女子单人花样滑冰旋转技巧助滑动作技术运动学分析
2012-11-09卢景波倪维广
卢景波,倪维广,杜 磊
(吉林大学体育学院,吉林长春 130021)
女子单人花样滑冰旋转技巧助滑动作技术运动学分析
卢景波,倪维广,杜 磊
(吉林大学体育学院,吉林长春 130021)
对2011中国杯世界花样滑冰大奖赛过程进行定点拍摄,从中挑选3名助滑技术动作具有代表性的世界优秀选手作为研究对象,利用SIMIMOTION生物力学分析系统对3名运动员联合旋转前的助滑技术动作进行解析。结果显示:支撑脚滑行时须领先于重心,其滑行轨迹应具有一定的弧度;运动员重心在进入旋转点前应适当降低,积累势能;助滑阶段应充分利用摆动腿的摆动作用,身体其他部位相应配合。
花样滑冰;旋转;助滑;运动生物力学;训练
花样滑冰的旋转动作在运动员的比赛成绩中占有重要分值,是比赛取胜的关键因素之一[1]。从目前看,国外许多优秀选手利用旋转技巧和姿态变化进行艺术表演方面明显强于我国选手,特别是在新的比赛规则实施后,运动员普遍提高了对旋转技巧在比赛中运用的重视程度[2]。要想取得更加完美和优异的成绩,必须高度重视和挖掘我国运动员在旋转技巧方面的潜力[3],使其在旋转速度、姿态变化和控制旋转重心稳定性方面都能得到全面和快速的提高。助滑动作是动作之间的基本连接方式,是形成旋转的动能来源,良好的助滑会使运动员获得一个好的转动惯量和合理的身体姿势,从而很好地完成旋转动作[4],因此对进入旋转之前的助滑动作技术进行研究具有积极意义。
1 研究对象与方法
1.1 研究对象
对2011中国杯世界花样滑冰大奖赛中10名优秀女运动员进行比赛录像和观察,挑选其中技术动作具有代表性的3名运动员进行定量的解析(表1)。
1.2 研究方法
使两台松下摄像机,从不同方向对2011世界花样滑冰大奖赛中国上海站比赛部分参赛运动员进行拍摄,摄像机两主光轴夹角约70°,机高1.3m。拍摄时采用内同步,拍摄频率为50Hz。使用大范围的三维标定。运动员比赛后,在标定平面范围内挑选图像范围内尽量靠近运动员完成动作的4处定点作为固定点,移动标定框架进行拍摄。从拍摄录像中截取与运动员完成动作时对应范围的图像作为标定图像进行解析。标定空间范围长为40m、宽为25m、高为2.5m。实验检验标定精度误差低于2.5%。首先经过定性分析,挑选具有代表性的助滑技术动作,再使用SIMIMOTION系统对所挑选的技术动作进行解析,采用松井秀治模型计算人体各参数。原始数据平滑处理采用低通滤波平滑,截断频率为6Hz,提取数据在EXCEL中建立数据库,之后对数据进行分析整理。
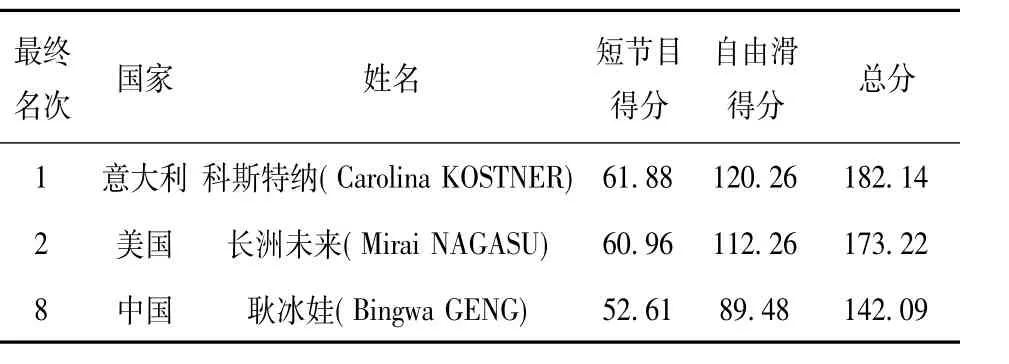
表1 2011—2012国际滑联花样滑冰大奖赛(中国站)部分队员情况表
2 研究结果与分析
为了便于分析,本研究暂把助滑阶段定义为运动员联合旋转前从支撑脚放在冰面开始(此时开始,运动员支撑脚在冰面会滑出弧线轨迹准备进入旋转点。)到支撑腿开始旋转后膝关节伸直为止;Z轴垂直于X轴与Y轴所在的水平面,X轴为助滑时的主滑进方向。
根据运动生物力学原理:有支撑状态下加大人体转动效果的方法主要有三种,即平动位移运动时身体某点被制动;获得必要的偏心推力(冲量矩)和利用身体或局部肢体储备动量矩向特定部位转移[5-6]。花样滑冰的旋转技巧要求运动员在考虑节奏的基础上旋转得要快、要稳、并且姿态优美,助滑阶段的动作是否合理则很大程度上会影响到整个后续的旋转质量。科斯特纳、长洲未来、耿冰娃分别为在比赛中助滑动作完成得好、较好、较差的3名运动员,表2显示3名队员旋转动作的部分转动参数。
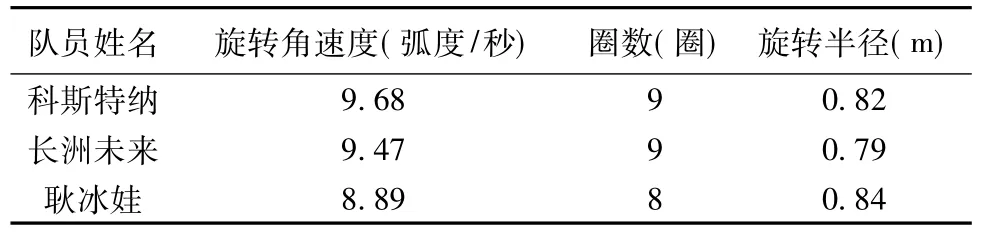
表2 3名队员助滑后所获得的部分转动参数
2.1 助滑阶段支撑脚移动轨迹分析
科斯特纳由摆动脚离开地面到支撑脚滑行到旋转点用时0.44s,长洲未来用时0.40s,而耿冰娃则用时0.36s,优秀选手完成此动作所用的时间普遍较长。科斯特纳在X轴的位移为1.57m,在Y轴的位移为0.98m;长洲未来在X轴的位移为1.19m,在Y轴的位移为0.93m;耿冰娃r在X轴的位移为1.8m,在Y轴的位移为0.75m。从以上数据分析,运动员要想获得较好的旋转效果,除了要考虑由助滑带来一个好的初速度,还要考虑身体的稳定性。科斯特纳获得了一个较好的助滑距离,从而获得了较好的初速度,也在Y轴的移动范围中保证了自身对身体姿势的控制,从而在稳定中把助滑的初速度很好地转化为转动惯量。

图1 科斯特纳助滑阶段支撑脚移动轨迹
在选手到达旋转点后,科斯特纳对身体的控制接近完美,其在X轴与在Y轴的位移变化不大,接近稳定状态,保证了她在旋转范围内完成动作,避免了因控制身体姿势而浪费旋转势能。通过图2可知长洲未来的身体姿态也趋于稳定,其在X轴和Y轴的位移变化较小。而通过图3可知耿冰娃在进入旋转点后在旋转过程中其支撑脚明显处于不稳定状态,其在X轴与Y轴的位移有较大变化。分析其原因应为其助滑轨迹过于平直、弧度较小,急于利用助滑动力进入旋转状态,使身体姿态不稳定。
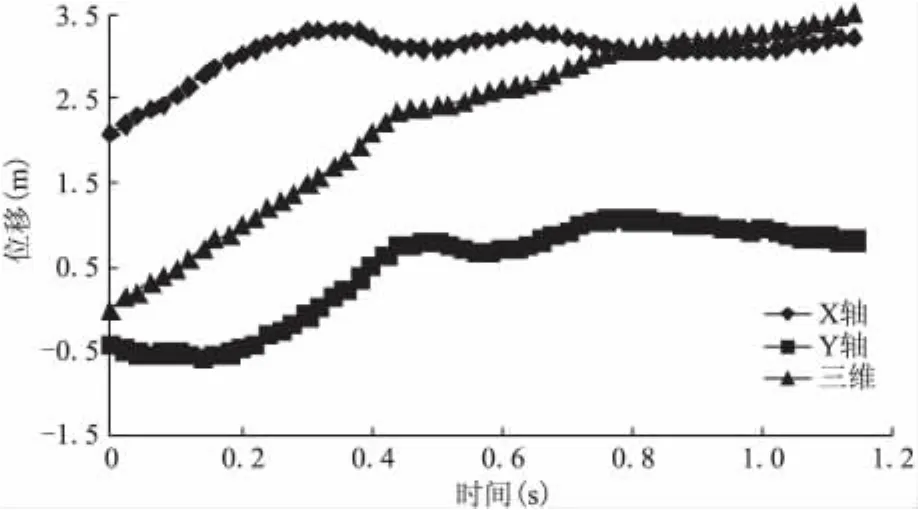
图2 长洲未来助滑阶段支撑脚移动轨迹

图3 耿冰娃助滑阶段支撑脚移动轨迹
2.2 助滑阶段身体重心移动轨迹分析
所有滑行类的运动项目都强调运动员合理地利用体重来蹬冰(地),其实质就是分析运动员身体重心的位置及其与支撑脚的位置关系。
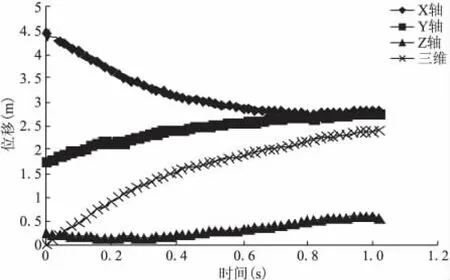
图4 科斯特纳助滑阶段身体重心移动轨迹
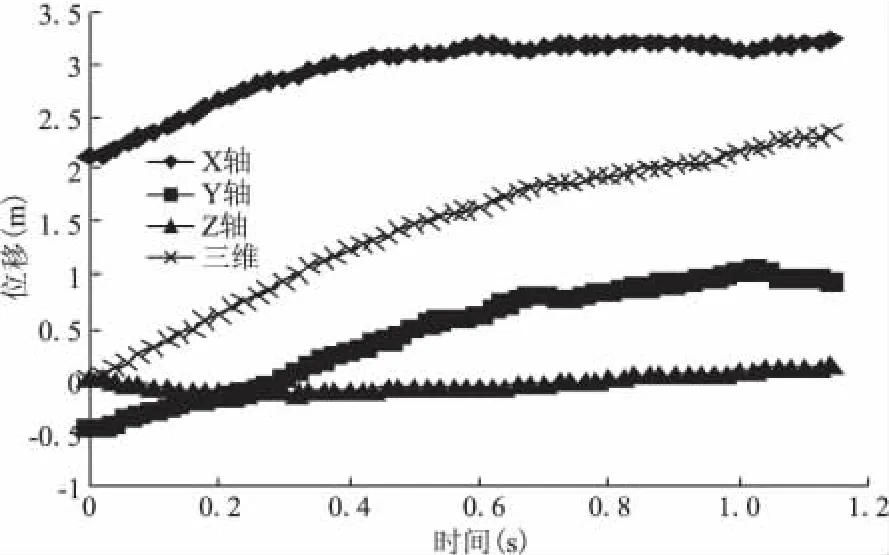
图5 长洲未来助滑阶段身体重心移动轨迹

图6 耿冰娃助滑阶段身体重心移动轨迹
通过图1对图4、图2对图5、图3对图6对比分析运动员的支撑脚与重心的位置关系,在助滑阶段运动员的支撑脚与重心的位移曲线基本一致,在接近助滑结束段重心的位移数值均小于支撑脚位移数值,之后重心投影点落在支撑脚移动轨迹的圆中;而前大半段时间内都是支撑脚领先于重心移动,重心更靠近滑行曲线的圆心,由之前形成的惯性帮助运动员进入旋转状态,运动员重心投影点落在支撑脚在滑进方向的后面。在此阶段支撑脚移动曲线比重心移动曲线的斜率更大,支撑脚积极前移再迅速形成制动,为旋转提供必要条件。
对图4、图5、图6对比分析发现,长洲未来在刚进入旋转状态时重心快速跟进,保证身体重心与支撑脚更接近在同一身体纵轴线上,以利于旋转,但由于冰刀、冰面及身体姿态的原因,其在纵轴的投影点不能达到完全吻合的理想状态;运动员的重心在Z轴上的运动轨迹都呈现高—低—高的变化规律,但科斯特纳在助滑的起始阶段重心就保持相对偏低的状态,随后再稍有所下降,保持此重心的身体姿势接近旋转点,随着身体进入旋转状态,重心快速而稳定的提高。耿冰娃在整个进入旋转点的过程都是重心下降的过程,不利于身体控制,也是支撑脚提前制动的一个表现。
2.3 助滑阶段身体姿势变化分析
旋转速度是由起转瞬间的角动量矩所决定的。因此在旋转动作起转时,运动员要尽可能的获得最大的动量矩。一方面可加大肢体末端运动制造更大的惯性,另一方面充分发挥身体肌肉的内力,调节身体姿势,形成大的转动惯量[7-8]。
2.3.1 运动员支撑腿膝关节、髋关节角度变化分析 在旋转技术助滑阶段,良好的制动能够为选手创造更好的旋转初速度,而良好的制动需要有合理的身体姿态,尤其是支撑腿一侧身体肌肉的控制对身体的协调及后续力量的发挥都起到至关重要的作用[9]。

图8 长洲未来支撑腿膝关节、髋关节角度变化图

图9 耿冰娃支撑腿膝关节、髋关节角度变化图
运动员在助滑阶段髋关节与膝关节变化基本一致,但其大小变化所出现的时机很大程度会影响后续旋转动作势能的储备。运动员摆动脚离开冰面支撑腿膝关节与髋关节角度减小,接下来的0.12~0.18s,其支撑脚滑行方向发生较大改变,即绕弧滑行,此时其膝关节与髋关节角度逐渐增大。协调能力较强的运动员会在此基础上能够很好的控制身体姿态,继续稳定的加大膝关节与髋关节的角度。而能力较差运动员会有一个先缓冲较小膝关节与髋关节角度的过程,之后进入旋状状态再慢慢伸直膝关节,在缓冲阶段,运动员能够更好的形成制动,但会相应的减少滑行势能。如提前制动缓冲,即屈髋屈膝也可加大对摆动腿势能的积累。
2.3.2 运动员摆动脚、肩、及手的速度变化分析 根据公式:I=Mk2分析运动员动作质量存有差别的原因,一方面是就运动员个人而言,下肢的质量肯定大于上肢的质量;另一方面下肢的环节重心离身体的转动轴的距离要大于上肢环节重心离身体转动轴的距离。

图10 科斯特纳助滑阶段摆动脚、肩、及手的速度变化图
由图10、11和12可知:在进入旋转点前,科斯特纳的动作合理,在保持身体正常旋转惯性的基础上,重点利用摆动腿和对侧上肢的摆动来加大旋转速度。摆动脚最大速度为14.4m/s,对侧上肢协调配合,曲线方向几乎吻合,且其他身体环节动作节奏变化均匀,有利于加大身体的转动惯量。长洲未来明显利用摆动脚的摆动来获得惯性,瞬时速度达到18.2m/s,但节奏变化突然,不利于转动势能的积累。其他身体部位速度数值均较低,说明在完成此阶段动作时基本处于惯性状态,没能发挥加速摆动的作用。耿冰娃整个助滑时间只有0.94秒,动作完成得太突然。且在短时间完成动作时,摆动腿的摆动时机过晚,虽然瞬时速度达到15.9m/s,但摆动腿同侧的上肢形成了副作用,降低了摆动腿的正常作用。有意加大其他身体部位的作用,不利于整个身体协调完成动作,虽然在随后的动作中进行纠正和调整,但已影响旋转速度。

图11 长洲未来助滑阶段摆动脚、肩、及手的速度变化图

图12 耿冰娃助滑阶段摆动脚、肩、及手的速度变化图
3 结论与建议
1)运动员在助滑行进训练中,在考虑尽可能地获得最大的旋转初速度的同时,还要考虑身体姿态的控制,支撑脚的滑行轨迹不能过于平直,根据不同的速度存在理想的弧度。
2)运动员的支撑脚在滑行方向上领先于身体重心,直至身体开始旋转。优秀运动员的支撑脚在接近旋转点时应积极前伸,同时屈膝降低重心,为身体制动形成好的力学基础。运动员身体重心在垂直轴方向应尽量在到达旋转点前完成降低以积累势能,随后逐渐提高身体重心,直至进入旋转状态。
3)运动员应在助滑阶段加大对摆动腿的练习。在进入旋转状态前积极主动加大摆动腿的摆动,摆动腿对侧的上肢应做出相应的配合。运动员可在练习中遵循循序渐进的训练原则,先只注意对摆动腿的练习,再结合控制对侧上肢肌肉的练习,避免协同肌群相互对抗。
[1]赵金平.目前我国花样滑冰存在的主要问题及其对策[J].冰雪运动,2004(3):16-17.
[2]栾 波.中外花样滑冰选手自由滑对比研究[J].冰雪运动,2005 (2):17-18,30.
[3]黄丽坤,孙 毅,赵金平.我国女子花样滑冰与世界水平相比的主要差距[J].冰雪运动,2004(5):29,81.
[4]沙延威,曹宪明.2005年世界花样滑冰大奖赛中国杯冰舞技术分析[J].冰雪运动,2005(4):28-32.
[5]纪仲秋.运动生物力学[M].北京:高等教育出版社,2001.
[6]冰雪运动教材小组.冰雪运动[M].北京:人民体育出版社,2000.
[7]John Malone.The Encyclopedia of Figure Skating[M].Facts on File,1998.
[8]艾康伟,何申杰,何 伟.运动技术大范围三维运动学分析[J].体育科学,2002,22(4):135-137.
[9]张海威.中外女子单人花样滑冰联合旋转的对比研究[D].长春:吉林体育学院,2010.
Kinamatical Analysis of Spin Approach in Women’s Single Figure Skate
LU Jingbo,NI Weiguang,DU Lei
(P.E.School of Jilin University,Changchun 130021,Jilin,China)
The competition event in Shanghai of the 2011 China cup World Figure Skating Competition was statically shot and some representative techniques are taken as the main subjects.The advanced SIMIMOTION is adopted to analyze the action of approach and bodily data.Analysis from the data:track of support foot,movement track of gravity,velocity of the limb end and the hip joint and knee joint.The results show that the supporting foot leads the gravity center,and its trace is expected to have some curve;the body gravity center should be lowered to some extent in order to accumulate energy;the swaying leg should be well used in the spin approach with coordination of the rest limbs.
figure skating;spin;approach;biomechanics of sports;training
G804.6
A
1004-0560(2012)04-0067-04
2012-05-15;
2012-06-25
国家体育总局冬季项目管理中心课题:花样滑冰旋转技巧与艺术表演综合研究(07137)。
卢景波(1963-),男,副教授,主要研究方向为体育教学与训练。
责任编辑:乔艳春
◂运动人体科学
