离轴三反测绘相机调焦机构的设计
2012-10-30邵明东孙继明
邵明东 ,郭 疆,孙继明
(中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
1 引 言
测绘相机在轨飞行时必须保证其主点、主距的变化在允许的范围内,否则会造成测绘精度的下降。测绘相机原则上不允许或无需进行在轨调焦,但相机在运载过程中会受到冲击、振动、过载等影响,在轨运行时也会受到温度、高度、大气压力等变化的影响,因此会产生离焦现象[1-6]。通常在地面试验( 如外景成像试验、热试验等) 需要进行调焦才能找到最佳像面,达到试验的目的,因此,为了保证相机的成像质量和研制过程的可实施性,须对测绘相机设计一套调焦机构,使相机具有调焦功能。
本文在分析常用的3 种调焦机构的基础上设计了适用于离轴三反测绘相机的调焦机构,计算了调焦机构的灵敏度,并对其进行了精度检测和实验验证。
2 调焦方式的选择
空间相机有3 种常用的调焦方式:镜组调焦、平面反射镜调焦和焦面调焦[7]。
(1) 镜组调焦: 借助于调整光焦度最小的反射镜位置来实现调焦。本光学系统的主镜、次镜、第三镜均为离轴非球面反射镜,三镜间光学间隔有严格的要求,调整其中任一个镜都会对像质产生较大影响,且光学系统的参数也会随之改变,因此不宜做调焦光学元件。
(2) 平面反射镜调焦: 在光路中加入一平面反射镜,用于折转光路使光学结构紧凑,通过调整反射镜的前后位置实现焦面位置调整。但是由于离轴三反光学系统有离轴角,在平面反射镜前后运动时,主光线会在像面上产生移动,即会导致主点位置的变化,其原理如图1 所示。主点位置的变化量:

式中:S为调焦量,α 为倾斜角。
本相机的倾斜角约为5°,一次调焦量一般为1/4 半焦深,即S=F2λ,根据相机相对孔径1∶9,CCD 像元尺寸为7 μm,计算一次调焦量主点位移情况,得:
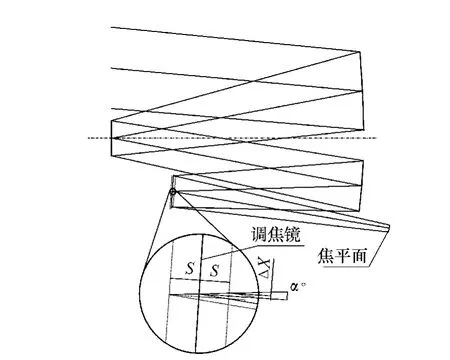
图1 平面反射镜调焦原理Fig.1 Schematic diagram of focusing by plane mirror

在一次调焦后,主点位移量为1.26 pixel,远大于测绘相机主点几何标定值0.2 pixel,无法满足测绘要求。因此,在测绘相机的设计过程中应充分考虑调焦机构位置对相机主点的影响。
另外,在做调焦运动时,调焦机构的直线运动误差也会导致主点位置的偏移,当折叠镜距焦平面距离为1 300 mm,调焦机构直线度为2( ″) /mm,( 假设直线度线性变化) 全调焦行程为0.1 mm 时,计算主点偏移量:

调焦机构的直线度误差对相机主点位置的影响较小,虽然可以满足要求,但不是很理想。因此,通过平面反射镜对离轴三反测绘相机进行调焦也是不可取的。
(3) 焦面调焦: 通过调整焦平面位置来实现像面位置的校正。只要调焦机构沿主光线运动即可避免调焦对主点位置的影响。
综上,为使相机总体结构更加合理、调整方便,本文采用焦面调焦来实现相机的调焦功能。
3 调焦机构的要求
测绘相机调焦机构的精度对相机能否找到最佳像面,相机主点位置的稳定性以及测绘精度有着重要影响,因此,以上方面对调焦机构的设计精度提出了具体的要求。
(1) 清晰成像对调焦精度的要求[8]
根 据 计 算 公 式 ± 2F2λ,求 得 半 焦 深 为±102 μm,调焦精度应≤±10 μm。考虑到由装调误差、温度引起反射镜曲率变化和光学零件轴向间隔误差引起的焦距变化量,相机光轴方向的调焦行程设计为±2 mm 即可满足调焦要求。
(2) 测绘精度对调焦精度的要求[8-9]
相机的焦距是影响测绘高程精度的主要因素,根据文献[9]给定的参数,可算出焦距误差对相对高程误差和绝对高程定位精度的影响,如图2和图3 所示。从图中可以看出,焦距误差对相对高程有较大的影响,对绝对高程定位精度影响权重更大,从而影响地面点的综合绝对定位精度。若相机焦距的标定精度要求≤±10 μm,则调焦机构的调焦精度应≤±3 μm。

图2 焦距误差对相对高程的影响Fig.2 Influence of focal length error on relative photogrammetric elevation
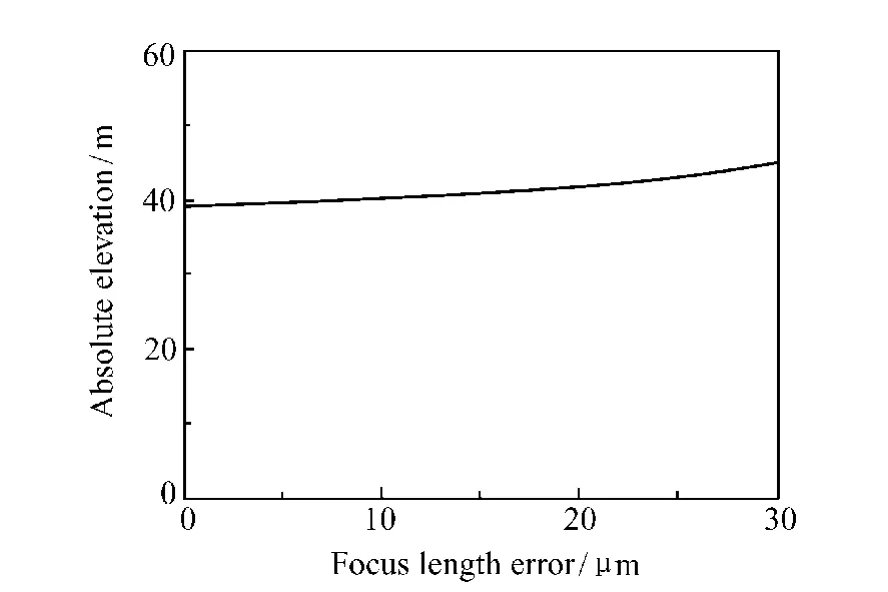
图3 焦距误差对绝对高程的影响Fig.3 Influence of focal length error on absolute photogrammetric elevation
(3) 主点位置稳定性对调焦系统的要求
由于该测绘相机的主点标定精度为±1.6 μm,设定调焦机构的行程为±2 mm,则在该调焦行程内要求调焦机构的直线度<2 μm。
4 调焦机构设计
4.1 结构设计
针对本相机的特点,将调焦机构设计为通过步进电机驱动两级齿轮副传动和一级蜗轮蜗杆副传动,从而带动端部装有绝对式光电轴角编码器的滚珠丝杠副,推动导轨上的滑动部件带动焦平面组件沿其法线方向前后运动。由于蜗轮蜗杆副具有自锁功能,故该结构具有自锁功能。在该结构中选用了具有较高直线度和平行度的导轨和丝杠,并在装配完成后对该结构进行一定时间的反复跑合试验,使相应的传动部件进行磨合,以保证在使用中机构运动的顺畅性和稳定性。调焦组件传动结构示意图和调焦机构结构图分别如图4 和图5 所示。
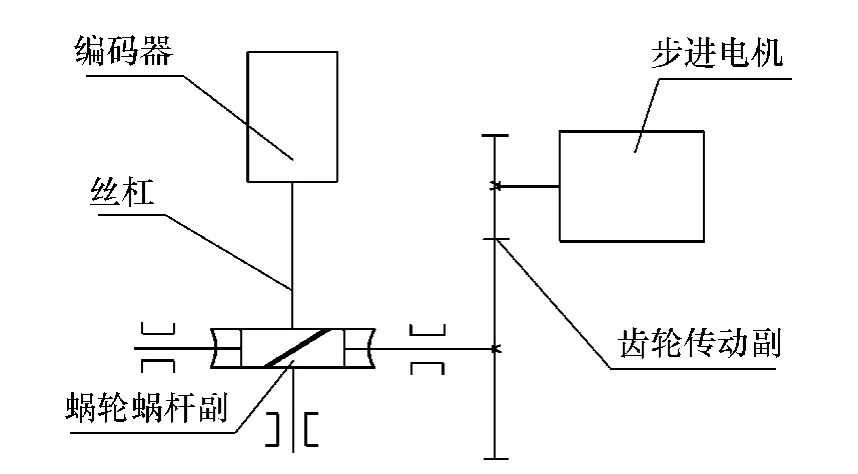
图4 调焦组件传动结构示意图Fig.4 Transmission structure diagram of focusing device

图5 调焦机构结构图Fig.5 Structure diagram of focusing mechanism
经分析计算得到,相机焦平面组件质量为8.6 kg,驱动的滑动部件质量为1.2 kg,驱动载荷按照10 kg 计算来选择步进电机。
4.2 调焦灵敏度
齿轮副和一级蜗轮蜗杆副总传动比i=62.5,步进电机步距角α=0.9°,滚珠丝杠导程s=5 mm则步进电机每走一个步距角,调焦机构的直线位移灵敏度为:
即步进电机每走一个步距角,像面移动0.2 μm。
5 试验验证
为检验调焦机构设计的合理性,检验其承受热真空环境的能力,对该调焦机构进行了力学环境试验和热真空试验。
(1) 力学环境试验
由于星载遥感器在运载过程会受到冲击、振动等力学环境的影响,需对遥感器整机进行力学环境模拟试验。对此调焦机构随同整机进行了X、Y、Z3 个方向的正弦振动试验和随机振动试验,并在调焦支架上表面安装加速度传感器。其中X轴为飞行方向,Z轴为对地方向,Y轴按右手定则确定。试验结果如表1 所示。
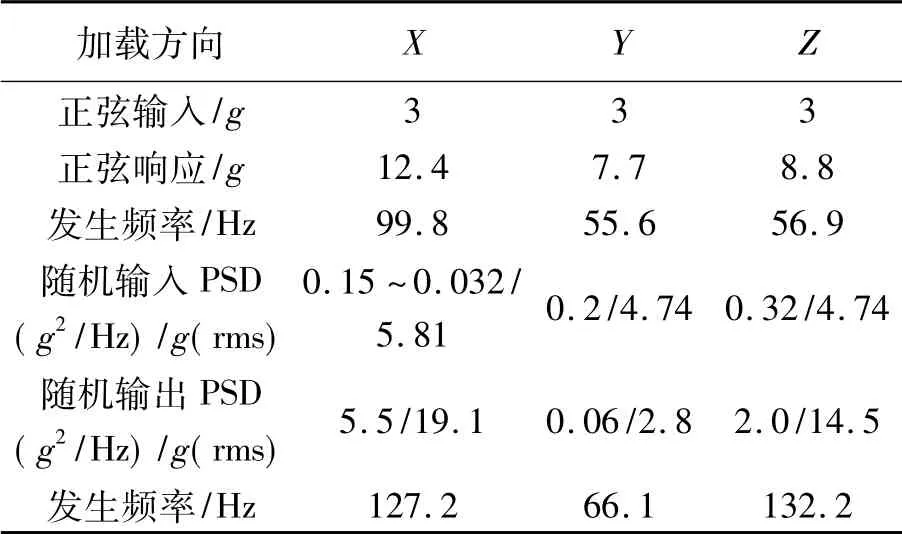
表1 3 个方向的正弦振动和随机振动响应Tab.1 Responses to sine vibration and random vibration in three directions
根据该星环境与可靠性通用技术条件,结构组件在力学环境试验中正弦振动的放大倍率<10,随机振动的放大倍率<5,表明该结构能够经受住该振动环境的考验。表1 的数据表明,该调焦机构具备经受该力学环境模拟试验的能力。
(2) 热真空试验
此调焦机构随整机一起进行了热真空试验,温度为13.5 ~22.5 ℃;压力≤1.3 ×10-3Pa,试验结果表明调焦机构工作正常,性能稳定。
6 调焦精度检测
6.1 调焦步距精度检测
在调焦机构滑动部件上粘贴平面反射镜,精调光电自准直仪,保证平面反射镜法线与其光轴重合,从而检测调焦机构的指向精度;用数字千分表打在滑动部件的一平面处,用于检测调焦镜移动量,如图6 所示。
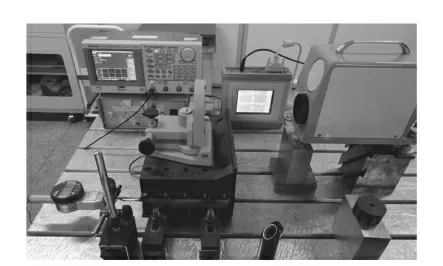
图6 精度检测图Fig.6 Test diagram of accuracy

图7 正向控制测试曲线Fig.7 Test curve of forward control
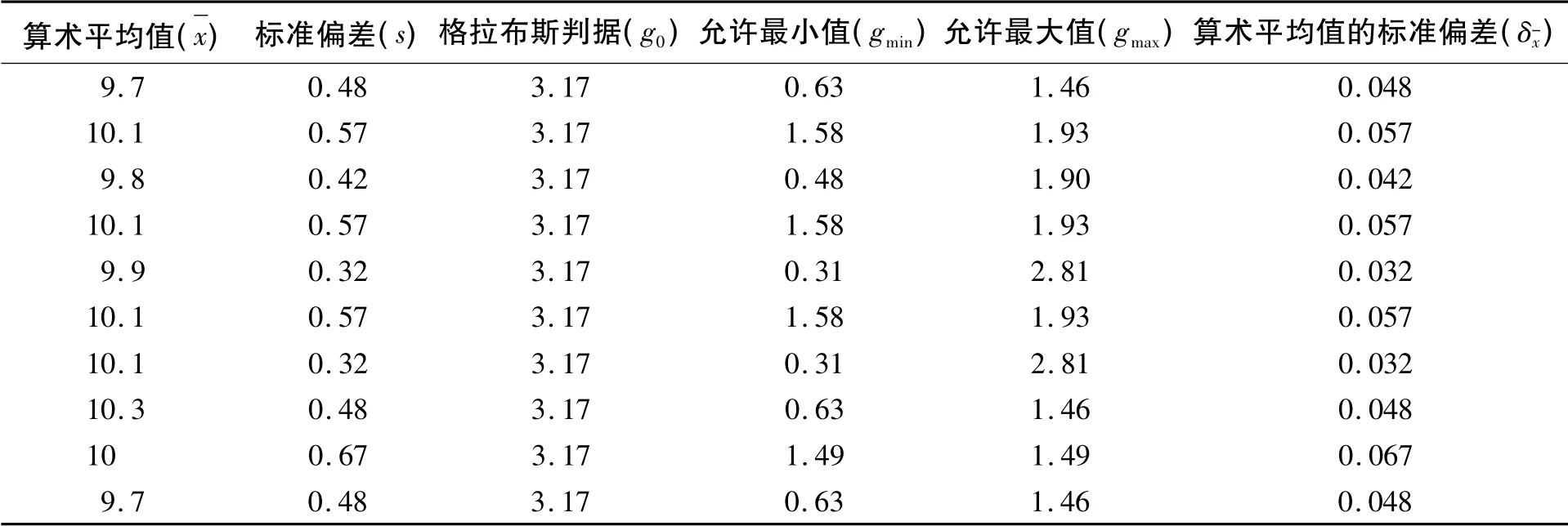
表2 正向控制检测数据分析Tab.2 Analysis of test data for forward control (μm)
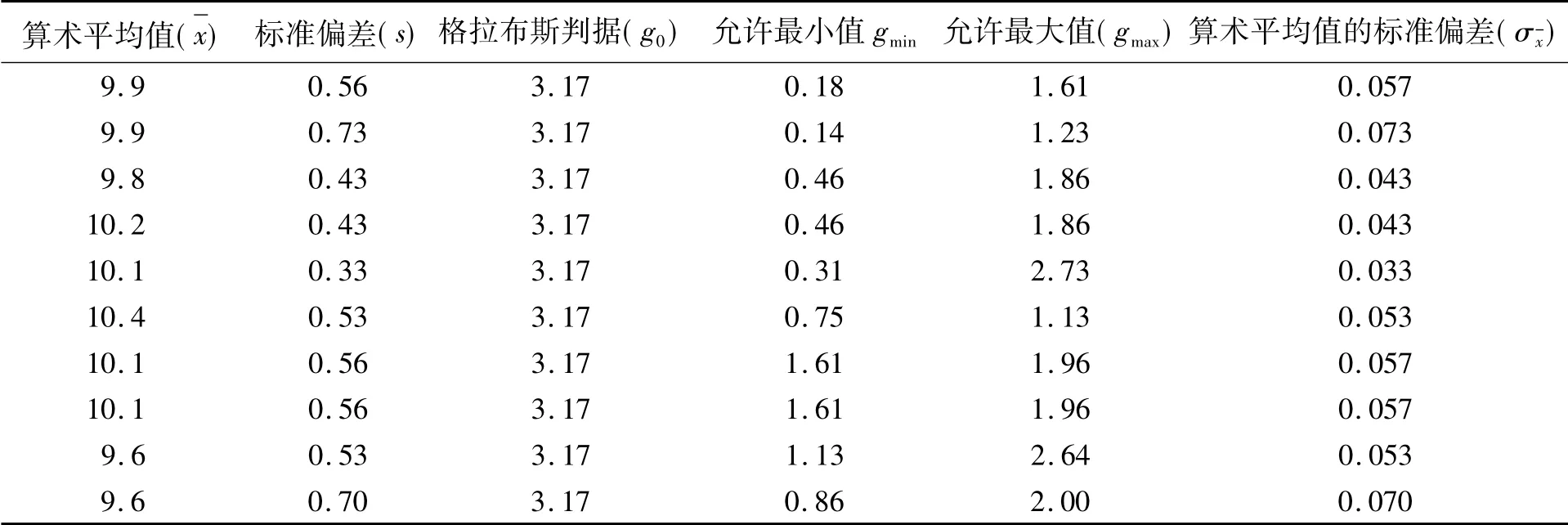
表3 反向控制检测数据分析Tab.3 Analysis of test data for backward control (μm)
按步进电机走50 步进行一次检测,对调焦步距设计行程进行检测。图7 为电机正转检测100次的数据,图8 为电机反转检测100 次的数据,表2 为10 组正转检测数据的分析值,表3 为10 组反转检测数据的分析值[10]。从结果可以看出,测试数据没有较大误差,调焦步距最大误差<3 μm,满足调焦精度要求。
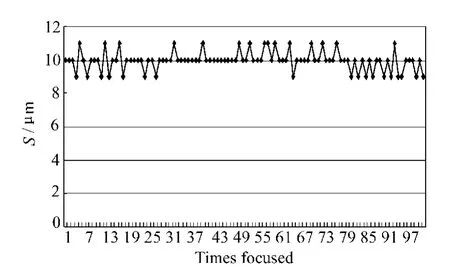
图8 反向控制测试曲线Fig.8 Test curve of backward control
6.2 调焦指向精度检测
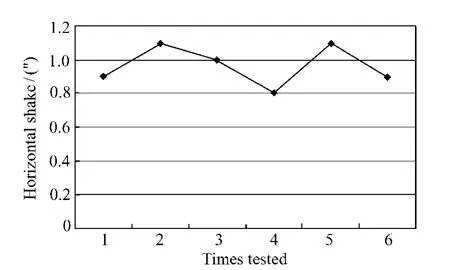
图9 水平晃动曲线Fig.9 Curve of horizontal shake
调焦机构的指向精度主要与导轨的精度有关,本结构选用了具有较高直线度和平行度的导轨,有利于提高机构的指向精度。用0.1″的自准直仪对其进行检测,如图6 所示。从图9、图10可以看出,在调焦行程范围内其水平晃动最大值为1.1″,垂直晃动最大值为0.8″。因此,只要在调焦机构安装时,将其运动方向与光轴方向保持一致,就能满足主点位置的偏移在其误差允许范围之内。
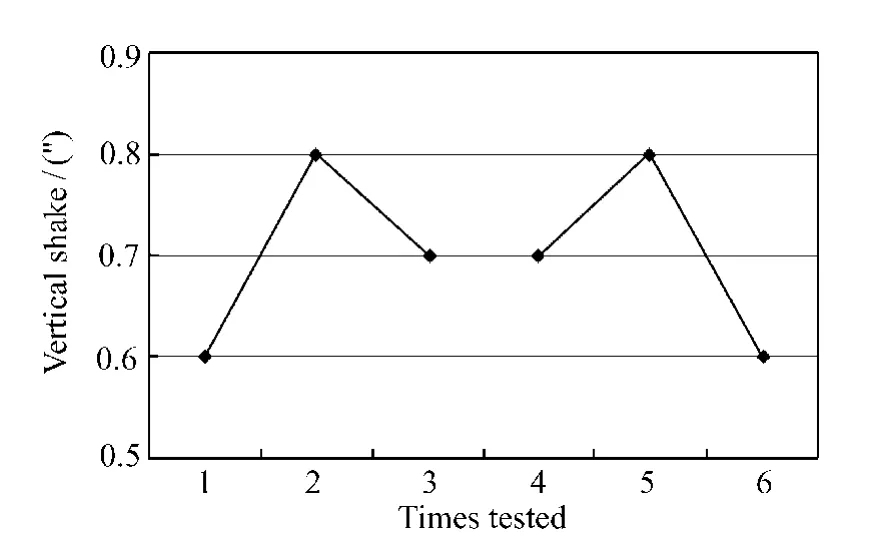
图10 垂直晃动曲线Fig.10 Curve of vertical shake
6 结 论
在详细分析了3 种调焦方式特点的基础上,确定了符合离轴三反测绘相机需要的调焦方式,设计了由涡轮蜗杆、滚珠丝杠和直线导轨配合传动的调焦机构;对该机构进行了精度检测和试验验证,结果表明: 该调焦机构指向精度<2″,定位精度<3 μm,具有结构紧凑、质量轻、承载能力大、位移精度好、运行平稳、可靠性高等特点,能够满足离轴三反空间相机调焦的要求。
[1] 丁亚林,田海英,王家琪.空间遥感相机调焦机构设计[J].光学 精密工程,2001,9(1) :36-38.DING Y L,TIAN H Y,WANG J Q .Design on the focusing mechanism of space remote-sensing camera[J].Opt. Precision Eng.,2001,9(1) :36-38.( in Chinese)
[2] 张新洁,颜昌翔,谢涛.星载光学遥感器调焦机构的设计[J].光学 精密工程,2009,17(11) :2757-2761.ZHANG X J,YANG CH X,XIE T. Design of focusing mechanism of space remote sensor[J].Opt. Precision Eng.,2009,17(11) :2757-2761.( in Chinese)
[3] 胡君,王栋,孙天宇.现代航天光学成像遥感器的应用与发展[J].中国光学与应用光学,2010,3(6) :520-526.HU J,WANG D,SUN T Y. Application and development of recent space optical imaging remote sensors[J].Chinese J.Opt. Appl. Opt.,2010,3(5) :520-526.( in Chinese)
[4] 卢锷,颜昌翔,吴清文,等.空间光学遥感器环境适应性设计与试验研究[J].中国光学与应用光学,2009,2(5) :365-370.LU E,YAN CH X,WU Q W,et al.. Research on adaptability of optical remote sensors in mechanical and space thermal environments[J].Chinese J. Opt. Appl. Opt.,2009,2(5) :365-370.( in Chinese)
[5] 张新洁,王树清,颜昌翔.空间相机调焦机构的设计与分析[J].中国光学与应用光学,2010,3(5) :462-465.ZHANG X J,WANG SH Q,YANG CH X. Design and analysis for focusing mechanism of space camera[J].Chinese J.Opt. Appl. Opt.,2010,3(5) :462-465.( in Chinese)
[6] 黄和平,夏寅辉,安成斌,等.大口径、长焦距红外系统调焦机构设计[J].激光与红外,2005,35(10) :745-747.HUANG H P,XIA Y H,AN CH B,et al.. Design on the focusing mechanism of long focus IR system[J].Laser&Infrared,2005,35(10) :745-747.( in Chinese)
[7] 安源,齐迎春.空间相机直线调焦机构的设计[J].光学 精密工程,2009,17(3) :609-614.AN Y,QI Y CH. Design of straight-line focusing mechanism for space camera[J].Opt. Precision Eng,2009,17( 3) :609-614.( in Chinese)
[8] 李朝晖,王智,乔克,等.三线阵立体测绘相机高精度调焦技术及实现[J]. 光电工程,2009,36(10) :41-46.LI ZH H,WANG ZH,QIAO K,et al.. Focusing technique for three-line stereo mapping camera and realization[J].Opto-Electronic Eng.,2009,36(10) :41-46.( in Chinese)
[9] 胡莘,曹喜滨.三线阵立体测绘卫星的测绘精度分析[J].哈尔滨工业大学学报,2008,40(5) :695-699.HU X,CAO X B. Analysis on precision of stereo mapping microsatellite using three-line array CCD images[J].J. HarbinInstitute Technology,2008,40(5) :695-699.( in Chinese)
[10] 费业泰.误差理论与数据处理[M].4 版.北京:机械工业出版社,2003.FEI Y T.Error Theroy and Data Processing[M].4th ed. Beijing:China Machine Press,2003.( in Chinese)