超声波电动机驱动控制综述
2012-10-31罗辞勇肖发福
罗辞勇,张 帆,卢 斌,肖发福
(重庆大学,重庆 400044)
0 引 言
超声波电动机是近些年来发展起来的一种新型电机,它不同于传统的电磁式电机。超声波电动机的工作原理是利用压电材料的逆压电效应,对定子上的压电陶瓷元件施加一定功率超声频段的交流信号激发其微幅振动,再通过定子和转子之间的摩擦作用最后将电能转化为机械能。由于驱动超声波电动机的信号必须是具有一定功率的高频高压信号,所以超声波电动机功率驱动电路的功能是将驱动器的控制信号转换为可驱动电机正常运行的功率信号。驱动器(有时也称之为驱动电源)性能的优劣,不仅关系到超声波电动机的输出性能,也会影响其实际应用[1-2]。
根据超声波电动机自身的特点,超声波电动机在运行的过程中应该重点考虑驱动器输出的电压幅值、频率和相位差,加上传统电机驱动器的设计要求,因此超声波电动机驱动器应具备以下功能:
(1)驱动电压可调,驱动电压过高会使压电陶瓷片破裂,过低则电机不能正常工作。
(2)驱动器的频率应该根据超声波电动机的驱动频率可调(一般20~100 kHz)。
(3)驱动器需提供两路或四路具有一定相位差并且在0~180℃范围连续可调的驱动信号。
(4)可实现正反转。
(5)由于超声波电动机为容性负载,驱动器需要进行阻抗匹配。
(6)由于超声波电动机存在的非线性,在超声波电动机实际运行中,需要通过控制回路来进行调速。
超声波电动机对于驱动电路而言是一个容性负载,其等效电路如图1所示。在一般情况下都认为Cd为静态电容,但是当压电陶瓷在强电场的作用下,电容不是静态电容且电容值不稳定,此时电源驱动器驱动电机,会引起作用在电机两端电压不稳定,且其幅值也会时大时小[3]。

图1 超声波电动机等效电路图
超声波电机驱动电路包括可调频率发生器、分频分相器、功放电路和匹配电路[1]。图2为驱动器的基本结构框图,其中最后驱动超声波电动机的驱动信号是两相相位相差90°的高频交流信号,此高频交流信号可以是正弦交流信号也可以是方波交流信号[4]。本文在超声波电动机驱动原理的基础之上,比较全面地阐述了驱动控制电路各个部分的组成、目前的主要技术和发展方向。
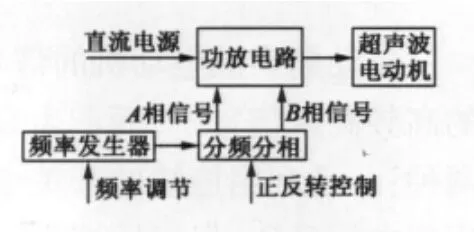
图2 驱动器的基本结构框图
1 驱动信号的产生
根据超声波电机的特性,超声波电机对于驱动信号有特定的要求,传统的驱动信号产生电路包括了可调频率发生器、分频分相器。可调频率发生器的选择有很多种,如RC多谐振荡器、555多谐振荡器、压控振荡器等。分频分相器的功能是将频率发生器产生的单相信号转换成两相信号,文献[1]介绍了移位寄存器构成的分相器CD10194和复杂可编程逻辑器件构成的分相器。文献[5]提供了多种基于单片机提取输出波形的方法,并且随着单片机和DSP性价比的提高,使用MCU作为频率发生器会逐渐成为主流。
传统的超声波电动机驱动存在着体积大、性能单一、难实现频率连续可调等问题,而近年来发展起来的数字直接合成技术(DDS)[1-2]可以较好地解决上述问题。DDS以模拟放大电路为基础,先由DDS信号发生单元产生两路独立的正弦信号,然后这两路信号分别经低通滤波和三极管射极跟随送至高速光隔[6],最后高压运算放大器放大驱动超声波电动机,其峰峰值可以达到250~300 V[5],但此方法使得驱动电源结构复杂、电源效率低且成本较高。DDS是信号发生单元,其芯片输出的是数字化的正弦波,因此,还需经过高速D/A转换器和低通滤波器才能得到一个可用的模拟频率信号。图3为DDS的原理框图[7]。

图3 DDS原理框图
文献[8]驱动电路中介绍了一种AD9850DDS芯片,该DDS芯片具有较高的性价比,可产生最高62.5 MHz的信号,直接控制精度11.25度,在实际应用中达到了控制要求,采用8位并行或者串行方式传输总长40 bit的控制字。
2 驱动功率放大电路
驱动超声波电动机的信号必须是具有一定功率的高频高压信号[1],而产生高频高压的方式主要有两种:一是利用传统的开关电源技术结合变压器来实现电压升压,但变压器必须与不同型号的超声波电动机匹配,不利于小型化和通用化。二是利用超声波电动机的特性,如等效电路参数,采用谐振电路实现超声波电动机的无变压器驱动[2],此驱动电路可以有效地减小体积、降低成本,且便于集成化生产,适用于超声波电动机功率不是很大的小型便携式设备及对体积、重量有严格要求的产品,如照相机的调焦、航空、航天等领域[9]。
开关逆变型驱动电路是基于逆压电原理的超声波电动机驱动电路,根据其结构的不同和应用要求的不同,有不同的电路拓扑结构。利用MOSFET构成的开关逆变驱动电路主要可以分为三种:推挽变换电路、全桥变换电路和半桥变换电路[1-2]。推挽式开关电路是开关逆变电路的典型,所以本文只介绍了推挽式开关电路。图4为推挽电路的原理图,其中Q1、Q2交替导通,在变压器T原边的两个绕组分别形成相位相反的交流电压,其突出的优点是电路对称,两个开关元件的驱动电路具有公共地,不需要隔离驱动,可以简化电路设计[5]。推挽式变换器具有最简单的电路结构,并且变压器利用率高,特别适合低电压供电的超声波电动机驱动,但考虑到安全问题,每个开关管的额定电压应该为输入电压的3.3倍[1,5]。这种电路结构在日本新生公司的超声波电动机驱动器、东南大学、南京航空航天大学所做的超声波电动机中得到了广泛的使用[5]。
以推挽电路为典型的开关逆变型驱动电路不允许两个串联的开关管同时导通,否则会损坏开关管,不能使用50%占空比的方波信号进行驱动,且必须为两路驱动信号设置死区[1]。
谐振升压式驱动电路是根据超声波电动机的容性负载特性,将超声波电动机本身作为电路的组成部分,匹配其他元件构成自激振荡电路,参与驱动信号的产生[10]。充分利用谐振升压的无变压器式驱动电路不仅减少了驱动器的体积,还为驱动器的通用性和微型化创造了条件。根据谐振电路的原理和拓扑结构,下面介绍LC和LLCC谐振升压电路。
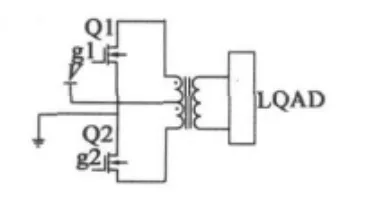
图4 推挽变换电路
LC谐振电路如图5所示。超声波电动机本身相对于驱动电路是一个容性负载,因此只需要串联一个电感就能组成LC谐振电路,其基本原理为BOOST升压电路[10]。在图5中,当开关SW1闭合时,电源向电感L储能;当开关断开时,电感中的储能向电容C释放能量并与其谐振。

图5 LC谐振电路的原理图
LLCC 变换电路[4,6]:在绝大多数传统驱动方式中,两相电路的品质因数不同且随时间变化。当串联谐振逆变器的开关频率和谐振频率趋于一直时,品质因数的变化将引起电压增益的严重畸变,并导致两相输出电压在同样的开关频率下出现不稳定。为了解决这个问题,最新的提法是利用高阶逆变器即LLCC变换电路对传统的谐振电路进行拓扑[6]。LLCC谐振升压电路包含了三阶LCC型和LLC型逆变器的优点,其原理图如图6所示,该谐振电路利用了超声波电动机本身容性负载的特性,LS、CS构成串联谐振电路,同时 LP、CP构成并联谐振电路。
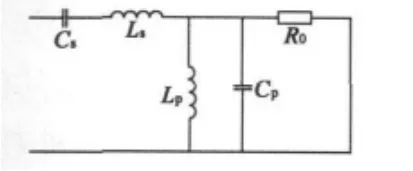
图6 LLCC谐振升压电路
文献[11]提出了一种基于RCD箝位单端反激型DC-DC变换电路,的超声波电动机升压电路:该电路的原理图如图7所示。以开关电源控制芯片UC3842为核心,采用双副边绕组变压器结合整流电路输出正负对称直流电压[11]。此电路由 R1、C1、D1 组成的RCD吸收电路很好地解决了在功率管Q1关断时漏感所引起的电压尖峰,当开关管关断时,变压器漏感能量转移到电容C上,使电压始终稳定在设定值附近[11]。

图7 单端反激型DC-DC变换电路
3 匹配电路
阻抗匹配在驱动电路设计中有着重要的作用,一方面可以改善驱动电路与超声波电动机之间的耦合度,另一方面可以改善输出的电压波形即滤波和改变功率因数角,达到改善输出功率的目地[2]。合理的阻抗匹配可以在超声波电动机系统中起到调谐、变阻、滤波的作用[12]。阻抗匹配一般有并联电感、串联电感、电感-电容匹配和T型网络匹配等方法。
并联电感匹配就是在超声波电动机的输入端口并联一定值的电感,如图8所示。当匹配电感与超声波电动机并联时,超声波电动机的串联共振频率不变,但并联共振频率会升高[2]。超声波电动机系统的有功电阻在采用并联电感匹配这种方式后并没有什么变化,同时这种方式缺乏滤波作用[12]。
串联电感相对于并联电感不仅有滤波上的优点,还能兼顾调谐作用[12],所以较之于串联电感匹配,并联电感匹配并不常用。
串联电感匹配就是在超声波电动机的输入端串接上匹配电感,如图9所示。串联电感的加入使超声波电动机的串联共振频率降低,但并不影响并联共振频率即超声波电动机本身的共振频率,同时会在高于并联共振频率下出现另一串联共振频率[2]。串联电感匹配相对于其它匹配兼顾了滤波和机电耦合系数,因此在匹配电路中得到了较广泛的应用。

图8 并联电感匹配等效电路图

图9 串联电感匹配等效电路图
电感 -电容匹配[13]等效电路如图10所示,相当于串联电感匹配并联了一个电容。

图10 电感-电容匹配等效电路
当L1、C1满足以下值时:

系统阻抗Z呈现为纯电阻。
T型网络匹配[12]如图11所示。T型网络匹配相当于在串联电感匹配的电路基础之上再并联了一个电容和串联了一个电感,对解决调阻不明显问题很有效。

图11 T型网络匹配等效电路
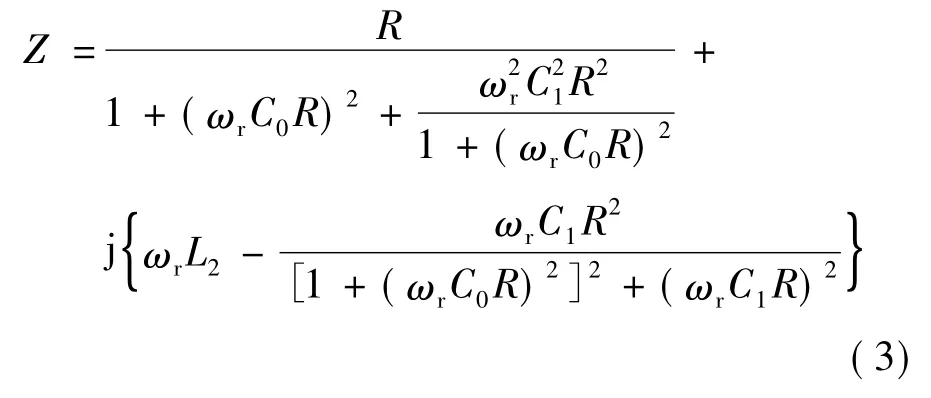
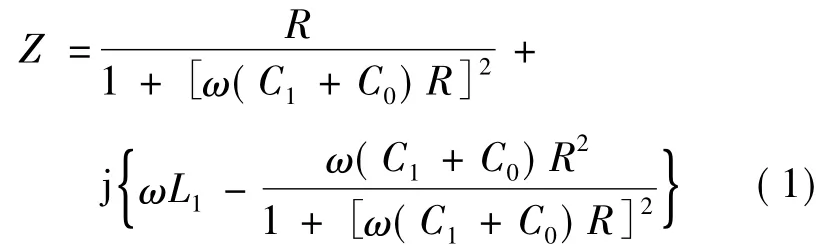
当匹配值满足式(4)时,等效阻抗为纯阻抗:

超声波电动机正常工作时,通常认为电机工作在谐振和反谐振点之间[1,14],也就近似认为正常工作时的等效电路为超声波电动机的电阻和电容的并联,但是由于负载的变化一方面会造成电阻值R的变化,此时如果正弦波不纯且电压波动大就会造成超声波电动机的输入电压波动很大;另一方面由于超声波电动机原理和其结构上的特点,在负载变化或者外界强电场环境时整个等效电路的电容值C∑是不断变化的,根据谐振的理论电容值的变化就将导致固有频率的漂移,对驱动的影响是很大的。所以在进行匹配电路设计时还应该考虑到负载的影响。
以上匹配电路在一定程度上改善了驱动电路与超声波电动机的耦合度和功率因数等问题,但如果想要在电机稳定运行的基础之上实现一定精度的定位或速度控制[15],进行伺服控制研究,就需要采用闭环控制。
4 驱动技术的发展方向
随着超声波电动机应用的日益广泛,对超声波电动机驱动器也提出了很多新的要求。
(1)从现有的超声波电动机的驱动技术来讲,一般旋转型行波超声波电动机的效率在30%左右,且输出不超过50 W,因此希望从驱动器在这一方面提高超声波电动机的效率,增大特定场所超声波电动机的输出功率,提高电机运行时的稳定并向模块化和智能化的方向发展。
(2)根据很多微型领域对超声波电动机的需要,就对驱动电路的微型化提出了要求,实现控制系统和驱动电路的微型化,比如美国的纳米卫星。
(3)从超声波电动机及超声波电动机驱动器的非线性来讲,超声波电动机在运行的过程中的非线性现象主要表现在压电材料非线性引起的定子振动的非线性、驱动电路的非线性、定转子之间接触引起的非线性等[3]。其中首先要特别注意压电陶瓷非线性作用引起被激励体出现的非线性系统强迫振动的跳跃现象[3]。在利用频率调节超声波电动机运行速度时,当驱动频率从大向小调节时,电机的速度会增加,但是到了某一频率时电机的速度会突然减小,甚至为零,若此时再增大频率,电机的运行速度也不会增加很快[3]。所以在超声波电动机驱动器的设计中,要有针对性的使驱动频率大于跳跃频率,以免运行时出现速度跳跃。其次是要注意驱动电路本身的非线性特征。
(4)以压电变压器代替传统的电磁式变压器。传统的电磁式电机往往有效率低、有电磁噪声、体积大和重量大等缺点,不利于驱动器的集成化和微型化,并且电磁式变压器也让超声波电动机不受电磁干扰的优点打折扣,所以压电变压器就成了一种新的选择,其高输出电压、无磁场干扰和结构紧凑的优点相对于传统的电磁式变压器有很大的优势。
(5)从驱动器的通用性来讲,对于不同的超声波电动机,有不同的匹配电路参数,并且正因为这种匹配使得输出信号的频率、电压、相位相互耦,合伴随着电机参数的变化而变化,制约了通用性的发展。所以,对于通用性的要求应该配置匹配参数可调。文献[16]设计了一种基于PSoC的新型驱动器,实现了控制量的解耦,其电压幅值、频率可独立调节。
(6)实现超声波电动机的精确控制就会涉及到闭环回路,而通常的做法是采用频率跟踪控制。在文献[1]的研究中,加入了频率跟踪的闭环控制可以将电机的速度变化稳定在5%以内。
5 结 语
超声波电动机的运用离不开驱动器,并且在很大程度上驱动器性能的优劣决定了超声波电动机的发展。近年来,国内外超声波电动机领域的研究人员在驱动技术方面取得了很多进展,包括基于DDS技术的信号发生器、压电变压器、LLCC谐振升压电路等。从驱动控制的角度来讲,驱动器应该要结合超声波电动机本身相对传统电磁电机的优势去设计,并且向着微型化、集成化、通用化、充分利用数字技术向数字化和智能化的方向发展。
[1]赵淳生.超声电机技术与应[M].北京:科学出版社,2007.
[2]胡敏强,金龙,顾菊平.超声波电机原理与设计[M].北京:科学出版社,2005.
[3]曾劲松,姚志远,赵淳生.超声电机的非线性现象研究[J].中国机械工程,2006,17(10):1047-1050.
[4]龙涛元,宋国翠,杨立宏.高效超声电机驱动电源研究[J].电工电气,2010,(12):21 -24.
[5]傅平,郭吉丰.超声波电机驱动器的发展现状[J].中国电器工业协会微电机分会第五次会员代表大会暨企业名牌战略与微电机技术发展论坛论文汇编.2007.
[6]姜楠,方光荣,刘俊标,等.国内外超声波电动机驱动技术的最新进展[J].微特电机,2005,33(9):38 -41.
[7]周凯.反激DC-DC变换电路研究[D].华中科技大学,2008.
[8]袁世明,周铁英.高性能超声电机驱动及控制电路的研制[J].电子技术应用,2003(4):32-34.
[9]周斌,李志钧,赵淳生.基于DDS的超声电机驱动电源[J].压电与声光,2002,24(3):202 -204.
[10]张瑞.超声波电机谐振驱动控制技术研究[D].河南科技大学,2009.
[11]曲建俊,邓静.多功能通用型超声电机驱动系统研究[C]//第十三届中国小电机技术研讨会论集.哈尔滨,2008:293-301.
[12]张文科.超声波电机频率自动跟踪与负载匹配技术[D].华南农业大学,2007.
[13]赵先锋.专用超声波电机驱动电路研究[D].中国工程物理研究院通信与信息系统系,2005.
[14]孙中记.一种具有频率自动跟踪功能的超声波电机驱动电源设计[D].浙江大学,2008.
[15]祖家奎.行波型超声电机电学特性与驱动控制研究[R].南京航空航天大学博士后研究工作报告,2004.
[16]李华峰,王红占,黄卫清.控制量独立可调的超声电机新型驱动器[J].电机与控制学报,2010,14(9):88 -92.
[17]史敬灼,王海彦.驱动超声波电机的推挽式变换器工作过程分析[J].电机与控制应用,2009,36(1):1 -4.
[18]刘震,孙永魁,耿海.基于输出电压可调的LLC谐振变换器的设计与优化[J].真空电子技术,2010,(3):49-52.
[19]朱立泓.LLC谐振变换器的设计[D].浙江大学,2006.
[20]裴帮富,韩金玲.超声波电动机推挽驱动电路的优化[J].微特电机,2009,37(4):11 -13.
[21]顾菊平,胡敏强,石斌,等.超声波电机谐振升压式驱动技术研究[J].中国电机工程学报,2002,22(8):49 -52.
[22]李华峰,赵淳生.基于LC谐振的超声电机驱动器的研究[J].中国电机工程学报,2005,25(23):144 -147.
[23]史敬灼,侯义铭.超声波电机低成本驱动电路[J].电气传动,2007,37(1):62-64.
