一种新型低耦合双余度PMSM的设计及仿真分析
2012-07-23周广伟李声晋周奇勋
周广伟,李声晋,卢 刚,周奇勋,周 勇
(西北工业大学,陕西西安710072)
0引 言
随着稀土永磁材料和电机理论的进一步发展,永磁同步电机(以下简称 PMSM)以其高磁能积(BH)、高矫顽力(Hc)和大剩磁密度(Br)而被广泛应用于对系统可靠性要求较高的航空、航天领域[1-2]。尤其是在飞机电动舵机、发动机油门控制等重要、复杂且不允许停机运行的伺服系统中,其可靠性设计至关重要[3]。为提高飞控系统的可靠性,一般均采用包括并联和串联两种结构形式的双余度配置方式。其中,串联结构双余度PMSM是将两套独立的定子和转子共轴安装,其体积和重量较大,余度间难以协调控制;并联结构双余度PMSM虽然解决了体积和重量偏大的问题,但其双绕组间存在的互感影响,增加了系统参数变化的不确定性[4]。因此本文在基于槽号相位图和单套绕组设计经验的基础上,提出了一种新型低耦合并联结构双余度PMSM的设计方案,从而减小双绕组间互感的影响,降低两套绕组间的耦合度,提高PMSM的控制性能。
1低耦合双余度PMSM双绕组结构设计
传统并联结构双余度PMSM的两套绕组隔槽嵌放于电机的定子槽内,两绕组在空间上的交叉重叠将产生较大的互感,严重影响电机的控制性能[5]。为减小双绕组间互感的影响,本文设计了一种新的绕组空间分布结构,将原本重叠嵌放的两套绕组分开,分别嵌放在电枢铁心的上、下半周槽内,其结构如图1所示。其中,1号绕组分布在PMSM电枢铁心的上半圆周(图中的1~12槽),2号绕组分布在电枢铁心的下半圆周(图中的13~24槽),两绕组在空间相互隔离,减小了互感的影响。

图1 新型双绕组分布结构示意图
双绕组PMSM包括并行/主动和工作/备份两种典型的余度模式。其中,并行/主动模式因其在故障状态可实现故障的无缝切换,因而更适合于舵面、襟翼等瞬时负载重、实时性要求高的场合[6-7]。本文所设计的是机载电动静液作动器(Electro-Hydrostatic Actuator,以下简称EHA)用低耦合双余度PMSM,因此,采用并行/主动余度工作模式。图2~图3分别是1号和2号单层叠绕组的嵌放示意图,正常情况下两余度同时工作(即双余度工作模式),等额分担负载。当某余度出现故障后,此余度将被切除,负载将由另一余度单独承担(即单余度工作模式)。为验证所设计的新型低耦合双余度PMSM的性能,利用电磁有限元分析软件Ansoft12对其双余度和单余度两种工作模式进行仿真分析。


2低耦合双余度PMSM的主要性能分析
根据上述所设计的新型低耦合双余度PMSM的双绕组分布结构及其连接方式,利用Ansoft 12的RMxprt模块对其主要性能进行仿真分析,电机的主要设计参数如表1所示。

表1 低耦合双余度PMSM的主要设计参数
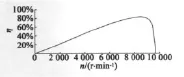
图4 双余度工作模式下PMSM的效率与转速的关系曲线
将表中数据录入到RMxprt模块,分别对其双余度工作模式和单余度工作模式的效率/转速和母线电流/转速的关系进行分析,相应的特性曲线如图4、5所示。由图4、图5可知,双余度工作模式下PMSM的额定转速为8 256r/min,其所对应的效率为82.78%,完全满足机载EHA的额定性能要求;单余度工作模式下电机的总损耗减少,效率高达86.12%,但其额定转速明显下降,6 743 r/min的额定转速虽会导致机载EHA的频响性能略有下降,但仍满足机载EHA的降额限制要求。正常情况下PMSM工作在双余度工作模式,由图6~图7可知,其每套绕组的工作电流远小于单余度工作模式下绕组的母线电流,相当于每套绕组工作于轻载状况,进一步提高了系统的可靠性。
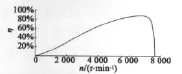
图5 单余度工作模式下PMSM的效率与转速的关系曲线

图6 双余度工作模式下PMSM的母线电流与转速的关系曲线

图7 单余度工作模式下PMSM的母线电流与转速的关系曲线
3低耦合双余度PMSM二维瞬态磁场的有限元分析
电机旋转过程中,磁场、能量、力、功率损耗、速度等物理量都是时间的函数[8],为验证所设计的新型低耦合双余度PMSM空载起动性能、负载起动性能和运行过程中的磁路特性是否合理,需对其进行瞬态分析。采用Maxwell 2D对PMSM进行瞬态磁场分析时,需做以下假设:Band为一个包括永磁磁钢、转子铁心和转轴的集合体;Band以外的物体静止;Band以内的物体只做旋转运动。
3.1低耦合双余度PMSM二维模型的构建
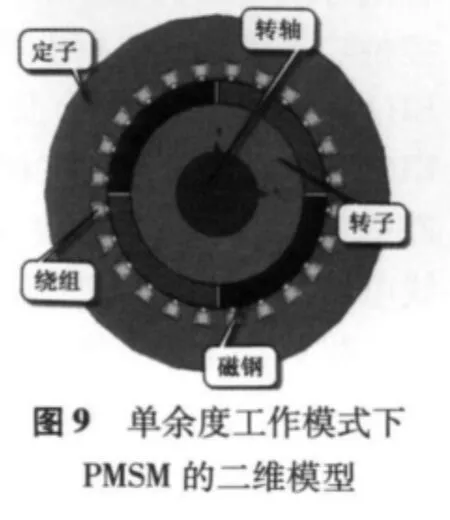
双余度工作模式的PMSM,因其上、下半周余度完全对称,为降低Maxwell 2D的运算量、减少仿真时间,采用半圆周作为求解区域,其二维模型如图8所示。而单余度工作模式的PMSM,因其上、下半周余度的非对称性,对其瞬态磁场进行分析时,必须采用整个圆周作为求解区域,其二维模型如图9所示。
3.2低耦合双余度PMSM网格剖分的设置
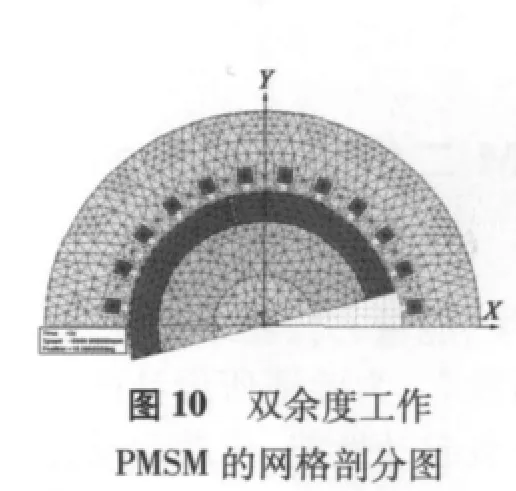
网格剖分是有限元求解最为关键的一步,良好的网格剖分可以使得用户在最小的计算资源下拥有最精确的计算结果。Ansoft 12对求解场域的剖分采用三角形六节点形式,在场强较强或磁场变化较大的区域,三角形要取得多一些,在其他区域则可以适当取得少一些,从而提高区域的求解精度和运算速度。两种工作模式下PMSM的网格剖分数据如表2~表3所示,其网格剖分结果如图10~图11所示。

表2 双余度工作模式下PMSM的网格剖分数据

表3 单余度工作模式下PMSM的网格剖分数据

3.3低耦合双余度PMSM边界条件的确定
单余度工作模式下PMSM以整个圆周为求解区域,其边界条件由第一类边界条件(定子铁心外边界与转子铁心内边界)和第二类边界条件(电机单元划分时所形成的奇、偶对称边界)构成。双余度工作模式下PMSM以半圆周为求解区域,其边界条件除第一类和第二类边界条件外,还须设置主、从边界,且满足Master= -Slave。
3.4低耦合双余度PMSM激励电路的设计
低耦合双余度PMSM定子绕组激励电路由两套完全相同且独立的驱动控制电路构成。驱动电路直流母线电压为270 V,母线电流取则决于三相全控桥功率模块。根据电机的额定功率,并结合机载EHA的瞬时过载能力及其余量的选取,最终选择EUPEC的集成三相全控桥 IGBT模块FSK200R06KE3,该模块在80℃时可承受的最高母线电压为600 V,允许通过的最大电流为200 A,满足机载EHA的控制性能要求。利用Ansoft 12自带的Maxwell Circuit Editor模块设计的单套绕组电流斩波控制电路如图12所示。

图12 单套绕组电流斩波控制电路
3.5负载起动特性分析
双余度PMSM作为机载EHA的驱动机构,必须具有较好的动态响应性能,但在分析PMSM的负载起动性能时,如果对输入电流不加控制,势必造成起动瞬间出现过大的起动电流,这与实际情况不符。实际工作电流由机载电源提供,为了减小对电源的冲击,不影响同一电源下的其它负载工作,必须对PMSM输入电流进行限制。本文采用绕组电流斩波控制的方法,斩波电流上限设置为150 A,并取计算步长为2×10-5s,负载转矩为5 N·m,分别对双余度工作模式和单余度工作模式的低耦合双余度PMSM的额定负载起动特性进行分析。
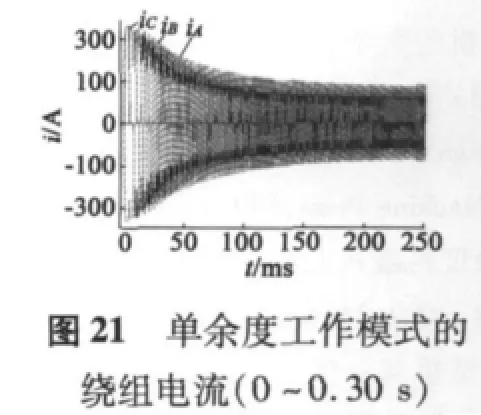
图13~图18为双绕组工作的PMSM起动过程的瞬态仿真结果,由图可知,PMSM在绕组斩波电流150 A的限制条件下,可在0.2 s内将5 N·m的负载拖动至8 000 r/min,完全满足机载EHA的快响应要求,同时,电流、磁场波形接近正弦波,转矩脉动较小
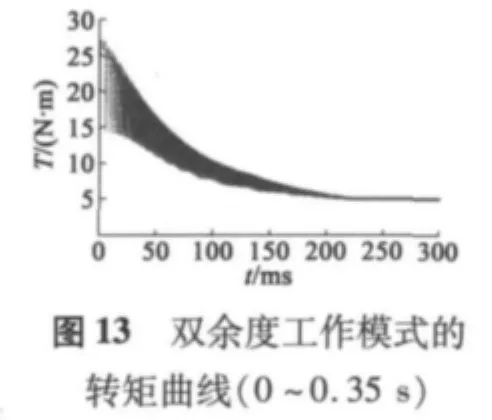
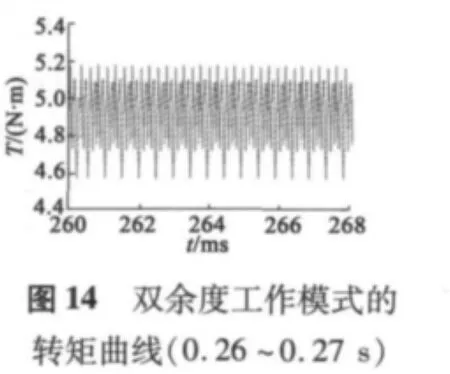

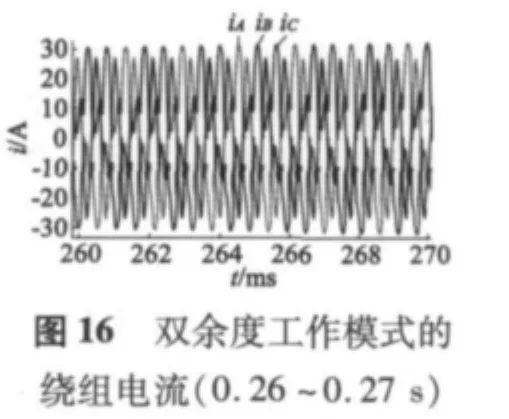


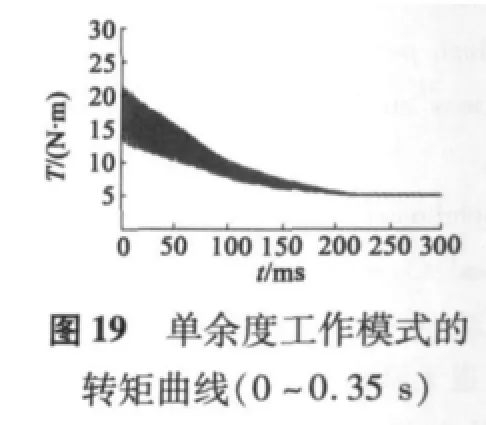
图19~图22为单绕组工作的PMSM起动过程的瞬态仿真结果。其中,单绕组工作的PMSM起动力矩为双绕组工作时的75%以上,满足机载EHA的降额限制要求;三相绕组电流不完全对称且存在一定的波动,但其所导致的转矩脉动仍在合理的可控范围内,此高频转矩脉动对机载EHA这种液压类大惯性负载的影响较小,完全满足其基本性能要求。


3.6铁心磁饱和特性分析
双余度工作模式和单余度工作模式下的PMSM的定、转子磁感应强度和磁场强度分布如图23~图26所示。由图可知,两种工作模式下PMSM的定、转子铁心均未达到磁饱和,在负载电流允许的情况下,其铁心损耗在可控范围内,电机旋转过程中,不会出现磁饱和的现象。


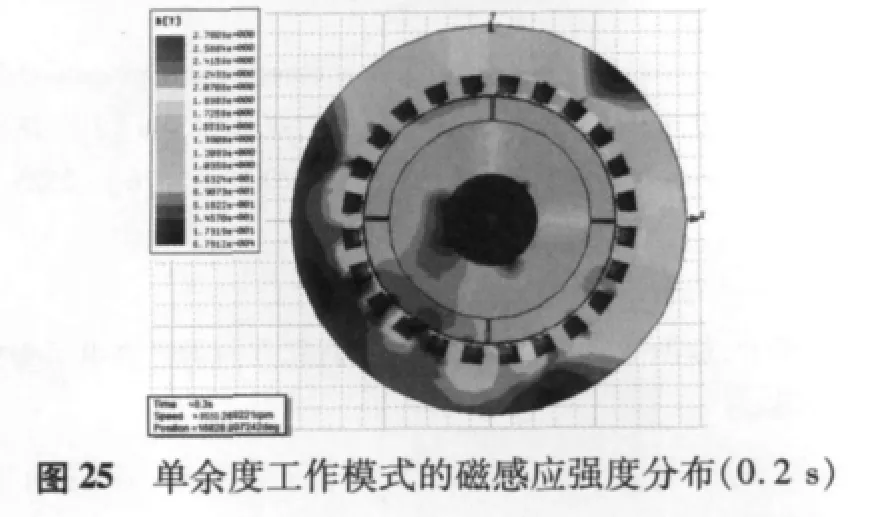

图26 单余度工作模式的磁场强度分布(0.2 s)
4实 验
为验证本文所设计的低耦合双余度PMSM能否满足机载EHA的性能要求,利用为EHA提供负载的液压负载台和调节EHA负载大小并实时显示负载力矩的负载操作台对其负载响应速度和平稳性能进行测试,试验平台如图27所示,施加的负载额为12 kN,作动位移为-40~+40 mm。

图27 机载EHA的试验平台
图28~图30分别为PMSM在双余度和单余度工作模式下机载EHA的负载响应速度曲线。由图可知,双余度工作模式下作动系统从-40 mm位置运动到+40 mm位置所需时间为0.672 s,负载响应速度可达119.1 mm/s,超调量为0.45%。单余度工作模式下1#余度运行时负载响应速度为114.3 mm/s,超调量2.88%;2#余度运行时负载响应速度为116.6 mm/s,超调量2.98%。试验证明,本文所设计的新型低耦合双余度PMSM的两种工作模式均完全满足机载EHA的快响应和平稳性要求。
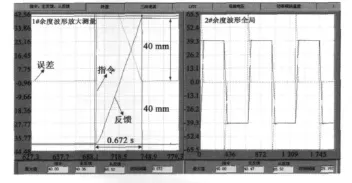
图28 双余度工作模式下作动系统的阶跃响应曲线

图29 仅1#余度工作时系统的阶跃响应曲线

图30 仅2#余度工作时系统的阶跃响应曲线
5结 语
机载EHA用新型低耦合双余度PMSM结构简单,绕组间互感较小,在保证系统可靠性的同时提高了其控制性能,完全满足机载EHA的快响应和稳定性要求。仿真和实验结果进一步证明,本文所提出的新型低耦合双余度PMSM的设计方法合理、可行,具有较高的推广价值。
[1] Kobayashi K.The proceeding of high performance magnets and their applications[J].IEEE Transactions on Magnetic,2004,40(8):499-501.
[2] Zhu Z Q.Permanent magnet synchronous motor for consumer products[C]//The 9th International Conference on Electrical Machines and Drives.1999:118-122.
[3] 董慧芬,周元钧,沈颂华.双通道无刷直流电动机容错动态性能分析[J].中国电机工程学报,2007,27(21):89-94.
[4] 周元钧.双绕组无刷直流电动机的数学模型与转矩控制特性[J].电工技术学报,2004,19(3):12-16.
[5] Tang Renyuan.Theory and design of modern permanent magnet machines[M].Beijing,China Machine Press,1997:132-136.
[6] 周奇勋,李声晋,卢刚,等.双余度机载永磁无刷直流伺服系统转矩均衡性[J].电工技术学报,2009,24(6):17-23.
[7] 李军,付永领,王占林.一种新型机载一体化电液作动器的设计与分析[J].北京航空航天大学学报,2003,29(12):1101-1104.
[8] 刘瑞芳,严登俊,胡敏强.永磁无刷直流电动机场路耦合运动时步有限元分析[J].中国电机工程学报,2007,27(12):59-64.
