DMCⅡ数字航空摄影传感器性能改进及应用
2012-11-09王鑫姜挺
王鑫,姜挺
(信息工程大学测绘学院,郑州 450052)
1 引言
随着数字传感器技术的快速发展,数字航空摄影取代胶片式航空摄影已成为大势所趋,数字传感器面临前所未有的发展机遇。2000年在ISPRS阿姆斯特丹大会上,数字航空摄影传感器开始出现,2004年的伊斯坦布尔大会上传感器成为一个热点[1]。2008年北京大会上,各厂家更是纷纷推出换代产品。
大幅面的数字航空摄影传感器主要以两种方式发展,一种是基于三线阵的CCD推扫式传感器(例如ADS40/80);另一种是基于多镜头系统的面阵式传感器(例如DMC、UCX、SWDC),利用影像拼接镶嵌技术获取大幅面影像数据。
与线阵式相比,面阵式航空摄影传感器继承了传统胶片式航摄仪的成像方式和作业习惯,目前的数字摄影测量系统都能够兼容其工作方式,具体作业流程与传统航摄仪相比基本没有改变。因此,在目前引进的数字航空摄影传感器中,仍以面阵式成像方式为主流。
2 常用大面阵数字航空摄影传感器成像特点与性能分析
数字航空摄影传感器的核心元件是光敏成像元件CCD,面阵式传感器中的电荷耦合元件是以平面阵列的方式排列的,成像方式与传统的胶片方式类似。
现阶段摄影测量中所采用的大面阵数字航空摄影传感器有多种,代表性的有Z/I Imaging公司的DMC(Digital Modular Camera)、Vexcel公 司 的 UltraCamD(UCD)、UltraCamX(UCX)、UltraCamXp(UCXp),以及四维公司的SWDC等。
由于单一大面阵CCD的制造技术还不够成熟,且造价昂贵,目前大面阵航空摄影传感器主要利用多镜头、多影像拼接镶嵌技术来获取大幅面影像数据。如DMC、UCD/UCX/UCXp、SWDC均为多面阵传感器,由多个小面阵及镜头合成成像,在像方拼接成统一中心投影的大幅面影像。
2.1 DMC
卡尔蔡司公司(CarlZeiss)和德国鹰图交互计算机图形系统的子公司Z/I Imaging合作,在2000年推出了数字航空摄影传感器DMC。
DMC的镜头部分由8个镜头组成,具体排列方式如图1所示。4个全色镜头沿飞行方向按2×2矩阵排列,镜头与中心轴线方向均偏离一定角度,每个镜头对应一个大小为4096×7168像素的面阵CCD。全色镜头所获取的子影像间存在一定程度的重叠,子影像通过后处理和拼接之后生成模拟中心投影的虚拟影像[2]。4个多光谱镜头在全色镜头周围环绕排列,主光轴与中心轴线方向平行,多光谱影像与全色影像的覆盖范围相同,但分辨率较低。

图1 DMC镜头排列方式
DMC的部分技术参数如表1所示。
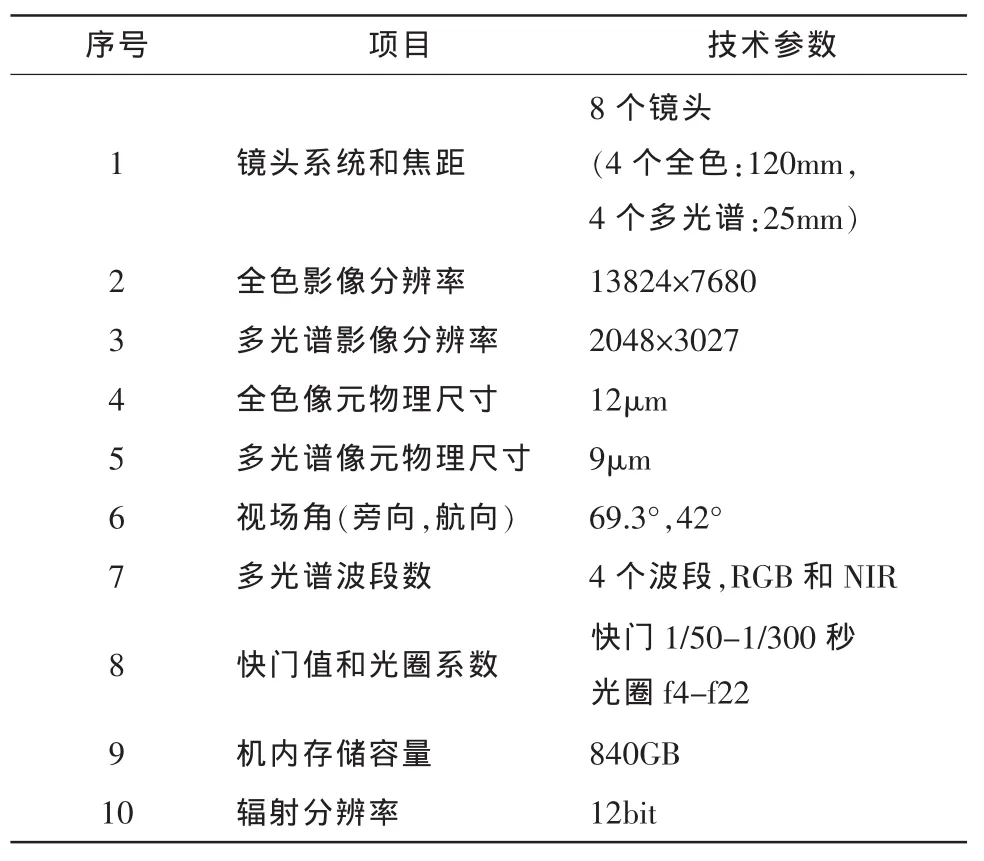
表1 DMC主要技术参数
2.2 UCXp
在北京召开的第21届国际摄影测量与遥感大会(ISPRS 2008 Beijing)上,微软威克胜公司(Microsoft/Vexcel)继UCD/UCX后又推出升级产品——UCXp。
UCXp共由13个面阵CCD构成,其大小均为5770×3770像素,其中由9个CCD的影像数据构成全色影像。UCXp的镜头部分由8个光学镜头组成,分三排排列,同时生成全色、RGB和NIR影像。图2为UCXp的成像过程示意图。4个全色波段镜头的排列方向与飞行方向一致。曝光时,当第一个镜头到达指定曝光地点,即对位于中心位置的面阵CCD曝光;第二个镜头到达相同位置时,对四角的4个面阵CCD曝光,同时R、B的波段镜头对其相应的2个面阵CCD曝光;第三个镜头到达时,对上下2个面阵CCD曝光,同时G波段和NIR波段镜头对其相应的2个面阵CCD曝光;第四个镜头到达时,对左右2个面阵CCD曝光。至此,所有13个面阵CCD的曝光全部完成[3]。

图2 UCXp的成像过程
UCXp全色镜头获取的9幅影像数据存在不同程度的重叠,经过后期的精确配准,可以合成为一幅中心投影影像。其详细技术参数见表2。

表2 UCXp主要技术参数
2.3 SWDC
SWDC数字航空摄影传感器是由中国测绘科学研究院研制的,具有自主知识产权的传感器系统。
SWDC最终生成的是模拟中心投影的虚拟影像。在虚拟影像生成过程中首先将单个倾斜摄影的子影像纠正为等效垂直摄影像片(水平像片),即水平纠正。水平纠正前后的影像如图3所示,然后利用水平像片重叠部分的同名像点,建立像片间的微小旋转、平移关系式,用自由网光束平差法精确求解各像片间的相对位置关系,最后将各个水平像片投影到最终的虚拟影像上。

图3 SWDC的成像过程
SWDC除具有一般数字航空摄影传感器的特性外,最大的特点是镜头可更换,35mm、50mm、80mm焦距正好对应传统23cm×23cm胶片式航摄仪的88mm、152mm、300mm焦距。SWDC的影像接近方形,视场角大,基高比大,提高了高程测量精度,能够满足大比例尺的常规航空摄影需要。其详细技术参数见表3。

表3 SWDC主要技术参数
3 DMCⅡ的性能改进
2010年,Intergraph公司在INTERGEO年会上推出了DMCⅡ数字航空摄影传感器。这种基于Intergraph Z/I技术的全新的数字航空摄影传感器包括DMCⅡ140,DMCⅡ230和DMCⅡ250三种产品,提供了数字传感器从低成本入门到高端的全部类型[5-7]。
与DMC相比,DMCⅡ具有像幅大、像元小、高颜色解析力、轻便以及宽量程数字移动补偿等优点,航摄的效率和质量得到明显提高。
3.1 成像方式的改进
由于大面阵CCD的制造技术还不够成熟,现有的面阵式数字航空摄影传感器一般为多镜头系统,采用多个面阵CCD,利用影像拼接镶嵌技术获取大幅面影像数据。由于各子影像是由不同的镜头及CCD获取,因而不同的子影像具有不同的投影中心,理论上也具有不同的系统畸变(例如镜头径向/切向畸变),由这些子影像拼合而成的“虚拟”影像是对中心投影影像的一种近似模拟,因此可能存在较为明显的系统误差[4]。如果对这些系统误差不做处理,就有可能在区域网平差过程中影响待解算的内、外方位元素,从而最终在物方空间造成较大的误差(特别是在高程方向上)。
DMCⅡ是第一台进入大批量工业生产并利用单CCD获取大幅面全色影像的传感器,每个颜色通道拥有独立的光学传感器CCD芯片,在后续的作业工序中无需进行系统误差的解算和消除,可以进行更快、更易、更精确的图像处理。
DMCⅡ的镜头由德国蔡司公司为其定制设计,其独立的全色(PAN)镜头实现了多年来胶片相机在基本光学设计原理上的单镜头大范围地面覆盖的最大设计视角。通过消除影响几何精度和辐射量的可能误差源,这种新途径形成的影像达到了所有测图和遥感应用的需求。基本的设计特征包括垂直投影(nadir-looking view)和单镜头中心投影(single lens projection center)。因而,DMCⅡ影像数据的后处理不需要CCD缝合和影像拼接。
DMCⅡ有五个正摄镜头,其中四个获取红、绿、蓝及近红外的多光谱影像,一个第五代高分辨率镜头获取全色影像。每个镜头都定制了一个特别的机载压力驱动快门执行自动自检校。这也确保了五个镜头在曝光周期里的动作达到最大的同步。
3.2 影像分辨率的改进
单面阵CCD传感器受物理尺寸的限制,使得影像分辨率较小,从而增加了航摄成本和后期处理的工作量。由于受制造工艺和成本方面的限制,现有的大面阵数字航空摄影传感器一般是利用多个小面阵CCD,采取影像拼接镶嵌的技术获取大幅面影像数据。DMC的全色影像获取采用了2×2矩阵排列的4个面阵CCD,影像分辨率为7680×13824像素。UCXp则采用3×3矩阵排列的9个面阵CCD来获取全色影像,其分辨率为17310×11310像素。
DMCⅡ的CCD由德尔萨公司(DALSA)专门定制,根据用户的需求可以选择不同的分辨率及像元大小。其中DMCⅡ140的像元大小为7.2μm,全色影像的分辨率为12096×11200像素;DMCⅡ230和DMCⅡ250的像元大小都达到了5.6μm,全色影像的分辨率分别为15104×14400像素和17216×14656像素。 其中DMCⅡ250的影像分辨率已经超过了现有的所有多面阵CCD传感器,在获取相同地面分辨率(GSD)影像的条件下,地面覆盖能力显著优于DMC。在飞行高度为500m时地面分辨率(GSD)可以达到2.5cm,能够在无需进行系统差改正的情况下为测图提供高质量影像,大大减少了后期处理的工作量。
3.3 其他性能的改进
DMCⅡ的影像与DMC相比具有更高的信噪比和辐射分辨率。1∶3.2的高融合比保证了高品质的彩色和彩红外影像,1.7秒超短曝光时间间隔满足多基线摄影,甚至是低空和高速情况下的大比例尺摄影测量要求。采用5cm的地面分辨率、168海里/小时的飞行速度可获得80%的航向重叠度。14bit的影像具有出色的辐射分辨率,即使在光照条件不好、存在阴影或曝光过度的情况下,仍然具有充足的影像信息。这些性能在现有的大面阵航空摄影传感器中都居于领先地位。
DMCⅡ还能够兼容现有的所有用于RMK TOP,DMC和RMK D的外围设备,包括Z/I Mission planning软件、Z/I Inflight传感器管理系统、固态硬盘存储器等。另外,DMCⅡ配备了一款新的接装板,能够安置更多不同型号的惯性测量装置。此传感器的兼容性也非常高,可以根据用户的需要进行升级,RMK D只需安装一个全色CCD模块及镜头就可以升级为DMCⅡ250。
DMC Ⅱ250的主要性能参数见表4[7]。

表4 DMCⅡ250主要技术参数
4 DMCⅡ在测绘生产中的应用前景
使用多面阵CCD传感器进行摄影时,由于CCD的尺寸问题,其获取影像的地面覆盖范围要小于传统航摄仪的地面覆盖,因此会使像对数增加,模型接边的工作量增加,从而增加内业工作量。DMCⅡ250的大幅面影像在一定程度上解决了这一问题。其中DMCⅡ250影像的影像分辨率已超过目前像幅最大的面阵传感器UCXp,与ADS40/80相比,能够有效减少航线数目约30%,可以充分利用航摄天气、有效提高航摄效率。传感器单个像元的尺寸达到了5.6μm,飞行高度为500m时地面分辨率(GSD)仅为2.5cm,且具有像移补偿功能(TDI),能够满足1∶500比例尺的成图要求,便于测绘大比例尺地形图。
由于不使用拼接影像,因而DMCⅡ获取的影像不再因为成像系统的不统一而存在系统误差,影像的几何精度得到了明显提高,其内外方位元素的解算精度也随之提高,地面点的量测精度也因此得到改善。
DMCⅡ可以获得高达80%的影像重叠率,利于进行多基线处理的航空数字影像测图,按多目视觉的理论,利用多重叠影像,增大交会角,从而提高高程精度,满足对地面点精度(尤其是高程精度)的需求。
获取全色影像的CCD利用14bit的A/D转换器,可以提供0-16383之间的灰度影像。高辐射分辨率使其对海岛礁这一类具有大片水体,景物反差强烈的地区摄影时,能够获取更丰富的影像信息,同时也为后续的影像匀光处理工作提供了便利,有利于生成大范围色彩均一的正射影像。
摄影测量中,为了获取位置姿态信息,传感器在摄影时需搭载高精度的POS设备。DMCⅡ的硬件设计使其能够安置更多不同型号的惯性测量装置,便于用户根据需要进行选择。
另一方面,由于框幅式影像的自身特点,在进行航空摄影时,如果整个摄区内存在的水域面积过大,则易出现像主点落水的情况,在内业中需要增加额外的控制点数量,以提高量测精度,对空三加密和测图都有不利影响[8]。所以,DMCⅡ在海岛礁测绘中更适用于近海区域,岛屿密集、连通性较好的情况。
5 小结
本文对目前市场上三类主流大面阵航空摄影传感器的性能和特点进行了比较,在此基础上对DMCⅡ的性能改进进行了分析研究。
每种传感器由于不同的设计思想,必然导致产品间存在各种差别,单纯从某一方面决定其优劣是不可取的。作为传感器的使用者,应该根据工作目的,权衡每种产品的利弊,选择最能满足工作任务的仪器。综合地利用各种产品的优势,才能更好地推动航空摄影测量的发展[9]。
[1]张祖勋.航空数码相机及其有关问题[J].测绘工程,2004,13(4):1-5.
[2]余咏胜,游宁君.数码航摄像机——传统胶片航摄像机的替代者[J].测绘通报,2005(3):6-10.
[3]Schneider M,Gruber M.Radiometric Quality of UltraCam-X Images[C]//ISPRS,2008.Part B1,PP539-544.
[4]AlamúsR,KornusW,Talaya J.DMC Virtual Image Characterization:Experiences at ICC[C]//ISPRS,Beijing,2008.Part B1,PP515-520.
[5]DMC Ⅱ140 Camera System[G/OL].http://www.Intergraph.com.
[6]DMC Ⅱ230 Camera System[G/OL].http://www.Intergraph.com.
[7]DMC Ⅱ250 Camera System[G/OL].http://www.Intergraph.com.
[8]王鑫,申家双,姜挺.海岸带、岛(礁)数字航空摄影传感器性能及选型研究[J].海洋测绘,2011,31(1):61-64.
[9]韩磊,蒋旭惠.几款数字航摄相机的应用与比较[J].城市勘测,2006(5):21-23.
