无人机编队构成的分散最优控制方法研究
2012-11-03张立鹏魏瑞轩刘月郭立普
张立鹏, 魏瑞轩, 刘月, 郭立普
(1.空军工程大学 工程学院, 陕西 西安 710038;2.空军94170部队 计量站, 陕西 西安 710082)
无人机编队构成的分散最优控制方法研究
张立鹏1, 魏瑞轩1, 刘月2, 郭立普1
(1.空军工程大学 工程学院, 陕西 西安 710038;2.空军94170部队 计量站, 陕西 西安 710082)
针对无长机带领、具有固定无向通信拓扑的无人机编队构成控制问题,提出了一种基于“相邻”无人机状态反馈的分散最优控制方法。该方法采用Laplacian矩阵描述编队通信结构,以“相邻”无人机与编队构型间的相对状态误差构建分散最优控制模型,并通过求解具有LMI约束的线性目标最优化问题得到编队各无人机的分散最优控制律。该方法使得多无人机在分散协同的前提下,基于局部信息快速准确地形成预定编队构型,达到运动方向和速度的一致性。仿真实验验证了该方法的有效性。
无人机; 编队构成控制; 分散最优控制; 线性矩阵不等式
引言
编队构型形成控制是无人机编队协同控制面临的首要问题。其目的是使分散于多个不同空域的无人机迅速集结,形成稳定的预定队形,并保持各无人机运动速度和方向的一致性。无人机编队协同控制研究引起了国内外学者的广泛关注[1]。
在现有的研究中,Xiaohua Wang等[2]将编队构成控制问题分为两层,采用最优控制与模型预测控制相结合的方法形成预定编队构型;R L Raffard等[3]采用对偶分解方法求解编队构成控制的最优化模型,取得了较好的仿真效果;Sakai Yosuke等[4]研究了两架YF-22无人机的编队构成控制问题,并进行了真实飞行测试。以上算法在控制过程中跟随无人机仅与其领航长机进行通信,并与其保持相对构型,整个编队控制呈现串联结构。本文针对一类无长机带领、具有固定无向通信拓扑图的无人机编队构成问题展开了研究。在无人机编队构型描述的基础上,以各“相邻”无人机与预定构型间的相对误差建立分散最优控制模型,采用求解线性矩阵不等式的方法得到分散条件下的最优反馈控制输入。仿真结果表明,该方法能够快速准确地形成预定队形,并能够保持运动速度和方向的一致性。
1 无人机编队构成问题描述
1.1 无人机简化运动模型
针对多无人机在同一高度平面内的编队构型形成控制问题展开研究。给出简化无人机运动方程为[5]:

(1)
为将式(1)转化为线性模型,作如下变换:
(2)
定义状态变量z和输入量u分别为:
(3)
则式(1)可表示为以下伪线性形式:

(4)
其中:
1.2 无人机编队运动模型
(5)
式中,xi∈R4为无人机UAVi的状态量;ui∈R2为其输入向量。
令
X=[x1,x2,…,xn]Τ
U=[u1,u2,…,un]Τ
则无人机编队的整体运动模型可描述为:
(6)
其中:
An=In⊗A∈R4n×4n
Bn=In⊗B∈R4n×2n
结合式(3),进一步将无人机编队运动的状态量X分解为位置状态量Xp与速度状态量Xv,其关系如下:
Xp=In⊗[I20],X∈R2n
(7)
Xv=In⊗[0I2],X∈R2n
(8)
1.3 无人机编队构型描述
无人机编队构型可从通信拓扑结构和几何构型两方面描述。首先讨论无人机编队的固定、无向通信拓扑结构。图1为其通信拓扑结构示意图。

图1 无人机编队的通信拓扑结构示意图

编队的整体通信关系用邻接矩阵Ad=(gij)n×n表示,gij为:
(9)
在此基础上,令
D=diag(d1,…,di,…,dn)
其中:
(10)
由此导出与编队通信拓扑对应的Laplacian矩阵为:
L=D-Ad
(11)
L具备的特性可参见文献[6]。图1所示的编队通信拓扑对应的Laplacian矩阵为:
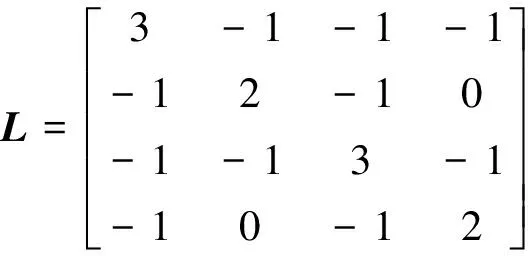
进而讨论编队几何构形。当无人机编队达到稳定时,各无人机相对位置固定,运动速度趋于一致,编队呈现稳定的几何构型。采用惯性坐标系下无人机位置和速度关系描述编队构型,首先给出编队几何构型稳定的定义。
定义1:给定编队构型向量为:

式中,hp∈R2n,为位置构型。
当存在位置向量q(t)∈R2,速度向量w(t)∈R2,使得当t→∞时有:

(12)

(13)
式中,1n为长度为n的全1列向量。
则称编队收敛到稳定的几何构形h。
式(12)表示若在时刻t编队各无人机的位置与预定构型hp(i)间的差向量均相同(均为q(t)),则该时刻的编队构型与预定构型一致。式(13)表示各无人机的速度一致。编队几何构型如图2所示。

图2 编队几何构型示意图
2 无人机编队构成的分散最优控制方法
在无人机编队建模和构型描述的基础上,给出分散条件下的编队构成最优控制方法。
首先定义无人机UAVi与UAVj间的相对状态为:
xij=xi-xj
(14)
为使得编队趋近于预定构型,相对状态xij应该趋近于对应编队构型向量hi与hj之差。定义误差向量为:
yij=xij-(hi-hj)
(15)
考虑无人机UAVi仅能获得其“相邻”无人机的状态信息,令yi表示UAVi与其“相邻”无人机的误差向量之和,则有:
(16)
对于编队中所有的无人机,其误差向量定义为:
y=[y1,…,yi,…,yn]Τ=Ln(X-h)
(17)
其中:
Ln=L⊗In
结合编队运动模型,给出编队构成的最优化性能指标为:
(18)
式中,Qn∈R4n×4n,Rn∈R4n×4n均为对称正定矩阵。
令
可将式(18)化简为:
(19)
因为编队构型向量h为预先给定的常数向量,则式(19)可视为无限时间定常跟踪系统。为求解该系统,首先必须对其求解条件进行讨论。为此,给出如下定理:
定理1:当存在相互连通的无人机编队通信拓扑时,式(19)存在可行解,即无人机编队能够收敛到预定构型。
文献[7]给出了求解无限时间定常跟踪系统的近似最优控制输入,可表示为:
U=-(Rn)-1BnΤ(PX-g)
(20)
式中,对称正定矩阵P满足下列Riccati方程:
(21)
g为伴随向量,可通过求解下式获得:
(22)
上述求解方法没有将编队通信关系考虑在内,最优控制输入的计算依赖于整个编队的全状态反馈,因此不能保证控制的分散性。为对上述方法进行改进,定义:
P=L⊗pij(i,j=1,2,…,n)
(23)
式中,pij∈R4×4为待定参数,当不存在无人机UAVi与UAVj的通信连接,即L(i,j)=0时,有:
L(i,j)pijXj=0
(24)
根据式(20)可知,在上述条件下无人机UAVi控制量的计算不依赖于无人机UAVj的状态,由此可保证反馈控制输入的分散性。为求解P中所有需待定的参数,将式(21)的求解转化为带线性矩阵不等式(LMI)约束的最优化问题[8]:
(25)


(26)
3 仿真实验
考虑4架无人机所构成的边长为200 m的菱形编队(见图1),选取一组初始状态(见表1)进行编队构成仿真。
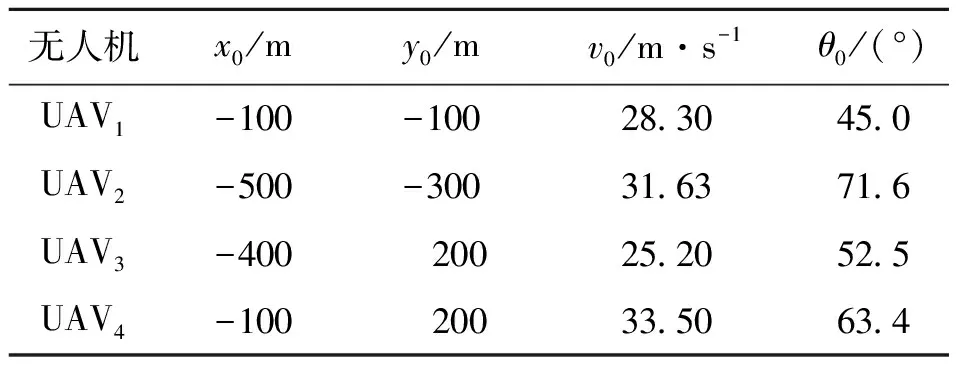
表1 无人机编队构成仿真的初始参数
选取加权矩阵Qn=500I16,Ri=100I16,通过求解,得到如图3所示的编队形成航迹。从图中可以看出,各无人机快速准确地形成了预定构型。

图3 编队构成航迹
图4为编队构成过程中无人机UAV1与其它各无人机的相对位置误差(Δl)曲线,图5为各无人机的速度变化曲线。

图4 UAV1与编队中其它无人机间的距离误差

图5 无人机的速度变化曲线
从图中可知,采用文中的算法实现了运动速度和方向的一致性要求。为进一步验证算法的有效性,以坐标原点为中心,在半径为1 000 m的圆形空域内随机生成4架无人机的初始位置、初始速度和偏航角,进行4组仿真,实验结果如图6所示。
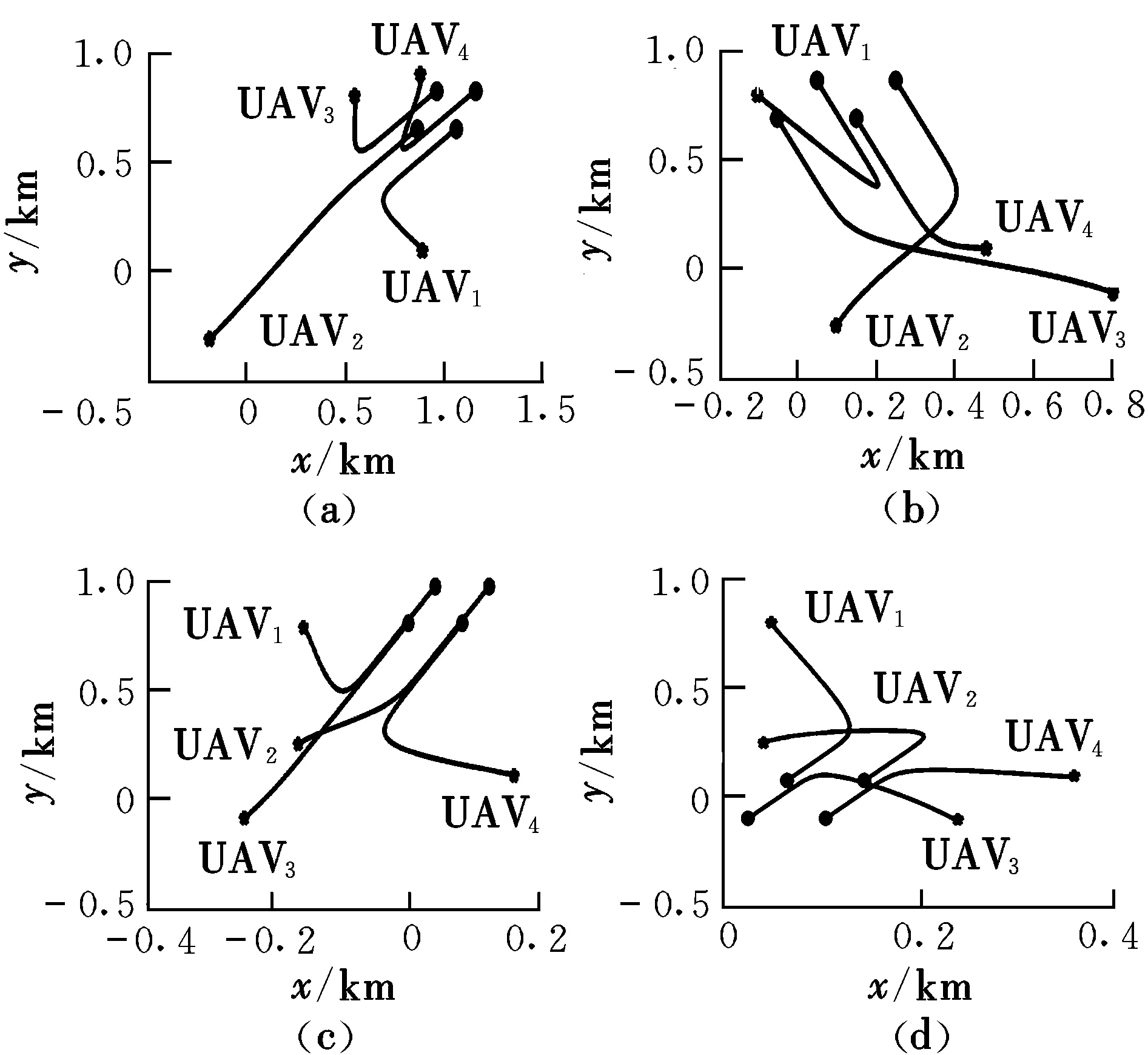
图6 4组不同初始状态下的编队构成航迹
根据多组仿真结果,通过进一步分析编队无人机初始速度与最终编队收敛速度间的关系,可以发现存在如下关系:
(27)

4 结束语
针对一类无长机带领且具有无向通信拓扑结构的无人机编队构型形成的控制问题,提出了基于“邻近”无人机状态反馈的分散最优控制方法。从仿真结果可以看出,本文提出的方法能够较好地实现任意初始状态下的编队构型形成控制,并具有形成速度快、编队构型准确的特点。在编队构型形成的基础上实现无人机编队对任意航迹的跟踪,以及考虑无人机性能约束条件下编队的保持与跟踪将是下一步研究的重点。
[1] 樊琼剑,杨忠,方挺,等.多无人机协同编队飞行控制的研究现状[J].航空学报,2009,30(4):683-691.
[2] Wang Xiaohua,Vivek Yadav,Balakrishnan S N.Cooperative UAV formation flying with obstacle/collision avoidance[J].IEEE Transactions on Control Systems Technology,2007,15(4):672-679.
[3] Raffard R L,Tomlin C J,Boyd S P.Districbuted optimization for cooperative agents:applocation to formation flight[C]//43rd IEEE Conference on Decision and Control. Bahamas Atlantis,2004:2453-2458.
[4] Yosuke Sakai,Shinji Suzuki,Masahiro Miwa,et al.Flight test evaluation of nonlinear dynamic inversion controller[C]//46th AIAA Aerospace Sciences Meeting and Exhibit.Reno Nevada,2008:209-223.
[5] Stipanovic D M,Inalhan G,Teo R,et al.Decentralized overlapping control of a formation of unmanned aerial vehicles[J].Automatica,2004,40(2):1285-1296.
[6] Lafferriere G,Williams A,Caughman J,et al.Decentralized control of vehicle formation[J].Systems & Control Letters,2005,54(3):899-910.
[7] 胡寿松,王执铨,胡维礼.最优控制理论与系统[M].北京:科学出版社,2005.
[8] Rami M Ait,Zhou X Y.Linear matrix inequalities,riccati equations,and indefinite stochastic linear quadratic controls[J].IEEE Transaction on Automatic Control,2000,45(6):1131-1142.
[9] Kazerooni S,Khorasani K.Optimal consensus algorithms for cooperative team of agents subject to partial information[J].Automatica,2008,44(4):2766-2777.
DecentralizedoptimalcontrolforUAVformationforming
ZHANG Li-peng1, WEI Rui-xuan1, LIU-Yue2, Guo Li-pu1
(1.Engineering Institute, Air Force Engineering University, Xi’an 710038, China;2.Computation Department, 94170 Unit of Air Force, Xi’an 710082, China)
In order to form a special formation when the leaderless UAVs maneuver with the undirected communication topology, a decentralized optimal control method based on the neighbors’ state feedback is proposed. The Laplacian Matrix is intorduced to discribe the communication topology, and a decentralized optimal control model based on the error between the neighbors’ state and the target formation is built. And the decentralized optimal control law is obtained by solving the minimum problem with the linear matrix inequalities(LMI) constrains. This method can guarantee the UAVs form the formation rapidly and precisely, and reach speed and direction consensus with the local information. Simulation results demonstrate the effectiveness of the proposed method.
UAV; formation forming control; decentralized optimal control; LMI
2011-03-10;
2011-08-28
张立鹏(1986-),男,陕西礼泉人,硕士研究生,从事多无人机协同控制研究。
V279; TP273
A
1002-0853(2012)01-0025-04
(编辑:姚妙慧)
