混凝土拱坝高精度平面三维监测网的建立及质量评价
2012-10-23李军安
李军安
(陕西省水利电力勘测设计研究院 西安 710002)
1 概述
西安市辋川河引水李家河水库工程拦河坝为碾压混凝土抛物线双曲拱坝,坝顶高程884m,最大坝高 98.5m,坝顶弧长 351.71m,水库正常蓄水位880.0m,水库总库容为5260万m3,调节库容为4400万m3。水库坝址处河谷深切呈“V”字型,河道狭窄,河床宽度仅15~30m。两岸山坡陡峻,荆棘丛生、植被茂密、通行及通视条件较差。
枢纽区平面监测三维控制网的建立是采用Leica TCA机载自动监测软件实施。该操作系统简单,测站完成各项设置后,仪器可自动照准各目标点,自动测距、测角,并实时自动检查各项误差,超限后自动处理。同时,该系统后处理完善、规范,与之相配套的后处理软件可以自动生成与规范标准方向观测记录手簿完全一致的报表等。
2 平面三维监测网等级的选取
依据 DL/T5178—2003《混凝土坝安全监测技术规范》的规定,大坝安全监测设计报告中明确监测网最弱点位移量中误差 m位应小于±2.0mm。SL197—97《水利水电工程测量规范》将大坝平面监测三维网划归为专用平面控制网,根据精度要求和实际条件确定各级专用平面控制网适用范围,且明确重力坝、拱坝、支墩坝变形监测、近坝区危岩变形监测、稳定期地形变形监测等应选用专一级平面控制网。专一级网主要技术指标是最弱点点位中误差 m点。最弱点位移量中误差m位和点位中误差m点的关系为:m位=m点,即:混凝土大坝安全监测网的最弱点点位中误差m点应小于±1.41mm。在水利水电工程枢纽区布置监测网的网形条件受地形地貌限制,只有考虑选择控制网的观测等级。SL197—97中,专一级网的最弱点点位中误差±1.3mm,相当于位移量中误差±1.84mm,其精度标准与DL/T5178—2003基本相同。那么,李家河水库双曲混凝土拱坝平面监测三维控制网的等级及观测技术要求执行SL197—97中专一级网的规定,可以满足监测网最弱点位移量中误差m位小于±2.0mm。
3 大坝平面监测三维网精度估算
根据现场地形及监测对象,聘请设计及地质人员实地进行具体的点位选设,确定大坝平面监测网由基准点和工作基点组成监测控制网,网形如图1所示。
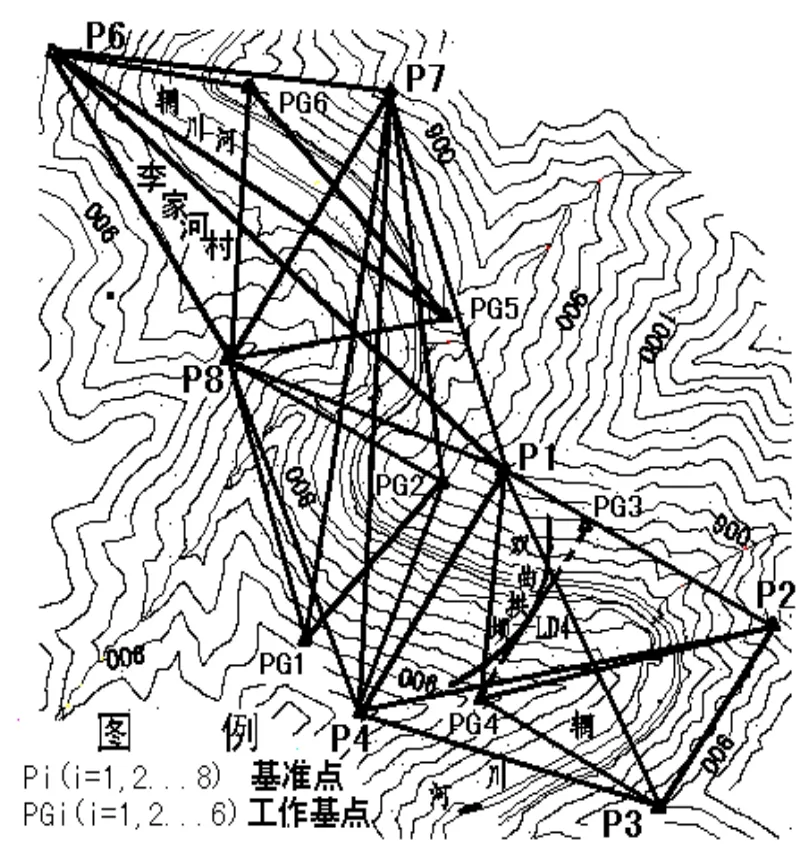
图1 大坝平面监测三维控制网索引图
大坝平面监测网形选定后,基准点采用实地测取概略坐标,工作基点从1∶2000地形图上量取概略坐标。精度估算参数选取:测角中误差mβ取0.5″,测距中误差ms取1mm+1ppm·Dkm。采用清华山维《工程测量控制网微机平差系统》软件,在微机上按边角全测网进行了精度估算,计算出基准网点位精度、可靠性、灵敏度指标。其中,网中最弱点点位中误差为±1.10mm,最弱边相对精度为1/478700,内可靠性R最大值6.63,外可靠性R′最大值6.09。
从估算各项指标结果看,监测三维网采用专一级(mβ=0.5″)时,其最弱点点位中误差m点完全可以达到±1.41mm的精度要求。
4 点位选取及标志的建造
网中各点均选在基岩或土质坚硬,便于保存的地方。其中:基准点为P1、P2、P3、P4、P6、P7、P8等 7个点,基准点均布置在施工影响范围之外;工作基点为PG1、PG2、PG3、PG4、PG5、PG6等6个点,分别用以监测坝肩高边坡、电站厂房背坡及坝顶的水平位移。由于大坝主体正在浇筑中,采用视准轴线法监测拱冠点LD4的右岸工作基点PG3待后设立。
基准点、工作基点均建造钢筋混凝土观测墩,观测墩的地面以下部分埋设至新鲜基岩上或半风化岩层150cm以下。在观测墩顶面埋设F-1A强制对中基座,基座调整倾斜度小于4′。
5 大坝平面监测三维网外业观测
采用测量机器人(Leica TCA2003全站仪配套TCA机载自动监测软件)实现了自动观测。外业观测技术要求及作业限差按照 SL197—97专一级平面控制网执行,即:
(1)水平角(采用方向观测法)、垂直角及斜距均观测15个测回。由于照准标志数量所限,部分测站水平角进行了分组观测,分组观测包括2个共同方向(其中 1个为共同零方向),其两组观测角之差如表1所示。其值均小于测角中误差的2倍(2mβ=±1.0″),按等权分组观测进行了测站平差。

表1 分组观测角度之差统计表
(2)采用专用量高游标卡尺在测站、镜站从三个方向分别量取仪器和棱镜高度,并取平均值作为仪器高和觇标高。量取高度读数至0.02mm。
(3)测站、镜站分别在观测开始、中间、结束时进行了温度、气压的测定,取均值,并按检定证书的修正值进行改正。
(4)斜距读数的中数经仪器加乘常数、气象后改正后,分别采用往返测垂直角计算测边高差中数,再利用斜距和高差计算测边水平距离。
全网测距边28条,最大边长819.003m,最短边长 276.962m,平均边长 441.482m。外业观测期间温度 7.0~27.4℃,网中 28条测距边垂直角<5°有18个,5~10°有7个,>10°有3个,且测距边垂直角最大为17°19′。
6 外业观测数据验算
两次独立外业观测完成后,分别进行了水平角观测三角形闭合差、测角中误差和测距中误差的验算。水平角外业观测成果验算见表2。
全网测距边 28条,最大边长(P1-P6)818.993m,最短边长(PG1-PG2)276.969m。根据往返测距较差分别计算得:第1次观测的平均测距中误差为1.06mm;第2次观测的平均测距中误差为 1.05mm,其值均小于规范规定的±2.5mm的要求。
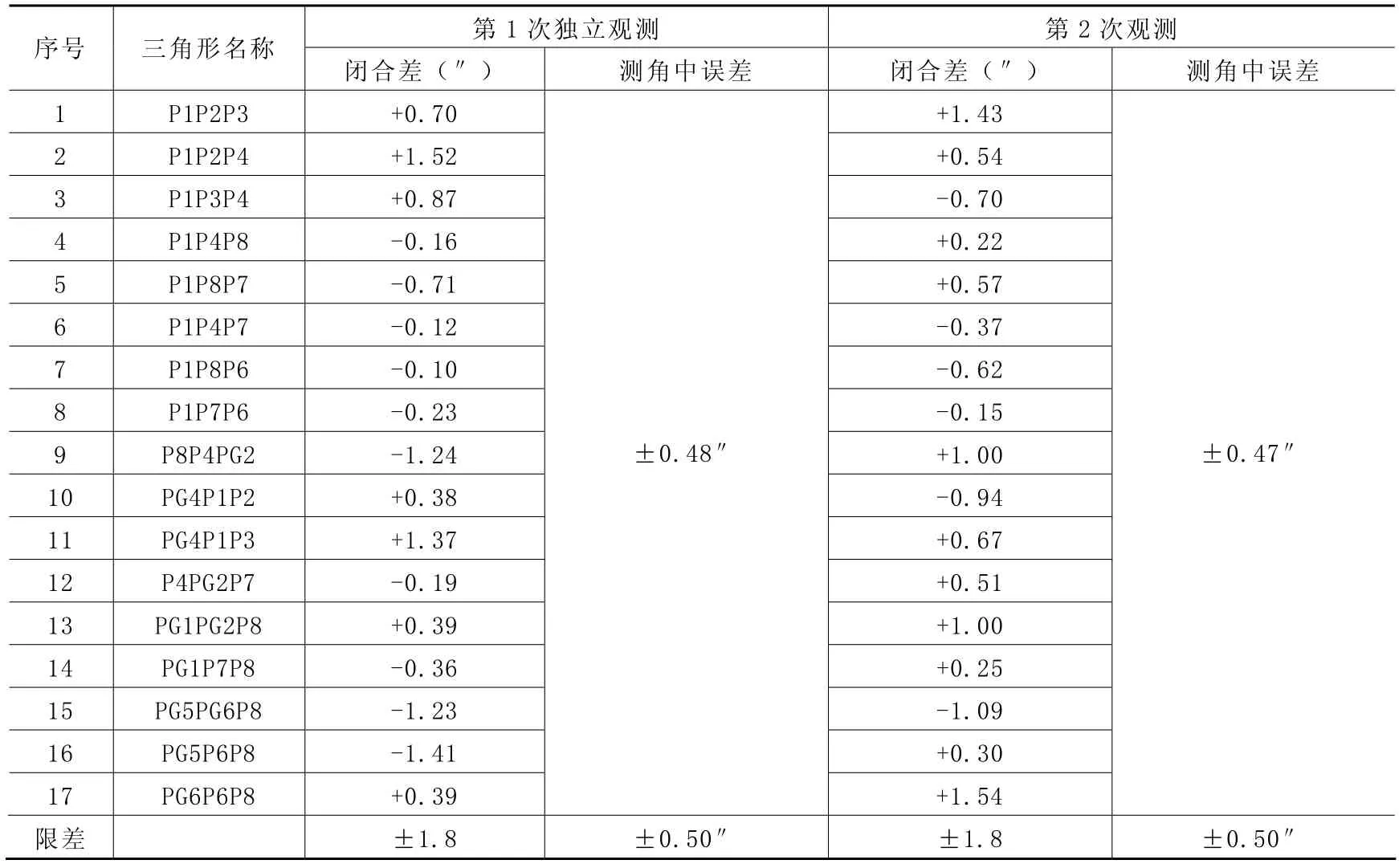
表2 三角形闭合差及测角中误差统计表
外业观测数据验算合格后,采用清华山维《工程测量控制网微机平差系统》软件,以P1为三维网的坐标和高程起算点(P1-P4边做为起算方位边),边长投影至840m高程面,按固定一点一方位的平面独立网进行数据处理。首期2次独立观测数据处理后精度统计见表3。

表3 首期2次独立观测成果精度统计表
7 数据处理及精度统计
从表3精度指标统计结果可以看出,对大坝平面监测三维网首期 2次独立观测成果进行比较,其较差均小于2m,达到设计书预期精度指标要求。取首期2次独立观测成果的均值作为大坝平面监测三维网的基准值。
8 几个问题的分析探讨
8.1 外业观测记录数据分析
(1)通过对外业观测数据返工的测站观测数据分析发现:在一个测站内,观测时间段测量机器人应同时进行方向观测、测距、天顶距观测各 15个测回,如果仪器自动重测的测回数超过1/3时,虽然重测后的 15个测回间测回差在限差内,但其观测数据在参与外业三角形闭合差验算时,会引起三角形闭合差超限。
(2)在外业观测过程中,如遇到天气由晴转多云,光线强弱产生突变时,测量机器人重测测回数会超过1/3。这种情况观测质量同样较差。
(3)观测方向的垂直角较大时,应选择在阴天或夜间观测,观测质量较好。
8.2 两次独立观测的方向值及测距差值评价
8.2.1 观测方向值的比较
水平角方向观测法独立进行2次观测,其较差应小于⊿=±2,mβ=±1.0″。经对 12个测站44个观测方向值(每测站不含零方向)2次观测方向值统计对比,其较差小于⊿的有22个,占总方向数的50%;较差在~1⊿之间的有15个,占总方向数的34.1%;较差大于⊿=±1.0″的有 7个,且最大值为-1.94″,占总方向数的15.9%。
现行规范只要求首期 2次独立观测成果做明确规定,而未对2次独立观测水平角的较差作出规定。
8.2.2 观测距离值的比较
平面三维监测网测距边 28条,经对首期 2次独立观测水平距离较差统计,往返测距较差正负值各占 50%,且仅有 1条边(P1-PG4边长294.25212mm)往返测距较差为2.23mm,其它均小于1mm+1ppm。
8.3 水平角观测测回数对成果质量的影响分析
笔者另行按水平角观测 12个测回的均值,进行验算及数据处理结果如表4所示。

表4 12测回的验算及数据处理结果对比表
从表4可以看出,水平角方向观测法若采用12个测回,对于大坝平面监测网测角精度是不易达到±0.5″的要求,首期 2次独立观测坐标差值也不易达到预期精度指标。
8.4 高精度仪器检定加乘常数的误差问题
本次外业观测过程中,采用 TS30全站仪复测了基准网点 P1、P6、P8等 3个点之间边长。其中:TCA2003全站仪检定的加常数C= -1.31mm,乘常数R =-2.09mm/km;TS30全站仪检定的加常数C = 0.00mm,乘常数R = 0.00mm/km。将两台全站仪所测边长进行了比对,计算统计结果如表5所示。

表5 TCA2003与TS30测量边长比对表 单位:m
根据检测样本结果可以看出:TCA2003和TS30两台仪器不考虑仪器加、乘常数改正的话,测距较差很小。如果考虑仪器检定加、乘常数改正,就涉及仪器检定的误差问题。目前,国内哪一家法定检定单位具备高精度全站仪的检定技术能力,值得业界同行关注。
9 结论及建议
(1)通过以上质量分析评价,李家河水库工程混凝土拱坝高精度平面三维监测控制网的建立,严格掌控外业观测过程中的最佳气象环境,达到了预期理想的精度。
(2)测量机器人虽然实现了外业自动化观测,替代了人工观测,减少了人工观测人为误差因素影响,但测量机器人自动观测仍然会受外界作业环境影响。因此,在高精度变形监测网的外业观测过程中,应严格掌控最佳天气环境,尽可能在阴天或夜间进行观测。
(3)测量机器人完成一个测站的全部数据测量,一般需要 40~60min。观测时间段温度的变化会直接影响测距边的计算精度。因此,应在测前、测中、测后同时分别测记测站和镜站的温度、气压,再取中数,以取得准确的气象改正系数。
(4)为了保证斜距改平精度,采用经气象改正后的斜距与三角观测高差计算水平距离。三角观测高差精度除与斜距、垂直角观测精度有关外,仪器和棱镜高度的量取精度也直接影响高差计算精度。本工程专门加工游标卡尺在测站、镜站从三个方向分别量取仪器和棱镜高度,并取平均值作为仪器高和觇标高的方法,取得了满意的效果。
1 工程变形监测分析预报的理论与实践.(ISBN 978-7-5084-5993-6).北京:中国水利水电出版社.
2 SL197—97水利水电工程测量规范.北京:中国水利水电出版社.
