磁悬浮永磁直线电动机驱动系统电压空间矢量控制的研究*
2012-10-23蓝益鹏韩晓明
蓝益鹏 韩晓明
(沈阳工业大学电气工程学院,辽宁沈阳 110870)
现代制造技术正朝着高速化、精密化和模块化方向发展[1]。传统的进给系统主要是“旋转电动机+滚珠丝杠”作为驱动机构来实现数控机床的直线形式运动。直线驱动技术是采用直线电动机直接驱动工作台实现进给运动,设备进给传动链长度为零,即所谓的“直接驱动”和“零传动”[2-3]。因而,直线驱动技术在数控机床领域中得到了广泛的应用。
磁悬浮永磁直线同步电动机兼有永磁电动机和直线电动机的双重优点,特别是具有非接触、无摩擦、无磨损等特点,总体性能上具有较大优势。然而不同于直流旋转电动机可以分别控制励磁控制回路和转矩控制回路,这是因为励磁电流分量和推力电流分量的相互影响、相互作用,磁悬浮永磁直线同步电动机控制系统成为一个多变量、强耦合的非线性系统[4-5]。
电压空间矢量调制(SVPWM)已经成为一种较为完善的控制方法,它是把三相变频器的指令输出电压在复平面上合成为电压空间矢量,并通过不同的开关矢量组合去逼近指令电压空间矢量[6]。SVPWM技术相比于SPWM技术的突出优点是:其开关器件的开关次数可以减少,开关损耗减少了1/3[7],极大地提高了直流电压的利用率,同时更易于实现数字化。为此,提出了采用SVPWM的方法来控制磁悬浮永磁直线电动机驱动系统,以保证该系统具有良好的动态响应和调速性能。
1 电压空间矢量控制的原理
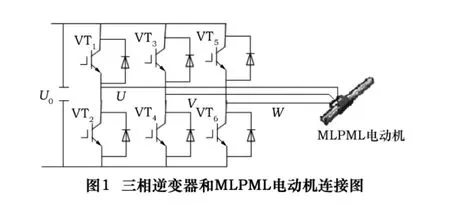
三相电压源型逆变器由6个功率开关器件组成,基本结构如图1所示。逆变器的上桥臂和下桥臂开关状态互补,因此可以用3个上桥臂的功率器件的开关状态来描述逆变器的工作状态,记功率器件开通状态为1,关断状态为0,A、B、C 三相状态分别用x,y,z表示,则上桥臂VT1、VT2、VT3的开关状态有8种组合,称它们为基本电压空间矢量[8]。
如图2所示为根据8个基本电压空间矢量的相位角特点分别将其命名为O000、U0、U60、U120、U180、U240、U300和O111的电压空间矢量图。其中O000和O111所对应的电压控制矢量幅值皆为零,故称它们为零电压矢量。其余电压矢量在空间均匀分布,它们幅值相等,皆为2UDC/3,相邻电压矢量间隔π/3,称其为工作电压矢量。

2 确定给定参考合成矢量Uout所在扇区
通常情况下,给定的是参考合成电压空间矢量在静止两相坐标系中的两个分量,将其投影到三相绕组轴线的法矢量上可得:
根据判断扇区编号的3个标量va、vb和vc的正负确定所在扇区的3个二进制编码A0、A1和A2的值:
如果va>0,则A0=1,否则A0=0;
如果vb>0,则A1=1,否则A1=0;
如果vc>0,则A2=1,否则A2=0。
再根据上述3个二进制编码A0、A1和A2的值,计算一个十进制扇区编号值P为

然后根据P值查表1,即可确定参考合成矢量Uout所在扇区。

表1 P值与扇区号的对应关系
3 确定相邻两工作电压矢量作用时间
引入3个通用变量X、Y和Z来计算时间T1和T2,具体公式如下:

通过式(3)变换到静止两相坐标系后,可求得各扇区相邻两工作电压矢量作用时间如表2所示。

表2 T1和T2赋值表
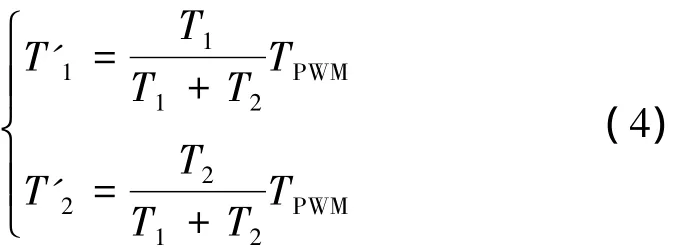
如果计算时间T1和T2出现饱和,那么有必要对其进行修正,修正公式如下:
4 确定电压空间矢量的作用顺序
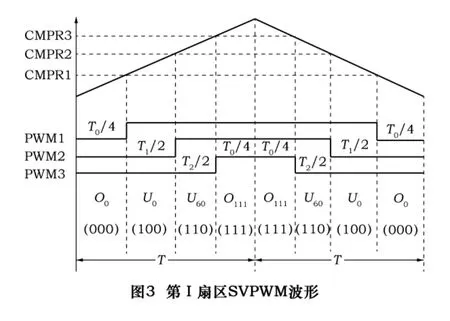
由于两个零电压矢量的存在,因此需要按照开关切换次数最少的原则确定电压空间矢量的作用顺序,其规律为:自开关状态函数全为0的零电压矢量u000开始,首先通过开关状态函数中只含有一个1的工作电压矢量(u001、u010或u100),再通过开关函数中含有两个1的工作电压矢量(u011、u110或u101),再通过开关状态函数全为1的零电压矢量u111,然后沿上述路径逆向控制开关,最后回到开关状态函数全为0的零电压矢量u000,如图3所示。
在确定完电压空间矢量作用顺序后,依据PWM脉冲宽度的大小分别将其记为T1on、T2on和T3on。假设两个零电压矢量的作用时间相等,则可有下述关系:

不同扇区内的工作电压矢量作用顺序不同,可由表3确定各扇区内三相PWM半周期脉冲的宽度。

表3 扇区编号与PWM半周期脉冲宽度对应关系
5 实验研究
磁悬浮永磁直线电动机及其驱动系统如图4所示。在该试验平台上对驱动系统的电压空间矢量控制方法进行了实验研究。
通过实验得到磁链的角度值和A相电压空间矢量波形如图5所示。在电动机稳定运行时其磁链的角度值为斜坡函数。A相电压空间矢量,以及B、C三相电压空间矢量波形如图6所示,为马鞍波,是由六段函数构成的一个分段函数。
图5~图6中可以看出,A、B、C三相电压空间矢量互差120°,为对称三相电压。
图7为反向运行时磁链角度值和A相电压矢量波形。

由于TMS320F2812 DSP为定点CPU,为了进行小数运算,图中的幅值为Q15格式。
6 结语
(1)针对磁悬浮永磁直线电动机具有直接驱动与磁悬浮的特点,为了保证该系统具有良好的动态响应,提出应用空间矢量脉宽调制(SVPWM)的方法来对其驱动系统进行控制。
(2)给出了判断参考矢量所在扇区和计算矢量作用时间的方法,以及按照开关切换次数最少的原则确定电压空间矢量的作用顺序。
(3)对磁悬浮永磁直线电动机驱动系统进行了实验研究,用 TMS320F2812 DSP完成 SVPWM控制算法,实现了对磁悬浮永磁直线电动机驱动系统的电压空间矢量控制。
[1]王先逵,陈定积,吴丹.机床进给系统用直线电动机综述[J].制造技术与机床,2001(8):18-21.
[2]宁建荣,夏加宽,沈丽.PMLSM直接驱动工作台的机电耦合有限元建模[J].沈阳工业大学学报,2011,33(6):618-622.
[3]孙宝玉,梁淑卿,宋文荣,等.直线驱动磁悬浮进给系统的研究[J].光学精密工程,2003,11(4):338-342.
[4]叶云岳.直线电动机原理与应用[M].北京:机械工业出版社,2000.
[5]田录林,张靠社,王德意,等.永磁导轨悬浮和导向磁力研究[J].中国电动机工程学报,2008,28(21):135-139.
[6]周卫平,吴正国,唐劲松,等.SVPWM的等效算法及SVPWM与SPWM 的本质联系[J].中国电动机工程学报,2006,26(2):133-137.
[7]李传海,李峰,曲继圣,等.空间矢量脉宽调制(SVPWM)技术特点及其优化方法[J].山东大学学报,2005,35(2):27-31.
[8]朱瑛,程明,花为,等.磁通切换永磁电动机的空间矢量脉宽调制控制[J].电动机与控制学报,2010,14(3):45-50.
