扫描成像跟踪激光雷达
2012-10-30屈恒阔张清源阮友田
屈恒阔 ,张清源,阮友田
(中国电子科技集团公司 第二十七研究所,河南 郑州450047)
1 引 言
激光雷达从功能上可分为激光测角和跟踪激光雷达、扫描成像跟踪激光雷达。近年来,随着高重频二极管泵浦( DPL) 激光器、光纤激光器、多元阵列探测、高速扫描器等技术的飞速发展,激光成像的帧频和分辨率以及跟踪性能都有了明显的提高,在对目标精密智能跟踪方面极具潜力[1]。
与红外和可见光成像相比[2],激光成像具有显著的优点:(1) 抗电磁干扰能力强,不容易受环境温度和阳光变化的影响; ( 2) 具有较高的距离、角度和速度分辨率,能同时获得目标的多种图像,图像信息量丰富,更适用于目标识别[3];(3) 与四象限探测点跟踪系统相比,成像跟踪具有目标识别能力强且跟踪精度高的优势。
扫描成像跟踪激光雷达可采用单元探测器的扫描成像和多元阵列探测器的非扫描成像等工作体制,两者各有优缺点。目前以采用单元探测器的扫描成像技术较为成熟。扫描成像跟踪激光雷达兼具成像侦察和目标捕获跟踪的能力,在直升机机载防撞、空间监测、空间维护、空间对抗、火控雷达、夜间侦查等诸多方面具有广泛的应用。
本文设计了一种基于激光图像跟踪的激光雷达系统,分析了系统的组成和关键技术,进行了系统的性能测试,并给出了测试结果。
2 原理及关键技术
图1 为扫描成像跟踪系统的原理框图。系统由激光发射/接收系统、激光发射/接收光学系统、图像处理单元、伺服机构、总控计算机等部分组成。其中激光发射/接收系统由激光器及其驱动源、探测器、放大电路等部分组成。

图1 扫描成像跟踪系统组成原理框图Fig.1 Structure graph of scanning image tracking system
扫描成像跟踪系统的工作过程如下: 首先由控制计算机通过时序控制电路控制时序,驱动激光器发射激光脉冲序列,激光脉冲经过发射光学整形后,由扫描系统偏转光束方向后再照射目标区域,形成排列紧密的扫描覆盖。二维扫描机构采用双向三角波扫描,行电机沿水平方向运动,完成方位方向探测区域的覆盖。帧电机沿垂直水平方向运动,完成俯仰方向探测区域的覆盖,从而完成整个空域的探测。二维电机的扫描经修正后,脉冲序列按照时序约定与扫描视场的位置线性对应。当激光脉冲照射目标后,目标表面对激光的漫反射回到扫描系统,经接收系统处理后照射到探测器,形成光电流,通过信号处理得到目标的距离。图像处理电路按照时序约定排列回波信号,得到目标的距离图像[4],当完成一幅图像后,通过图像处理对目标进行分析,判断跟踪整幅图像内的某个目标,计算出跟踪目标中心与扫描中心的偏差量,伺服机构根据此偏差量和目标的角速度不停地改变扫描中心,达到实时跟踪的目的。同时根据计算结果输出目标的相对距离和相对视线角。
系统有动态图像跟踪和静态图像监测两种工作模式。在动态图像跟踪模式下,系统捕获角度为10° ×10°,跟踪目标后扫描角度为1° ×1°,像素为30 pixel ×30 pixel,帧频为4 Hz。当系统需要对目标进行详细观测时,可通过提高扫描频率和激光重频获取更高分辨率的三维目标图像。跟踪模式下可由外部控制实时转换为静态扫描成像模式。本设计方案中,系统不仅具备对目标的测量能力,同时具备了一定的侦察能力。
扫描成像跟踪激光雷达系统除了关注激光器和探测器的指标( 如激光脉宽、重复频率、单脉冲能量、探测器件灵敏度等) ,还要关注影响整机使用的目标搜索、捕获、图像处理和跟踪算法等关键技术。为了获取较好的探测效果及较高的图像质量,在选择光源时尽量选取单模且光束质量因子高的激光器,本系统采用KOPASYS 公司的光纤激光器[5],其光场模式为LMA 单模,光束质量因子为1.3。激光的波束不但窄,而且分辨率高,但用窄波束激光实现对目标的搜索和捕获是成像跟踪激光雷达系统的技术难点之一。通常扫描成像跟踪激光雷达安装在移动平台上,探测目标同样处于移动状态,因此需要考虑两个平台运动的相对视线角度、角速度、速度、激光重频、光斑覆盖率、扫描速度等多种因素。
为了更直观地描述激光成像探测系统所测量的信息,需要将被测对象的测量数据以图像形式显示出来,并对其进行处理和分析。图像处理按基本功能特征可以分为采集、显示、存储、通讯、处理和分析模块。采集模块完成图像像元信息的获取;显示模块是按用户需要显示所关心的目标图像信息;存储模块存储所采集的信息,以供事后分析处理;通讯模块完成多系统之间的信息交换;处理和分析模块则针对采集的信息进行过滤、处理、分析,提取相关可用信息。采用光机扫描形式成像时,需对其图像获取、数据修正映射等进行研究。
3 系统实现
根据激光成像探测系统的特点,综合考虑其搜索效率、搜索速度、实现难易程度、对图像的影响程度、重量功耗、成本等多方面因素,采取了检流计式搜索和光栅式扫描[6]方式。
3.1 光斑重叠率要求
为了防止扫描过程中目标从未扫描区域移到已扫描区域而丢失目标,相邻两点尤其相邻两行应具有一定的光斑重叠率,才能满足系统捕获目标的要求。假定脉冲间隔时间为TP,行间隔时间为TL,目标运动速度为v,最坏情况目标运动速度与扫描方向相反,dP为一行内两脉冲点中心距,dL为行间距,D为光斑尺寸。对于图2 所示的矩形光斑,运动目标应满足如下条件:

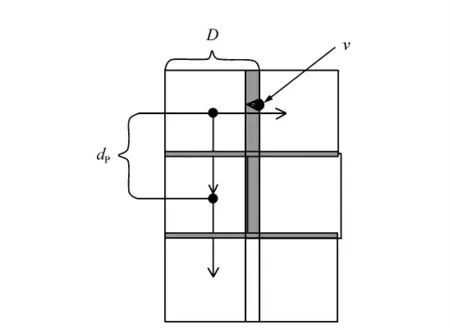
图2 光斑重叠率要求Fig.2 Demand of facula overlap
所以,有:

设KP为行内光斑间的重叠率,KL为行间重叠率,则:

根据式(2) 和式(3) ,激光采用图像扫描目标时,光斑的重叠率应满足以下条件:

系统的光斑重叠率是针对目标最大运动速度而设计的,无需随目标运动状态的不同而设计不同的光斑重叠率。
3.2 图像处理
激光成像探测系统得到的图像数据是包括二维坐标和距离的三维图像,对这种图像的显示采用三维伪彩色图像显示方法,其中二维坐标为角度信息,不同颜色表示远近不同的距离。用红色表示最近距离,用蓝色表示最远距离,共256 种颜色。
由于二维振镜扫描固有的特性,光学扫描角与机械扫描角存在一定的非线性,使扫描图样出现一定畸变,这种畸变随着扫描角度和扫描速度的增大而增大[7]。由于帧扫速度慢,扫描的非线性可以忽略,而行扫速度快( 25 Hz) ,因此,图像的畸变主要出现在水平方向,行电机的非匀速正扫和逆扫均会导致图像出现畸变。这种畸变校正对于不同的方位、俯仰角,其畸变量是固定的,可以预先计算,用查表的方式进行修正。
典型的激光雷达平面图像如图3 所示。

图3 某水塔典型的激光雷达图像Fig.3 Typical lidar image of water tower
3.3 跟踪算法
对目标的跟踪算法直接关系到系统的跟踪性能,结合系统的应用环境,系统选择质心跟踪算法作为对目标的跟踪算法。
当选定目标后,系统根据目标的速度、大小、距离等综合信息使用适当的波门框住目标,只处理波门内的图像数据,节省了大部分背景的计算,压缩了处理数据量。质心跟踪算法[8]采用质心坐标法来确定目标的质心,其质心坐标表达式为:

式中:当像元的信息值小于系统阈值时,Uij=0;当像元的信息值大于系统的阈值时,Uij=1。xi和yj分别为x方向的第i个坐标和y方向的第j个坐标。m和n分别为x和y方向上的分辨像元数。
采用质心算法跟踪可以达到很高的位置分辨率,而且算法处理快,有利于系统的快速处理和快速跟踪。
4 试验方法与结果
4.1 静态扫描
系统对距离960 m 左右的水塔进行了静态成像,图4( a) 为水塔的CCD 图像。采集扫描数据对激光雷达的原始图像进行了插值、对比度增强、滤波等处理。由原始数据可知,原始图像中水塔距离为[960,970 m],若直接采用距离和颜色映射方式,通过二次插值和滤波处理后,显示的图像如图4( b) ,所探测的水塔面呈水平面,反映不出水塔探测曲面的真实走向。采用对比度增强处理后,显示的图像如图4( c) ,可以看出,图像增强后显示的水塔形状与真实水塔结构一致,能够体现水塔外形结构。

图4 水塔图像Fig.4 Images of water tower
4.2 动态跟踪能力
激光雷达安装于U 型伺服转台上,初始时伺服转台以0.4( °) /s 的速度对距离约500 m 的目标气球进行5° ×5°范围的反复运动、探测( 见图5) ,经多次测试,激光雷达均能在5 s 之内捕获目标。当激光雷达捕获目标后伺服转台以1.2( °) /s的速度转动,仍能稳定跟踪目标。

图5 目标气球实时跟踪图像Fig.5 Real time tracking image of air balloon
4.3 精度测试
激光雷达跟踪距离900 m 的静态目标时,伺服转台作为第三方测试系统对激光雷达的角精度和角速度精度进行评价。精度测试结果见图6 和图7。经测试,工作视场为50° ×50°,该系统距离精度优于0.25 m,角精度可达到0.07°。

图6 距离精度测试数据图Fig.6 Graph of distance precision
影响系统测距精度的主要因素是激光回波信号提取的时延误差,在后续的改进工作中可加入恒比定时电路,预计精度将提高近10 cm;而影响系统角跟踪精度的主要因素是激光图像的分辨率以及由于高速扫描系统扫描呈非线性带来的误差,在后续的改进工作中可通过减小激光束散角、增加激光重频或者采用阵列探测器的方式来提高图像分辨率。扫描系统的非线性可通过数据拟合进行非线性修正,或者采用更高扫描能力的扫描系统,预计精度将提高近0.05°。

图7 角精度测试数据图Fig.7 Graph of angle precision
5 结 论
本文对激光图像雷达系统的组成和关键技术进行了详细的分析,同时进行了系统的性能测试,本项工作对激光图像跟踪雷达的设计和研制具有重要的指导意义。该系统已通过长达200 h 的烤机试验,并参加过多次野外试验,经各种试验考核,该系统性能稳定,具有一定的工程应用价值。另外通过对扫描成像跟踪雷达的深入研究,未来激光成像雷达系统拟在以下方面进行探索:
(1) 提高激光雷达的探测能力。采取直接探测体制是当前激光主动探测的主流,为提高系统的作用能力和探测概率,要发展相干探测体制;
(2) 提高激光成像雷达成像帧频和图像分辨率。帧频数的提高将直接提高激光雷达的跟踪能力,需要在高重频激光辐射源、灵活快速扫描机构等方面进行攻关,从而达到实时扫描的效果。另外国内外已经开展了多元或阵列凝视激光成像探测系统的相关研究,该技术一旦成熟,必将极大地推动激光成像雷达系统的发展。
(3) 针对激光主动成像特点进行有效的图像处理和评判。激光图像不同于CCD 图像,它不仅具有强度、角度等信息,还包括距离量信息,但其3D 伪彩色的显示方法信息量过于丰富,不利于图像的判读,可借鉴CCD 图像处理方法以及与CCD图像相融合来加强激光图像的可读性。
[1] 周娜,安志勇,谭清中.基于激光雷达的形面打描技术研究[J].光学与光电技术,2011,9(5) :58-60.ZHOU N,AN ZH Y,TAN Q ZH. Research on profile measurement technology based on the laser radar[J].Optics&Optoelectronic Technology,2011,9(5) :58-60.( in Chinese)
[2] 熊辉丰.激光雷达[M].北京:宇航出版社,1994.XIONG H F.Laser Lidar[M]Beijing:Aerospace Publishing House,1994.( in Chinese)
[3] 孟庆季,张续严,周凌,等.机载激光3D 探测成像系统的关键技术[J].中国光学,2011,4(4) :213-232.MENG Q J,ZHANG X Y,ZHOU L,et al.. Key technologies of airborne laser 3D detection imaging system[J].Chinese Opt.,2011,4(4) :213-232.( in Chinese)
[4] 杨志卿,张清源. DPL 固体激光成像雷达系统研究[J]. 红外与激光工程,2006,10(35) :300-303.YANG ZH Q,ZHANG Q Y. Study of DPL solid-state laser image radar system[J].Infrared and Laser Eng.,2006,10(35) :300-303.( in Chinese)
[5] 丛海兵,宁永强,张星,等.高功率980 nm 垂直腔面发射激光器的亮度特性[J].中国光学与应用光学,2009,2(6) :557-560.CONG H B,NING Y Q,ZHANG X,et al.. Brightness characteristics of 980 nm high power VCSEL[J].Chinese J. Opt.Appl. Opt.,2009,2(6) :557-560.( in Chinese)
[6] 杨志卿,吴登喜,郑永超.二维光学扫描中扫描角度非线性研究激光技术[J].激光技术,2004,3(28) :262-265.YANG ZH Q,WU D X,ZHENG Y CH. Study of angular non-linearity in 2-D optical scanning[J].Laser Technology,2004,3(28) :262-265.( in Chinese)
[7] 谢冀江,高飞,潘其坤,等.基于光束扫描宽化技术的激光掩模微加工系统[J].中国光学,2011,4(6) :654-659.XIE J J,GAO F,PAN Q K,et al.. Laser mask micromachining based on beam-scaning wideing tenique[J].Chinese Opt.,2011,4(6) :654-659.( in Chinese)
[8] 苏毅,万敏.高能激光系统[M].北京:国防工业出版社,2004.SU Y,WAN M.High Energy Laer System[M]. Beijing:National Defense Industry Press,2004. ( in Chinese)
