基于旋转高频电压注入的对转PMSM无传感器控制
2012-07-23徐海珠谢顺依王松林
徐海珠,谢顺依,王 鼎,王松林
(海军工程大学,湖北武汉430033)
0引 言
对转永磁同步电动机[1]功率密度高、转矩脉动小;径向拉力小、无陀螺效应,有两个机械输出端口,可直接驱动对转螺旋桨推进系统,在水下电力推进领域广泛应用[2]。
对转永磁同步推进电动机由一个定子和两个永磁转子组成,如图1所示。外转子和内转子分别安装径向磁化的永磁体,定子两侧安装螺线管绕组,绕组端部大大缩短,电机效率和功率密度大幅提高[3]。

图1 对转永磁同步电动机的结构
电枢内外两层绕组相序相反[1],在绕组两侧产生等大而反向旋转的磁场,进而在两个转子上产生等大而反向的电磁转矩。
在矢量控制和直接转矩控制等高性能控制系统中,为了实现精确控制,位置、速度信息必不可少[4],通常需要在转子轴上安装机械传感器。对转永磁同步电动机有两个转子,至少需要六套霍尔传感器和六个馈电环,才能得到转子的准确位置,这使电机增加了体积、成本和复杂度,降低了可靠性和使用范围。为了克服机械式传感器带来的缺陷,学者开展了无机械式传感器系统的研究[5]。其中旋转高频电压注入法结构简单、鲁棒性强,在全速度域内能获得较高的跟踪精度,应用最广泛[6]。
文献[7]探讨了内转子—外转子式永磁电机的控制策略,这种电机只是使传统永磁电机的定子旋转起来,故其控制系统与传统永磁电机没有本质差别。文献[8]探讨了对转永磁同步电动机的电磁模型和工作原理。但已有文献中关于对转永磁同步电动机控制策略的研究很少,特别是当推进器受到扰动时,两转子转速发生差异,航行器易发生陀螺效应,限制了其在精密航行器上的应用。因此研究对转永磁同步电动机的控制策略,维持其等速对转特性,消除陀螺效应,对水下电力推进有重要意义。
本文针对凸极对转永磁同步推进电动机稳态时双转子转速相等的特点,设计了一种基于高频旋转电压信号注入的转子位置检测方法,可在全速域内完成对转永磁同步电动机的无传感器控制,同时实现双转子的转速跟随。
1无传感器控制原理

式中:Ud、Uq、id、iq为电机 dq 轴电压和电流;p 表示对时间的导数;Ld1、Lq1为内转子的 dq轴电感;Ld2、Lq2为外转子的 dq轴电感;Ψf1、Ψf2、ω1、ω2分别为内外转子的永磁磁链和机械角速度;Rs为内外电机的电阻。
设基波电压和高频电压幅值分别为Vf、Vh,频率分别为ωf、ωh,则对转永磁同步电动机的输入总电压由两者合成。因为高频旋转下ωf≪ωh,电机反电势主要由电感提供,即:

电机在每一个极距范围内只呈现出一个空间凸极,由式(1)可得在基波频率同步旋转的坐标系中,高频电压激励下,对转永磁同步电动机的电流响应为[1,6]:

分母中也包含和位置有关的信息sin 2(θ1-θ2),但其幅值太小,可忽略。可得式(4):

式中:θh=ωht,θh为高频注入电压旋转角。高频注入电压被内转子和外转子凸极分别调制,因此可将电流分解为内转子调制电流和外转子调制电流。

式中:
Ip1为内转子调制电流的正序部分,与高频注入电压同方向旋转;In1为内转子调制电流负序部分,与高频注入电压反方向旋转。同理,Ip2为外转子调制电流正序部分;In1为外转子调制电流负序部分。
由式(5)可知,只有高频电流负序分量的相位中包含转子位置θ1和θ2信息。
根据《山西省太谷县城市饮用水水源保护区划分技术报告》保护区划分结果,庞庄水库一级水域为取水口半径300 m范围内区域,保护面积0.079 5 km2,保护区周长1 298 m;二级水域为一级保护区以外的水域,保护区面积0.74 km2,保护区周长7 255 m;一级陆域为正常水位线942 m以上200 m范围的陆域,保护区面积2.4 km2,保护区周长24 225 m;二级陆域为水库上游周边山脊线以内及入库河流上溯3 000 m的汇水区域,保护区面积56.25 km2,保护区周长25 286 m。
2转子位置观测器
凸极对转永磁同步电动机的输入电压中包含旋转高频电压矢量时,其电枢响应电流主要有基频电流、高频响应电流、高频PWM开关谐波电流。经过低通滤波器(LPF)可得到基频电流进入电流控制器。只有高频响应电流中的负序分量含有凸极位置信息,锁定即可得到转子位置信息。从定子电流信号中提取转子位置信息包括五个步骤:
(1)采用带通滤波器(BPF)得到高频响应电流。
(2)采用同步轴系高通滤波器(SFF)去除响应电流中的正序分量。SFF将高频响应电流转换到一个与高频电压信号同步旋转的坐标系中,正序电流信号变成一个直流信号,用高通滤波器滤除。

(3)通过坐标变换将载波电流的负序分量变换 到负序载波信号同步参考坐标系中,从而去除负序分量中的高频分量。

(4)利用锁相环(PLL)得到两个转子位置信息。稳态时两个转子转速大小相等,可以通过锁相环滤去电流中幅值较小的高阶分量,得到电机两个转子的角频率ω,积分后可得两个转子的位置估计值,如下:

式中:p、q为负序电流的基波正弦、余弦分量;r、s为二次谐波正弦、余弦分量;为内转子、外转子位置的估计值;为内转子、外转子位置的初始值。
(5)利用外差法得到两个转子的位置误差ε1、ε2,跟踪即可得到转子位置的实际值。转子位置观测过程如图2所示。

图2 转子位置观测过程
3无传感器控制系统
对转永磁同步推进电动机中,内外电机的电枢串联,仅控制电枢电流就可控制双转子的转速。矢量控制系统采用转速、电流双闭环控制,内环电流采用id=0控制,外环为转速控制。当电机受到瞬时扰动时,两转子负载不等,因而转速产生差异,电机发生陀螺效应。系统对两转子采用相同的参考转速,分别进行PI调节;采用外转子转角进行矢量变换,让内转子转速跟随外转子转速,保证电机扰动后两个转子转速迅速恢复相等。控制系统如图3所示。

图3 对转永磁同步电动机无传感器控制系统结构
4仿真结果及分析
对转永磁同步电动机及无传感器控制系统仿真模型的参数如下:磁通 0.185 Wb,电阻 0.4 Ω,交、直轴同步电感 8.5 mH,转动惯量 0.015 kg·m2,极对数为6,额定转速1 000 r/min,逆变器输入直流电压310 V,频率为20 kHz。基频电压为100 Hz,高频注入电压频率为750 Hz,幅度为基波幅度的1/10。其带通滤波器的通带设置在600 Hz和900 Hz之间。
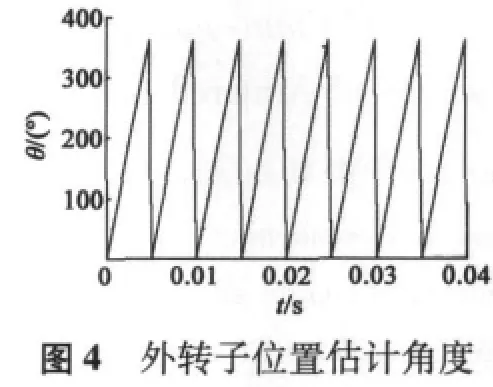
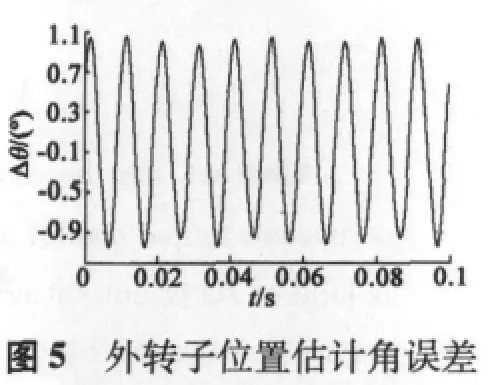
(1)位置估计。空载下电机分别以高速(1 000 r/min)、低速(300 r/min)旋转。高速时具有较好的辨识速度和精度,低速时位置估计及误差如图4和图5,可见转子位置估算比较准确。
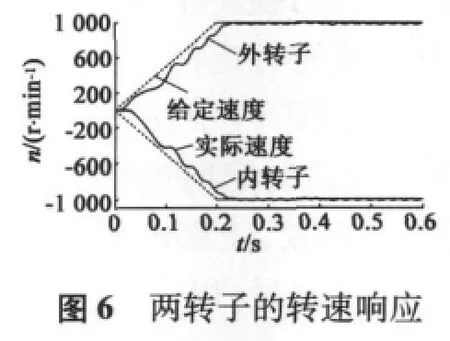
(2)转速响应。仿真持续0.6 s,模拟电机扰动。0.1 s设置两转子的负载为[8,14]N·m,在0.2 s时负载突降为[3,5]N·m,0.4 s时负载骤增为[25,15]N·m,得到如图6所示的电机给定转速和实际转速曲线。可见瞬态时转速估计有一定误差,稳态时转速估计较为精确。
刚起动时,由于两转子负载差异,且控制策略还没有发挥作用,两转子转速差异较大,但在相同的参考转速和内外转子转速跟随的条件下,0.25 s后,两个转子转速差异减至8 r/min,负载骤增时最大转速差为15 r/min,仅为额定转速的1.5%,如图7所示。

5结 语
本文设计了一种基于高频旋转电压注入的转子位置检测方法,可在全速域内实现对转永磁同步电动机的无传感器控制,设计了双转子的转速跟随测量,可以使对转永磁同步电动机在扰动下抑制陀螺效应。结果表明,该方法结构简单、响应迅速;实时性强,可靠性高,具有广阔的应用前景。
[1] Chen Jinhua,Zhang Fengge.Design and finite element analysis on a novel PMSM with anti-rotation dual rotors[C]//Proceedings of the IEEE on Automation and Logistics.Shenyang,China,2009:315-319.
[2] Atsushi I,Hiroyasu S.Magnetic characteristic analysis of dual-rotor machines[C]//Proceedings of the 12th ISEM Bad Gastein.2007,25:173-177.
[3] Gottipati P.Comparitive study of double rotor permanent magnet brushless motors with cylindrical and disc type slot-less stator[D].Louisiana State University,Baton Rouge,2007.
[4] 王江涛,刘海琴,王剑.新型永磁同步电动机无传感器智能控制系统[J].微特电机,2010(8):50-53.
[5] 何苗,刘政华.基于DSP的无传感器永磁同步电机控制器设计[J].微特电机,2010(10):63-67.
[6] 王丽梅,郭庆鼎,郑建芬.基于高频信号注入法的永磁同步电动机无传感器控制[J].沈阳工业大学学报,2004,26(6):648-651.
[7] Xiao Rujing,Yang Xiangyu.Simulation and analysis on novel dual rotor permanent magnet synchronous motor[C]//IEEE Int.Conf.on ICECE.Wuhan,2010:4204-4207.
[8] 赵峰,温旭辉,刘钧.永磁-永磁型双机械端口电机系统建模[J].中国电机工程学报,2007,27(21):59-65.
[9] Qu Ronghai,Lipo T A.Dual rotor,radial flux,toroidally wound,permanent-magnet machines[J].IEEE Trans.on Industry Applications,2003,39(6):1665-1673.?
