海底观测站的两种发展模式
2012-11-06李慧青
李慧青,李 燕,哈 谦
(国家海洋技术中心 天津 300112)
海底观测站的两种发展模式
李慧青,李 燕,哈 谦
(国家海洋技术中心 天津 300112)
文章简要介绍了海底观测站的历史。阐述了这一发展过程中存在的两种模式及其基本要素,对两种模式的投入成本、功能与效率及其未来发展做了比较,以期对我国未来的海底观测站/系统的建设有所借鉴。
海底观测;光电缆组网;模式
人类在地球上居住,就必须了解地球,而了解地球是从对地球的观测开始的。假如把地面与海面看作地球科学研究的第一个观测平台,而把空中和空间看作第二个观测平台,那么近年来海底就成为地球科学研究的第三个观测平台[1]。
在第三个平台上进行的地球科学观测活动是从20世纪50年代前后开始的,从90年代以来取得了快速的发展。1995—2002年期间,欧盟先后实施了两期地球物理学和海洋学深海研究站计划;1998年开始,美国与加拿大合作,组织实施了东北太平洋海底网络实验计划。通过这些项目的实施,以期对各个观测点实现自动、长时序观测,从而获得曾经是“深不可测”的海洋内部信息。
海底观测区别于海面和空间观测的特点是,难度大、费用高、结果具有不确定性。因此,以什么方式和规模来发展海底观测是需要科学界、政府和社会等多方面统筹考虑和协商的系统工程。在回顾海底观测发展历史的基础上,对单框架式海底观测站和光电缆组网式海底观测系统的优缺点及发展方向进行了分析,以期对我国未来的海底观测站建设有所借鉴。
1 海底观测发展史
海底观测大致可分两类:一类是以海底地震和地质构造及其变化研究为主的对海底的观测;另一类是以海洋学、海洋生物学、海洋生态动力学等研究为主的在海床上进行的对水体的观测。总的趋势是,在海床上利用观测仪器设备对海床以下的地质构造和海床以上的水体、生物及生态进行综合的观测和研究。
海底观测最早的主题是地震。早在1937—1940年间,美国W.M.尤因等就进行过海底地震观测的尝试[2]。1966年,曾在千岛群岛至堪察加的近海,安装了18台地震仪,进行了3次地震观测。1968年,日本利用新研制出的海底地震仪,在海底进行了33d的持续观测;1968—1970年,在相模湾的3个地区进行了海底地震的系统观测。1966年,莫斯科大学研制了海底地震仪,并在印度洋进行了海底地震观测[3]。
最早的大规模洋底调查观测活动是大洋钻探计划,它起源于1961年的美国莫霍计划。1968年开始深海钻探计划DDP(Deep-Sea Drilling Project,1968-1983),之后又相继实施了大洋钻探计划ODP(Ocean Drilling Programme,1985—2003)和综合大洋钻探计划IODP(Integrated Ocean Drilling Programme,2003—),这是国际地球科学历时最长、规模最大的合作研究计划。从1968—2003年,35年来在全球各大洋钻井近3000口,从北极大洋到南极威德尔海,覆盖了整个世界大洋,采集了沉积样品和岩石标本,记录了钻孔地球物理和地球化学信息,建立了长时间尺度的岩芯观测。“综合大洋钻探计划”(IODP)计划打穿大洋壳,揭示地震机理,查明深部生物圈和天然气水合物,并从地质变化中理解极端气候和快速气候变化的过程[4]。
上述各种海底观测活动的共同点是:它们都是在洋底进行的点上观测,即通过钻孔取样和在钻孔中布放仪器进行定点观测。然而,从海洋科学基础研究的目的出发,例如探索海洋气候变化对不同水深海洋生物产生的不同影响,探索深海生物的生态系统动力学和生物多样性等,还需开展对海洋乃至海底的物理、化学和生物量的观测,如海洋的流、浪、潮等动力参数,海底的结构构造参数和海洋的pH、二氧化碳、溶解氧、营养盐和蛋白总量等化学和生物量参数。而从开发海底资源的目的出发,海底观测系统还需要研究并弄清以下3个方面的问题:一是研究矿物生长与发展,如热液硫化物的生成机理研究;二是开展面向生物资源开发的特定地区生态系统研究,如热液生态体系的研究;三是进行大洋资源开发过程及其后续过程的环境变化监测,从而避免资源开采过程对海洋环境带来的不良影响。
综合实现上述各种科学目的,就需要将观测仪器设备布放到海底去,并将设在海底和埋在钻井中的监测仪器联网,进行长时间连续的自动化观测。这种观测网既能向下观测海底和大洋深部,又能通过锚系向上观测大洋水层,还可以投放能自动与观测网的节点连接上网的活动型深海观测站。科学家可以通过网络,在陆基实验室内实时或近实时地观测自己的深海实验项目,指令实验设备对风暴、藻类勃发、地震、海底喷发和海底滑坡等各种过去很难及时观测的突发灾害事件进行过程跟踪监测。
因此,从20世纪90年代开始,随着海洋和海底科学的发展,海底观测开始由点向面的发展,目前正在向立体、四维的方向迈进[5]。国外海底观测站的主要模式有单框架式和光电缆组网式两种,根本区别在于数据的实时通信能力和持续观测能力。
2 单框架海底观测站
单框架海底观测站是指一套相对独立的、不依靠光电缆由岸基站供电和通信的海底观测设备。采用单框架海底观测站开展海底观测和实验研究的国家主要在欧洲。此处介绍欧盟资助的GEOSTAR系统[6],这一系统由3个部分组成:海底站、有缆机器人和通信系统。
2.1 海底站
观测仪器设备安装在耐海水腐蚀的金属框架内,工作深度4000m。仪器设备包括:①传感器和仪器;②由钛盒封装的电子系统和储存数据的硬盘;③通信系统的水下部件;④锂电池电源。锂电池的使用寿命目前可达1年以上,发展方向是锂电池可以由海表面的能源浮标进行充电。数据采集和控制系统单元DACS(data acquisition and control system unit)是一个数据获取和控制中心。GEOSTAR DACS能完成以下任务:管理和获取来自于所有学科包和传感器的数据;制备和连续升级根据要求即将发出去的经常性数据信息,包括事件的侦查结果;驱动收到的指令(例如,数据请求、系统重构、重新启动);在内存备份数据。DACS管理大量的、取样速度完全不同的数据流,按照高精度时钟确定的独特的参考时间标记每个数据。传感器选用24V、350mA以下的低能耗产品。
2.2 辅助设备
一种用于水下科学目标的遥控作业机器人MODUS(mobile docker for underwater sciences),专用于布放和回收海底观测站。通过一条专用的光-电缆在船上遥控它,并为它提供能源。MODUS输送系统运行过程中需要的货物,其测量记录系统在布放期间也是观测站的初始通信线。它装备了锁紧/释放和推进器,推进器装在一个圆锥体的框架上,这样有助于对接。目前装备了4个推进器,包括2个水平向、2个竖直向推进器。框架上还装备了用于侦查海床的录像机、异频雷达收发机、指南针、深度计和声呐。
2.3 通信方式
有两种独立的通信方式:一种是浮式数据盒,当数据已经满负荷或遇到紧急情况时,它会自动或接受指令浮到海面。这种数据盒又分两种,一种是消耗式的,数据储存容量64kB;另一种是储存式,数据存储容量为40MB,通过Argos卫星定位通信系统传递其位置信息和数据。另一种通信方式,是基于双向垂直声通信原理的机会船联络或浮标联络,频率12kHz,速度可达到2 400bit/s。
3 光电缆组网的海底观测站
世界各地已经建立了一些不同规模和用途的光电缆海底组网观测站。此处以美国近海试验场蒙特利湾加速研究系统(monterey accelerated research system,MARS)为例,介绍光电缆组网式海底观测站的基本要素[7]。
3.1 海底站
MARS光电缆的末端是一个由防拖网大钢架保护的观测设备,高约1.2m,宽4.6m。这种防拖网框架为MARS观测台的电子仪器“内脏”提供了保护。框架的四面各有一个门,允许ROV(remote operated vehicle)连接端子进出(图1)。观测台成为深海中的电脑网络中心和电力变电所,其工作深度900m。
电子仪器“内脏”由两个钛质压力容器组成,悬接在一块浮体之下。一个容器内部是电子设备,用于路由数据和仪器的电源控制;另一个容器相当于变电站,将高压电转化成适用于科学仪器的低压电。
Mars电缆将由岸基站提供的10kV的高压电输送到学科节点处。在学科节点内部转换器将电压降到仪器可接受的375V交流电和48V的直流电。共有学科节点8个,利用它们,每个试验可以发送高达100Mbits/s的数据给陆地科学家,科学家也可以反过来发出修改程序、重装仪器的指令。
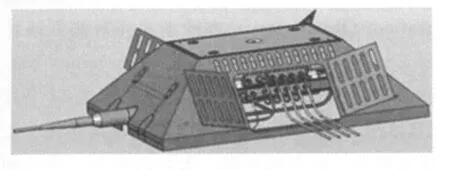
图1 MARS海底站及其钢框架
3.2 辅助设备
52km长的光电缆为系统提供电源和通信。有了持续不断的电力供应,MARS观测台上的仪器就可在海底持续观测数月甚至几年。通过实时通信网络系统,建立数据获取/管理以及系统控制。如果某台观测仪器出了问题,科学家就会及时发现。如果是程序方面的问题,可以由工程师进行远程修复或重新设计程序;而修复或重新设定子系统或仪器,则需要水下机器人进行现场作业。
3.2.1 光电缆
光电缆本身由一个铜质电信号传线和一组光纤组成,比一根普通的软胶管稍粗。这些光电缆铺设时埋在深约1m的海底沟槽内,以防被船锚、捕鱼装置等钩挂。铜质导线以10kW的功率将位于加州的陆地站上的电力传送给海底的设备,而光纤则以2000Mbits/s的速度把这些科学仪器所采集的数据传送给岸基站上的研究人员。
3.2.2 机器人
有缆机器人Ventana负责海底站的安装,负责在科学节点上安装、回收、修理观测子系统或仪器。
自治机器人Benthic Rover扩大了海底观测范围。它有自己的电池系统,可完全独立行驶,也可用一条长长的延伸线与海底观测站相连,得到电力补充和数据中转。Benthic Rover的钛制耐压球用来保护机器人的核心——电子部分和电池。为了避免机器人太重而陷入海底的柔软淤泥中,采用抗压浮力材料,因此,机器人在空气中的重量约1 400kg,在水中的重量仅为45kg。机器人前端安装两把旋转刷子,用于清理履带上的泥土;机器人行驶过程中会搅起海底沉积物,扰乱视线,影响测量工作,因此,它行动极为缓慢——约1m/min。此外,机器人还能感应水流的方向,自动顺着水流方向前行,有效避免激起的泥沙影响。
4 两种模式的发展趋势
4.1 应用单框架海底观测站进行的海底观测研究
自Geostar欧盟第4、5框架项目开发出来后,工作向两个方向延展:一是单套观测站特殊应用;另一是将Geostar升级为一个海底观测网的基本节点。这两个方向的发展已经产生了另5种Geostar级的观测站,形成了欧洲深海底观测网的雏形[6]。
2000—2002 年,在意大利沿海建立了海下1号观测网站SN1(submarine network 1),主要开展地震、海洋学和环境海洋学方面的监测。2005年利用欧洲中微子海底望远镜工程,即中微子地中海观测站NEMO(neutrino mediterranean observatory)的光电缆系统的能源和通信渠道,为NEMO提供海洋环境实时监测,成为欧洲第一个光电缆式海底观测站。
2002—2004 年期间,甲烷气监测模块GMM(gas monitoring module),作为欧洲的能源、环境和可持续发展项目“地质灾害长期海底观测传感器阵列”中的子项目,专门长期监测海底甲烷。
欧洲的ORION-GEOSTAR-3(2002-2005)项目,以一个位于水下3300m的GEOSTAR为主要节点,加上1km之外的观测站以及一个近岸的水深44m的副节点观测站,组成一个多参数海底观测系统。
意大利出资,建立了南极多学科深海底实验室(multidisciplinary antarctic benthic laboratory,MABEL),环境条件为空气温度-15℃,冰水温度-2℃,开展了多参数监测试验。
欧盟资助的Cadiz海底观测站,将传感器直接安置在3200m深的地质构造重要位置,以监测板块运动。传感器系统装备了新颖的海啸监测仪,一旦传感器系统有反应,可立即发出海啸警报。
4.2 应用光电缆组网海底观测站进行的海底观测研究
目前由光电缆连接的海底观测站,结构较完整、观测项目较综合的是美加合作的NEPUNE。加拿大承担的部分是Neptune Canada,其中的4个海底观测站已开始工作,最深在400m,而仅用于地震、海啸观测的平台在水深2 660m。
已经开展的研究项目有[8]:①Barkley Canyon海区水合物起源;②近海海洋过程中生物物理的内在关联;③Bullseye Vent海区可燃冰地质物理图像研究;④水体搅动对深海生态系统的影响;⑤海沟热液系统中热与质通量和生物化学、物理过程相对应热与质波动反映的综合观察;⑥大洋壳体水文地质研究;⑦加拿大海王星地震仪网;⑧温哥华岛西海岸海洋生态系统研究,确定初级和次级生产力的生态生物物理因素,以及对鱼和鲸的影响;⑨实时观察北美西海岸海啸和其他巨浪,并模型化。
4.3 两种模式比较
首先,在经费的基本投入方面:单框架海底观测站的投资相对节省,因为单框架式海底观测站不需要对电力和通信设备单独大量投入。欧盟对GEOSTAR的开发仅投入了460万欧元[9]。加拿大近海的VENUS(versatile ecomonitoring network by undersea-Cable system)站点建设投入了1 030万加元,建立Neptune Canada一期光电缆网投入3900万加元,以后又增加节点,追加投入2000万加元。到目前为止Neptune Canada已经投入约1亿加元[10]。即单框架式作为一个小规模海底观测站,其基本经费投入是很低的。光电缆组网式可测范围越大,经费使用效率越高,但基本经费投入是相当可观的。
其次,在研究成果产出效率方面:在投入460万欧元后,GEOSTAR就可以展开有针对性的研究活动;Neptune Canada是在投入了1亿加元之后才可以展开各种研究活动。
再者,在发展方向方面:欧盟在GEOSTAR技术日趋成熟的基础上,对海底观测站的未来有远大的计划。欧盟已制订出欧洲多学科海底观测站计划EMSO(European Multidisciplinary Seafloor Observatory)和欧洲海洋观测网络计划ESONET(European Sea Observatory Network)[11],计划在大西洋与地中海精选12个点(北冰洋、挪威海、北欧海、派恩深海平原、亚速尔群岛、利古利亚海、大加那利岛、伊比利亚边缘、西部爱奥尼亚海、希腊弧、马尔马拉海以及黑海)设站建网,进行长期海底观测。加拿大对海底观测最舍得投入,Neptune Canada计划在胡安·德富卡板块有6个节点,但离岸最远、离海面最深的Endeavour Ridge和Middle Valley综合观察站点仍在等待进一步资金投入。美国最早的光电缆式海底观测站,是利用退役通信光缆建立的监测地震信息的夏威夷-2海底观测网,其后具有影响力的是1996年新铺光电缆建起的新泽西近海长期生态观测站LEO-15(long-term ecosystem observatory-15),海底站深度为15m[12]。而美国2008年提出的投资力度为3.3亿美元/6a的海洋观测计划OOI[13](Ocean Observatories Initiative),其海底观测站仅在胡安·德富卡板块部分,投入1 200万美元,2011年7月才开始铺设光电缆。OOI其他5个观察站均不再建立光电缆式观测站。而在近海光电缆观测站方面,美国于2003年在马萨诸塞近海又建立了近海观测站MVCO[14](Martha's Vineyard Coastal Observatory),海底站深度为12m。LEO-15和MVCO的海底站为与节点相连的观测子系统提供电源和数据通信。由此可见,美国对深海光电缆观测站的投入十分谨慎。
综上所述,从投资和科学研究效率的角度考虑,光电缆连接海底观测站不一定是深海观测的唯一最佳选择。因为单框架式海底观测站投资相对不多,就可在几千米水深工作一年以上,而且可回收并反复使用,从而获得相当大海域的阶段性观测资料;虽然其大多数通信是非实时的,但在大多数情况下可以满足科学研究的需求。深海光电缆式海底观测站的一次投入大,并且光电缆的使用寿命一般不超过30年,在金融危机的背景下,连美国都在观望,所以对光电缆组网的宽海域深海底观测站建设应采取谨慎的态度,而对沿海浅水域的海底观测站则仍然有较好的发展空间。
由于光电缆的实时通信能力和长时间的供电能力,为海洋学及海洋生物和地质过程的研究创造了条件,为地球科学、海洋学、生物学、生态动力学等学科的创新发展提供了基础,对推动地球和海洋科学的发展有重大意义。同时,实时观测特别有助于引发公众和学生的兴趣,在普及海洋知识方面会起到很好的教学效果。另外,这种海底观测站可以作为近(浅)海观测站的一部分,为其他观测设备提供能源和通信,对于完善近岸监测网络、服务海洋经济、普及海洋知识、提高对海洋的认识也是十分必要的。
[1]汪品先.从海底观察地球:地球系统的第三个观测平台[J].自然杂志,2007,29(3):125-130.
[2]词霸汉语频道.海底地震观测[EB/OL].(2009-03-16)[2011-12-12].http://hanyu.iciba.com/wiki/125919.shtml.
[3]阮爱国,李家彪,冯占英,等.海底地震仪及其国内外发展现状[J].东海海洋,2004,22(2):19-27.
[4]刘志飞,拓守廷.科学大洋钻探回顾与展望[J].自然杂志,2007,29(3):141-151.
[5]FAVALI P,BERANZOLI L.Seafloor observatory science:a review[J].Annals of Geophysics,2006,49(2/3):515-567.
[6]FAVALI P,BERANZOLI L.Geostar technology[J].ESO News Winter,2008-2009,2(3).
[7]Monterey Bay Aquarium Research Institute.A new way of doing oceanography[EB/OL].(2012-02-07)[2012-05-10].http://www.mbari.org/mars/.
[8]NEPTUNE Canada.Research projects[EB/OL].(2012-01-01)[2012-02-28].http://www.neptunecanada.com/research/research-projects/.
[9]European Commission.The star of the deep sea abyss[EB/OL].(2001-11-26)[2012-01-15]http://ec.europa.eu/research/news-centre/en/env/01-12-env03.html.
[10]CHRISTOPHER R.Barnes and,NEPTUNE Canada Team.Building the world’s first regional cabled ocean observatory(NEPTUNE):realities,challenges and opportunities[R].Vancouver,BC,Canada:MTS/IEEE Oceans,2007.
[11]EMSO.The european multidisciplinary seafloor observatory[EB/OL].(2012-01-01)[2012-02-28].http://www.emso-eu.org/management/.
[12]Coastal Ocean Observation Lab at Rutgers University.Coastal predictive skill experiments at LEO[EB/OL](2002-06-03)[2011-03-19].http://marine.rutgers.edu/mrs/LEO/LEO15.html.
[13]Consortium for Ocean Leadership.Ocean observatories initiative(OOI)[EB/OL].(2010-01-01)[2011-01-25]http://www.oceanleadership.org/programs-and-partnerships/ocean-observing/ooi/.
[14]Woods Hole Oceanographic Institution.Martha’s vineyard coastal observatory edgartown,massachusetts[EB/OL].(2008-01-01)[2011-01-09].http://www.whoi.edu/mvco/description/description2.
