,工作强度大,且精度难以提高。
为保证结构复杂的大型工程安全施工,迫切需要研究复杂条件下信息化测量技术。采用现代测量与定位信息化技术,可充分利用传感器的自动化和高精度的特点,解决大型地下工程中的测量速度和精度技术难题,实现数据的自动采集、传输、处理和表达。现代测量与定位信息化技术主要包括计算机、测量机器人等,将它们集成开发,可自动完成测量周期、实时评价测量成果、实时显示施工过程和趋势,与测量数据库管理系统相结合,可实现工程信息的现代化管理。
对此本文研究了复杂条件下工程测量与定位信息化技术,对复杂测量设备配套软件功能进行开发,研制出的自动测量及测量数据可视化管理系统,将测量数据库管理系统与复杂条件下自动测量技术相结合,解决了大型地下工程中的测量速度、精度等技术难题,实现了对工程施工进度、质量、安全的有效控制。
2 智能引导测量系统
2.1 控制系统的原理及硬件构成
箱涵顶进置换管幕顶推过程自动测量系统的定位原理是基于箱涵本身具有高度的整体性,故可将箱涵看成是一个刚体结构。如果在箱涵上测定不在同一直线上的3个空间点,根据3点可确定一个刚体在空间6个自由度的原理[2],箱涵的空间位置就可以完全确定[3,4]。
箱涵顶进置换管幕顶推过程自动测量系统的硬件是由自动全站仪、无线电台、电子计算机、棱镜及其他通讯接口等组成(图1)。
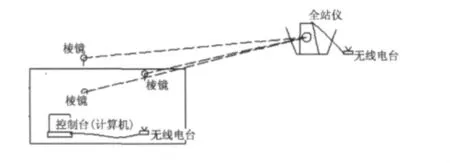
图1 系统的硬件结构示意图Fig.1 Sketch of the hardware structure of the system
自动全站仪通过RS232串口通讯线连接无线电台;一对无线电台通过RS232串口通讯线分别连接自动全站仪和电脑,每个还需要接通电源持续供电;测量计算机通过RS232串口通讯线连接无线电台,利用测量系统实时控制自动全站仪;3个目标棱镜需固定在箱涵上,不允许在箱涵顶推过程中位置出现相对移动。
箱涵顶进置换管幕顶推过程自动测量是采用自动全站仪作为数据采集传感器,实时测定固定于箱涵上的三个目标棱镜的空间点位坐标和角度方位信息;然后结合初始标定的目标棱镜三维坐标,根据三维直角坐标转换原理进行大角度非线性基准变换与处理,解算出箱涵首尾中心的三维坐标,与设计轴线对比,计算出箱涵首尾姿态偏差;最后将箱涵姿态偏差刷新显示在软件界面上,完成施工测量自动化。
2.2 软件设计
系统软件主要有3个功能模块:显示模块、数据模块和测量模块。
1)显示模块
如图2所示,主界面即是主要的显示模块,左边是箱涵姿态显示,右边是历史数据偏差轨迹显示。
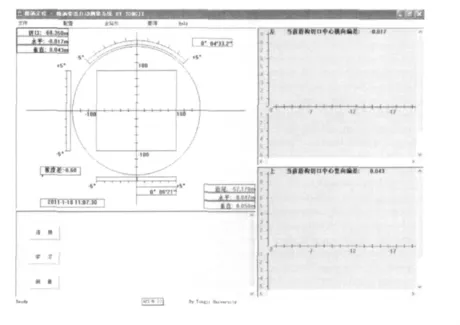
图2 箱涵框架顶进系统的界面Fig.2 Interface of box culvert jacking system
2)数据模块
数据模块功能主要集中在“配置”和“查询”两个菜单。“配置”菜单主要是输入设计数据和起始参数等信息,“查询”菜单提供历史偏差数据查询和最近的一次箱涵特征点坐标值查询。
3)测量模块
测量模块主要集中在“全站仪”菜单里,全站仪测量的一般过程为:连接仪器;设站测量;学习测量;自动测量(包括控制仪器转动到指定位置,ATR自动搜索,瞄准,测量获得数据)。另外,主界面左下方也提供了部分控制全站仪的快捷按钮,包括连接仪器、学习测量、自动测量和后视检核。
智能测量导向系统的软件包括必要的控制器的驱动程序和测量控制、计算处理、入库、显示等;包括自动启动全站仪功能,自动有规律地寻找目标棱镜、自动地观测目标及纪录数据的功能,自动地传输观测数据功能,自动地检查、处理、计算及评定计算成果质量的功能,并以图形或表格形式显示或打印结果。软件系统算法流程如图3所示。
系统定时进行自动测量,完成对全站仪的实时控制。
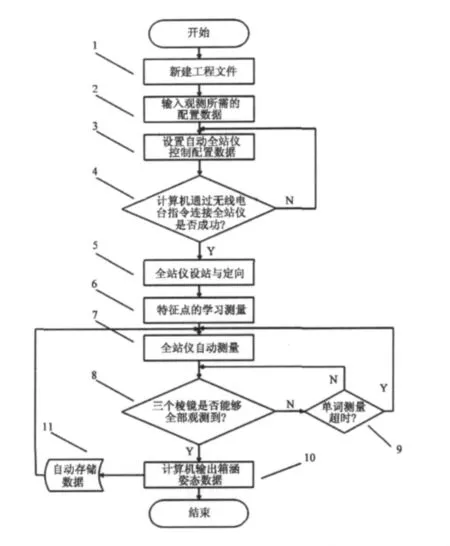
图3 系统软件的运行流程Fig.3 Flow chart of the system software
3 精度分析
试验中使用的智能全站仪测角精度为2″,测距精度为2+2 ppm。全站仪测算坐标的原理是根据测出的斜距、水平角和天顶距来计算的,公式为:
式中的xP、yP、zP为测站点的三维坐标,假定认为其不存在误差,所以根据误差传播定律,得到三维坐标的误差表达公式为:
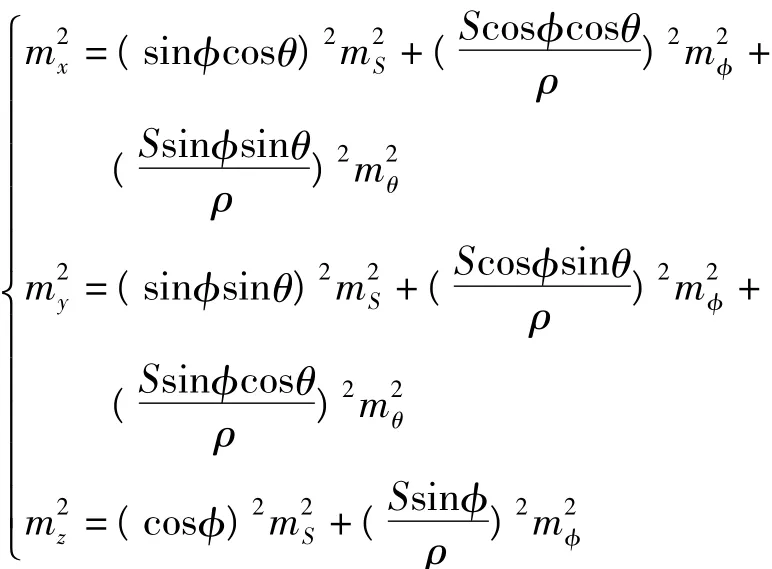
在施工中,一般测距不超过150 m,令S=150 m;在实际工程环境中,水平角0°≤θ≤360°;而全站仪的安装高度一般和棱镜的安装高度相似,而且箱涵顶进的坡度一般也不会很大,所以天顶距85°≤φ≤95°。
当φ=90°、θ=0°(θ=180°)或者当φ=90°、θ= 90°(θ=270°)时,存在最大的平面误差为mh=± 2.5 mm,竖直方向存在最大误差为mz=±1.5 mm。
4 工程应用实例
金山新建立交工程施工采用箱涵双重置换管幕工法,该法具有将箱涵法和管幕法结合的优点,即利用顶管法在工程箱涵所在位置施工工具管,全断面置换出土体,然后采用箱涵置换出工具管,最终通过双重置换过程,完成地下通道工程。该工法的主要流程为:基坑开挖→阀板制作→箱涵框架制作→管节顶进→箱涵框架顶进→U型槽施工→附属设施施工。其中管节顶进和箱涵框架顶进过程需要实时监控、做到信息化施工。对此,我们以管节、箱涵顶推全过程的有效监控为目标,重点研究管节顶进姿态、箱涵顶进姿态的引导与控制,实现管节、箱涵顶进精度满足要求。
在管节与箱涵的施工中,采用了我们研发的配套系统进行实时导向监控。表1为某管节顶进开始部分偏差数据;表2为箱涵顶进中某一姿态的数据。
自动测量系统对箱涵推进姿态可进行快速跟踪测量,系统每次测量3个特征点的时间不到一分钟。在施工中,测定箱涵的偏差精度达到毫米级精度。系统可视化程度高,通过自动测量得到箱涵姿态偏差,不仅方便施工人员纠偏,而且其里程信息和偏差可实时传递到地面控制室,方便掌握施工进程。
采用智能测量导向系统对管节和箱涵进行实时纠偏,在超大箱涵不利控制的条件下最终使横向误差及纵向误差控制在20 mm之内,从而保证了箱涵顺利贯通到位。
5 结语
智能测量引导系统在金山铁路与公路立体交叉实际工程的成功应用,充分体现出其优越性。这套系统具有如下明显的优点:
1)运行稳定性较好,可适应地下恶劣的测量环境;
2)测量精度高,测定箱涵的偏差精度达到毫米级,实现控制箱涵贯通误差厘米级[5];
3)由于在系统运行的控制软件中编写了许多自动纠错程序,系统容错性能很好,自动化程度高,如管道中人员走动及物体阻断测量视线虽会引起测量暂停,但计算机会显示视线被挡的信息,提示被阻挡的地方,因此可很快排除障碍物,一旦障碍物排除,自动测量系统便可自动进行测量;
4)高度智能化。结合进一步的软件开发,智能测量引导系统可以实现确保测量信息的可靠性,对施工过程的自动监测和评价,结合综合分析结果自动反馈纠偏信息,并兼顾工程运行安全等多种因素提供最佳纠偏量,达到智能化的要求。
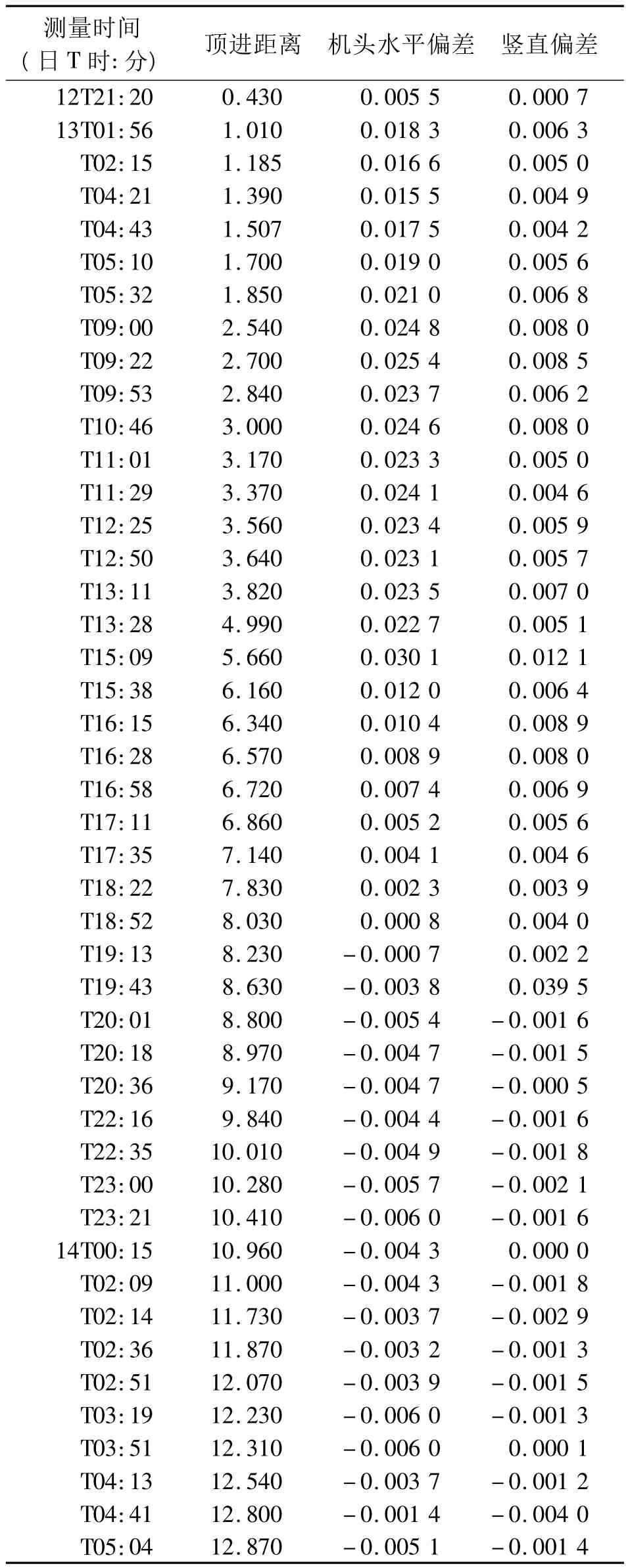
表1 某管节顶进开始部分偏差数据(单位:m)Tab.1 Deviation of a certain pipe jacking at the beginning (unit:m)
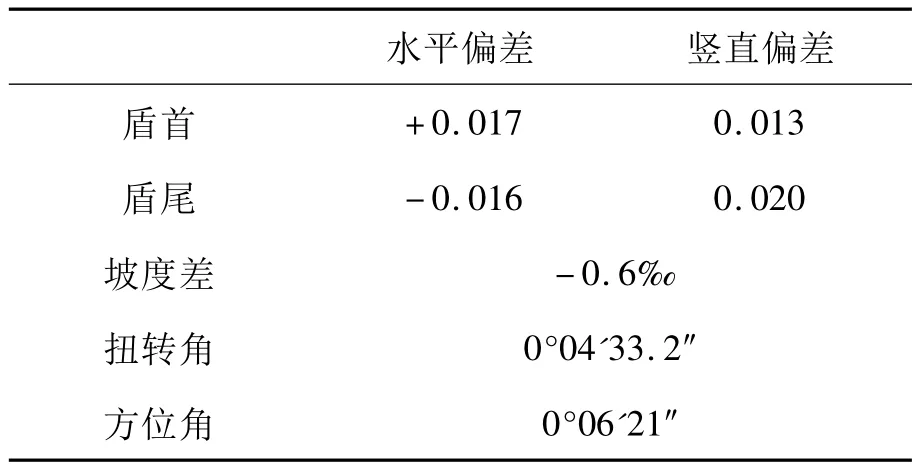
表2 箱涵顶进中某一姿态的数据(单位:m)Tab.2 An attitude data of Box culvert jacking(unit:m)
1 周文波.盾构法隧道施工技术及应用[M].北京:中国建筑工业出版社,2004.(Zhou Wenbo.Shield tunneling technology[M].Beijing:China Building Industry Press,2004)
2 潘国荣,周莹,张德海.坐标转换模型在盾构姿态计算中的应用[J].大地测量与地球动力学,2006,(3):84-87.(Pan Guorong,Zhou Ying and Zhang Dehai.3D datum transformation model for determining orientation of shield in subway construction[J].Journal of Geodesy and Geodynamics,2006,(3):84-87)
3 潘国荣,王穗辉.地铁盾构施工中的若干测量手段及方法[J].测绘通报,2001,(1):23-25.(Pan Guorong and Wang Suihui.Research on surveying methods in subway construction[J].Bulletin of Surveying and Mapping,2001,(1):23-25)
4 潘国荣,车建仁.城市地铁建设中的测量技术[J].江西科学,2006,(4):205-208.(Pan Guorong and Che Jianren.The measurement-technology in the construction of subway[J].Jiangxi Science,2006,(4):205-208)
5 潘国荣,王穗辉.上海地铁二号线隧道贯通定向技术及精度控制[J].同济大学学报,2000,(2):122-125.(Pan Guorong and Wang Suihui.Breakthrough measurement for Shanghai No.2 subway tunnel[J].Journal of Tongji University,2000,(2):122-125)
RESEARCH ON AUTOMATIC MONITORING TECHNIQUE OF PIPE REPLACED BY BOX CULVERT JACKING PROCESS
Pan Guorong1,3),Song Yunpu2),Li Huaifeng1)and Zhang Peng1)
(1)Department of Surveying and Geo-informatics,Tongji University,Shanghai 200092 2)Department of Mechanical Engineering,Tongji University,Shanghai 200092 3)Key Laboratory of Modern Engineering Surveying,SBSM,Shanghai 200092)
Automatic real-time guidance measurement is the key to modern construction measurement.Nowadays,in China the new underground 3D traffic engineering method of pipe replaced by box culvert jacking is used,but the manual measurement can not meet the requirement of real-time monitoring.So a set of Total Station-based intelligent automatic guidance system has been developed thus could achieve the measurement automatically and improve work efficiency greatly.The principle and key technology of this intelligent guidance system is introduced.In the same time,combined with successful application of culvert jacking highway in the existing railway project in Shanghai Jinshan,this system proved practical and excellent with higher reliability and accuracy.
urban underground space;3D traffic;pipe replacement;box culvert jacking;automatic guidance measurement
1671-5942(2012)02-0078-04
2011-09-07
上海市科委科研计划项目(10231200302)
潘国荣,男,1960年生,教授、博士生导师,主要研究方向为精密工程测量、工业测量与测量数据处理.E-mail:pgr2@163.com
P209
A