基于人工神经网络的驾驶员操纵行为模型
2012-11-03颜世伟高正红
颜世伟, 高正红
(西北工业大学 航空学院 , 陕西 西安 710072)
基于人工神经网络的驾驶员操纵行为模型
颜世伟, 高正红
(西北工业大学 航空学院 , 陕西 西安 710072)
驾驶员操纵行为受到自身、外界环境和被控对象等多方面的影响,因此驾驶员模型具有非线性的特征。神经网络模型克服了拟线性模型不能反映驾驶员非线性操纵的问题。为了获得建立模型的数据,利用地面模拟器使飞行员对一系列指令进行精确跟踪。获得的指令、飞机状态和驾驶员输入信息等参数即可作为神经网络模型的训练样本。神经网络驾驶员模型的训练和测试结果表明,该建模方法是合理、准确的,可以应用于人机闭环系统中驾驶员操纵的研究。
人机系统; 驾驶员模型; 人工神经网络; 地面模拟器
引言
驾驶员模型研究在人机系统飞行品质和驾驶员诱发振荡(Pilot Induced Oscillation, PIO)等方面都有广泛的应用。在由驾驶员、飞机组成的人机系统中,“飞机”还包括飞机运行中的各类显示装置和操纵装置。驾驶员通过本身的感受和显示装置的指示了解飞机的运行情况,并根据任务的需要,通过操纵系统对飞机运行进行控制。尽管人的各种特质,如情绪、想象力等影响操纵行为的特征无法用数学模型来加以描述,但在某些具体的飞行任务中驾驶员的操纵行为是可以模型化的。因为在这些任务中驾驶员的操纵行为受到飞机和任务等条件的限制,操纵行为会体现出某种规律性,而这种规律性就为驾驶员控制的数学模型化提供了基础[1]。
在拟线性驾驶员模型研究中,McRuer等人在对大量单自由度补偿任务研究的基础上建立了McRuer驾驶员控制模型。Baron,Kleinmen等人利用现代控制理论建立了最优控制模型。为了能建立更准确的反应驾驶员的控制特性和方便在飞行品质评估中使用的驾驶员模型,以及随着神经网络理论的发展,人们提出了神经网络驾驶员模型。下面将对神经网络驾驶员模型进行探讨,并进一步发展和验证这种模型。
1 驾驶员操纵行为模式与驾驶员模型
1.1 驾驶员操纵行为模式
大量的实践表明,驾驶员通常采用两种方式操纵飞机,这两种方式模型化后可表示为:开环操纵和闭环操纵。对于不需要精确控制飞机飞行速度、姿态和航迹的飞行状态,例如爬升、下降、巡航等,驾驶员一般通过操纵飞机的油门杆和驾驶杆来改变飞机的运动,而运动参数的变化并不能及时地影响驾驶员的操纵。在这种情况下,由驾驶员、操纵系统和飞机这几个环节组成的这一串联系统,不形成封闭回路,称为开环系统。
与之对应的,对于需要精确控制飞机飞行速度、姿态和航迹的飞行状态,例如编队、空战等,驾驶员要随时注意飞机运动参数的变化,反复地调整油门位置和驾驶杆,以及时修正飞机的姿态,达到精确操纵的目的。在这种操纵方式中,通过飞机运动参数的反馈使驾驶员、操纵(控制)系统和飞机这三个环节形成了闭环回路,称为闭环系统。这时,驾驶员所施加的操纵是按照飞机运动参数的变化而及时调整的,从而能达到更为精确地控制飞机的目的。
驾驶员控制飞机的行为只是人控制机器行为的一个特例。所以,可以从大量的人机系统动力学研究中得到一些启示。根据人机系统研究的结果,闭环的人机控制可按照输入给操作人员信息的性质来进行分类,通常可以分为四类:补偿系统、追踪系统、预先显示系统、预先认知系统[2]。
1.2 传统的驾驶员模型
McRuer模型是20世纪60年代中期由McRuer,Graham等人在大量简单跟踪任务试验结果的基础上提出的一种拟线性驾驶员控制模型。McRuer模型为:

式中,Kp为增益;s为拉普拉斯算子;τ为驾驶员反应的时间延迟;TN为神经肌肉系统固有的一阶延迟;TL,TI分别为超前和滞后时间常数。McRuer驾驶员模型中的各个系数的大小反映了驾驶员操纵行为的具体特征。例如当驾驶的滞后补偿TI增大后,人机系统闭环短周期阻尼比有所增加,但随着增益的加大,会导致人机闭环系统失稳。这也是驾驶员一般不愿意在飞行中采用滞后补偿操纵方式的原因。
虽然在完成特定任务时,驾驶员的操纵都遵循一定的规律,但是由于人的生理条件和外部环境的限制和影响使得驾驶员完成任务的操纵指令都不完全相同。例如每次任务中辨识出的McRuer驾驶员模型都是不相同的,或者同一个驾驶员模型无法适应于不同的任务。这就为具体选择和使用McRuer模型造成了一定的困难。
神经网络建模方法可以对非线性动态系统进行有效的建模并揭示数据间的相互关系,这种建模方法克服了McRuer模型参数与实际任务关联紧密的不足。对于驾驶员模型来说,以往利用传递函数形式的驾驶员模型往往难以实现对驾驶员行为的较精确地逼近,原因是驾驶员本身操纵行为的非线性。而神经网络却能够模拟具有较高非线性的连续动力学系统,而且在函数逼近方面具有很强的非线性逼近能力,且神经网络方法在建模的诸多领域得到广泛的应用。许多实际应用的研究表明,神经网络方法适合非线性系统的模型识别。
2 试验环境与设计
2.1 地面模拟装置
为了获得驾驶员操纵行为建模的试验数据,采用了地面模拟飞行任务的方式采集所需的数据。地面模拟试验采用了自主研发的地面模拟器,模拟器配置如图1所示。指令信号显示在平显(HUD)上,其中纵向指令信号为一个醒目的红色虚线,例如显示在图2中-20°的位置,它为驾驶员提供纵向的指令信息,平显上W形的符号指示了飞机的实际俯仰角。驾驶员通过操纵飞机,使平显上的俯仰角信号与指令信号的标示重合即可完成对指令的跟踪。指令的设计可以通过配置模拟器中相应的文件来实现,指令的大小与变化将根据具体的试验来制定。指令信号可以由阶跃指令、脉冲指令、随机指令等信号组成。

图1 模拟器配置

图2 平显中纵向指令的显示
模拟器中使用的飞机模型的纵向传递函数可以近似表示为:

2.2 人机闭环试验设计
为了获得辨识和验证驾驶员模型的数据,在模拟器上进行的是单自由度补偿任务。试验借鉴了评估飞行品质的阶跃指令动作,采用了纵向的连续阶跃指令。使用阶跃指令可以用来检验飞机初始状态时的响应、阻尼比和频率,时域响应的结果也可以用于人机系统的辨识。当试验开始时,每个俯仰角指令由0°开始,然后依次出现正负变化的阶跃俯仰角指令。飞行员通过平显观察飞机实际的俯仰角和指令信号的位置来操纵飞机,尽量使俯仰角与指令相同,并保持稳定的状态。指令信号θcmd由零和正负阶跃指令组成(见图3),其中实线为指令,虚线为飞机的俯仰角。图4中实线为指令信号与飞机的实际俯仰角之间的差值e,虚线为驾驶员的输出量产生的纵向杆位移x。
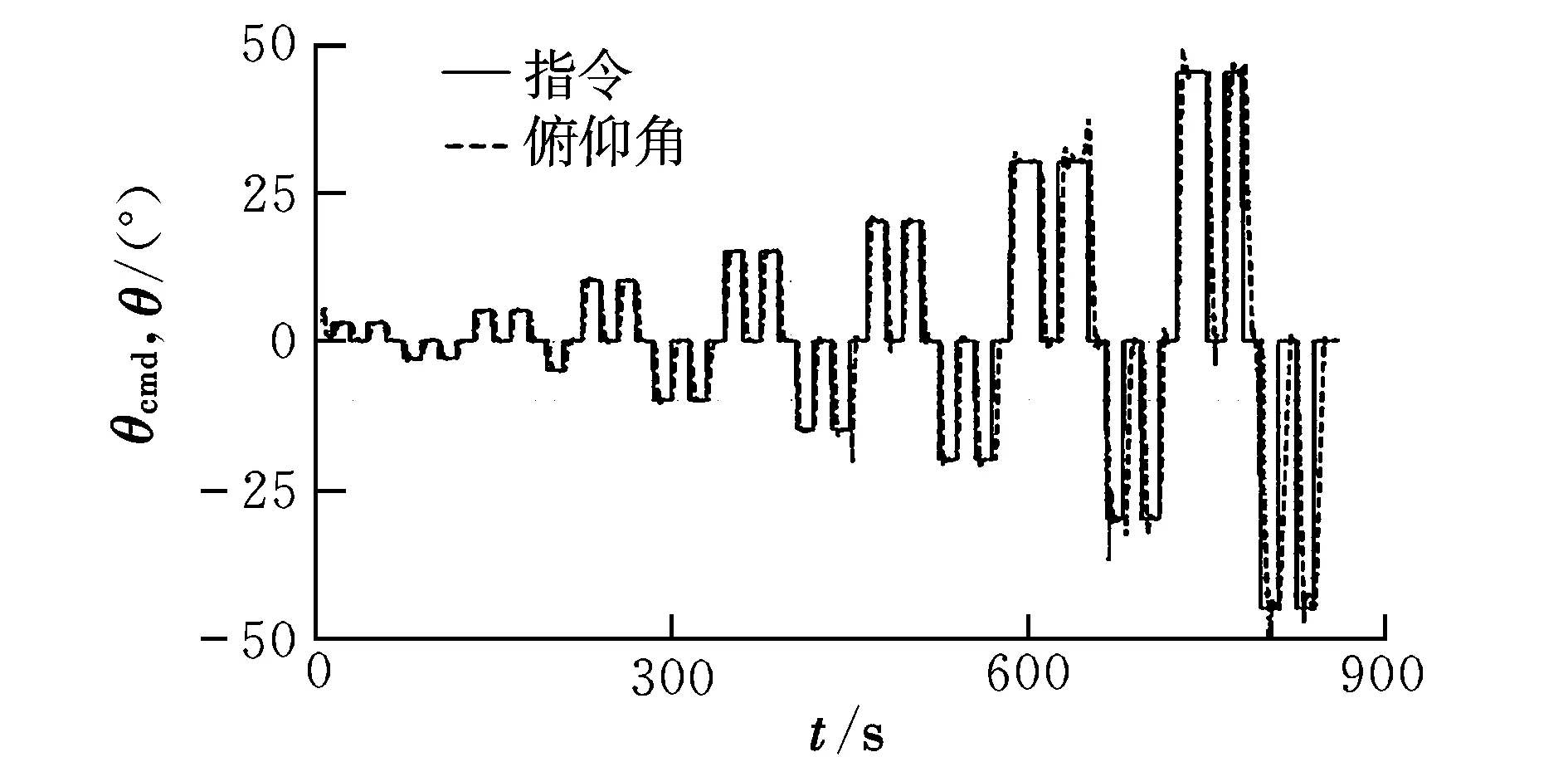
图3 纵向指令信号与俯仰角

图4 杆位移与误差信号
3 驾驶员模型的建立
3.1 人工神经网络模型
神经网络是由神经元按照一定的方式连接起来的,能够模拟人脑神经系统的运行机制,使神经网络具有自主学习的能力。其中神经元为神经网络的基本处理单元。通过对神经网络的在线或离线训练,可使预先建立起来的神经网络对收集的信息进行学习,使神经网络揭示出数据中包含的规律并可以根据输入的信息进行相应的控制[3-4]。
神经网络驾驶员模型正是利用了神经网络的这些特点来对驾驶员的操纵行为进行建模。虽然驾驶员在完成特定的单轴控制任务时可以简化成单通道的控制模型,但是这种单通道模型无法体现驾驶员的操纵特点,对单通道补偿跟踪任务的数据进行驾驶员模型辨识的结果可以看出,相同任务和相同驾驶员的操纵都是不相同的。在实际情况下,驾驶员不仅参照平显上的误差提示信息来操纵飞机,飞行仪表、平显上的其他参数对驾驶员的操纵都会造成影响。
3.2 BP神经网络驾驶员模型
驾驶员控制模型采用三层BP神经网络结构,BP神经网络具有对非线性模式进行识别的能力,它的这个特点符合驾驶员操纵行为的非线性特征。文献[5]中对神经网络模型与拟线性模型各自的优势进行了比较,并验证了神经网络在拟合驾驶员对随机信号跟踪时的操纵行为模型的有效性,这种单输入单输出的模型能够很好地跟踪操纵的变化趋势。
对于BP神经网络模型来说既可以采用单输入单输出的形式,也可以使用多输入多输出的形式[6]。为了使建立的模型能够更准确地体现出驾驶员操纵的非线性和多路信号对操纵的影响,多输入单输出的神经网络模型使用了4个参数作为模型的输入。这4个输入分别是:俯仰角指令、飞机的实际俯仰角、前面这两个量的差值(误差)和杆位移。神经网络模型的输出为驾驶员的操纵量(纵向杆位移)。根据上述简化,驾驶员纵向操纵模型的输入输出形式如图5所示。模型的输入量驾驶员杆位移与模型输出的杆位移是不相同的。为了能在输入量中体现出信号的变化情况,输入信号为当前时刻之前产生的值。以采样率为0.1 s为例,模型输出为0时刻的值,输入量即为-0.5~-0.1 s的值。这4个模型输入既包括了驾驶员接收到的指令,也包括飞机的响应与响应变化快慢的信息。

图5 神经网络驾驶员模型
4 仿真试验与建模结果分析
仿真试验采用的指令为图4中实线。为了尽可能多地采集驾驶员的信息和减少驾驶员操纵失误对试验数据的影响,最后选取误差比较小和操纵比较精确的试验数据作为进行建模和验证模型的数据。训练神经网络的数据为±20°指令之外的试验数据,以这些指令时的数据作为神经网络的训练样本。网络的学习方法有很多种,经过验算通过不同学习方法得到的网络性能基本一致。

图6 神经网络学习过程
神经网络的学习过程如图6所示。神经网络模型为三层结构:一个输入层、一个隐层和一个输出层。隐层神经元的个数一般根据经验公式选择。如果选择的神经元个数太少,将无法实现对数据规律的学习;神经元越多,网络对数据逼近的能力越强,但过多的隐层神经元会使网络逼近的是信号中的扰动,而不是驾驶员的真实操纵。文中模型的隐层神经元个数是通过尝试经验公式范围网络误差输出最小来确定的。这里网络输入层的个数为20,隐层神经元个数为30。隐层神经元选择了双曲正切传递函数,输出层选择线性传递函数。
图7和图8为训练与仿真结果。图7中的曲线为训练数据的部分结果,实线为驾驶员控制的实际杆位移,虚线为模型输出。图8为驾驶员实际输出和模型对测试数据的输出,实线为驾驶员的输出,虚线为模型的输出。测试神经网络模型的数据选择了俯仰指令为±20°时飞机和驾驶员的响应。这组数据未包含在神经网络训练数据中,所以对于神经网络模型来说这组数据是一组全新的数据。从图8中网络的输出可以看到,模型根据输入量基本可以拟合出驾驶员的输出信号。
图9为仿真结果与实际值的误差,可以看出在俯仰角保持阶段,模型的误差很低,在指令开始变化后模型的误差才会增大,但误差量也比较小。

图7 神经网络训练结果

图8 神经网络仿真结果
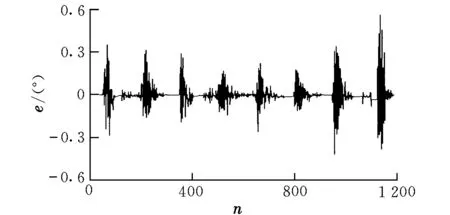
图9 仿真误差
5 结束语
对针驾驶员操纵的多通道、非线性的特点,利用BP神经网络对驾驶员的操纵行为进行了建模。通过对神经网络模型的训练以及测试结果与驾驶员实际操纵量的对比可以看出,神经网络驾驶员模型可以较好地跟踪指令的变化,再现驾驶员的操纵行为,同时对未知指令也有一定的预测和跟踪能力。
[1] 胡兆丰.人机系统和飞行品质[M].北京:北京航空航天大学出版社,1994.
[2] 高浩,朱培申,高正红.高等飞行动力学[M].北京:国防工业出版社,2004.
[3] 杨淑莹.模式识别与智能计算:Matlab技术实现[M].北京:电子工业出版社,2008.
[4] 飞思科技产品研发中心.神经网络理论与MATLAB7实现[M].北京:电子工业出版社,2005.
[5] 谭文倩,屈香菊,王维军.驾驶员神经网络模型与频域拟线性模型的比较研究[J].航空学报,2003,24(6):481-485.
[6] 徐瑾,赵又群,阮米庆,基于汽车操纵动力学的神经网络驾驶员模型[J].动力学与控制学报,2008,6(4):381-384.
Researchonpilotbehaviormodelbasedonartificialneuralnetwork
YAN Shi-wei, GAO Zheng-hong
(College of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China)
Pilot control behavior will be affected by the motion of object, pilot-himself and environments, all these disturbances make the control behavior present non-linear characteristics. Therefore the pilot model should have these features which the quasi-linear model could not represent, but the artificial neural network (ANN) pilot model has this pilot control behavior features. The test on ground-based simulator made the flight and pilot’s data to use for making the ANN pilot model. Compared with McRuer pilot model, the precision and applicability of neural network pilot model could be better.
aircraft-pilot system; pilot behavior model; artificial neural network; ground-based flight simulator
2011-06-13;
2011-10-31
颜世伟(1982-),男,黑龙江哈尔滨人,博士研究生,研究方向为飞行力学。
V212.1
A
1002-0853(2012)02-0105-05
(编辑:王育林)
