一种新型可倾转有翼微型涵道飞行器的气动特性实验研究
2012-10-21蔡红明昂海松张华靓段文博
蔡红明,昂海松,张华靓,段文博
(南京航空航天大学航空宇航学院,江苏 南京 210016)
0 引言
涵道飞行器相比同样直径的螺旋桨飞行器,在相同的功率消耗情况下,产生了较大的拉力。这主要由于涵道抑制了螺旋桨叶尖涡的形成,减少了尾流能量损失,且涵道唇口能产生较大比例的附加拉力。而且在涵道的保护下,提高了飞行器的安全性,并降低了螺旋桨的噪声。
近年来,在广阔的应用前景刺激之下,涵道飞行器已经成为一个国际性的研究热点。例如美国的Cypher,Helispy,GTSpy等,其中有的已经试飞成功,有的已经装备部队。国内也开展了涵道飞行器的探索研究,取得了一些进展。该类涵道飞行器可以悬停和垂直起降,并能利用涵道前倾产生的前向拉力实现直升机模式低速前飞。但是阻力随前飞速度而迅速增大,因而它们仅适用于着重悬停和低速飞行性能的场合。本文设计了一种能以飞机模式快速前飞的新型可倾转有翼微型涵道飞行器。
由于涵道飞行器各部件之间相互作用的复杂性,从理论上确定涵道飞行器的气动特性有相当难度,相关研究还很少且不完善。本文采用风洞实验 的方法研究了它在悬停、垂直飞行和前飞状态下的气动特性。
1 实验模型
以本文设计的某型微型涵道飞行器为研究对象,通过低雷诺数风洞实验,研究该微型涵道飞行器的空气动力特性。在整个实验过程中,都采用全尺寸模型。表1给出了该涵道飞行器的部分总体结构参数。

表1 微型涵道飞行器主要参数值Table 1 Principal design characteristics of ducted fan MAV
图1为本文设计的新型可倾转有翼微型飞行器。该涵道飞行器可由单人携带和操控,用于监视、侦察、救灾等场合。该飞行器由对转螺旋桨、涵道、尾翼、舵面、电机、导流片等部件组成。

图1 微型涵道飞行器Fig.1 Micro ducted fan aircraft
它有如下几个特点:
(1)螺旋桨和涵道之间的间隙为涵道内径的0.5%,既保证显著的涵道增升效应,又避免振动与制造误差等因素造成的碰撞。
(2)两个电机驱动两个对转的螺旋桨,相互抵消滚转力矩,减小舵面配平负担,增大舵面进一步改变飞行器状态的能力。
(3)涵道外壁上布置了两个机翼,以飞机模式快速前飞时能提供足够的升力,保证良好的前飞性能。
(4)好的低速性能要求有大的前缘半径和大的涵道扩张比,而好的高速性能则要求有小的前缘半径和小的涵道扩张比,涵道外形设计综合考虑了低速飞行和快速飞行的性能要求。
(5)涵道出口安装有方向舵和一对差动副翼,由于各舵面作用在螺旋桨尾流中,因而它们都有较高的气动效率。左右副翼同步运动来控制涵道飞行器纵向运动,起到升降舵的作用,涵道飞行器的横航向运动则由左右副翼的差动和方向舵来完成。
(6)该新型微型涵道飞行器不仅可以悬停,垂直起降和以直升机模式低速前飞,而且能以飞机模式快速前飞。
它在各个飞行模式下的工作机理为:
悬停和垂直飞行时,由于螺旋桨的抽吸作用,气流在涵道唇口处产生绕流形成低压区,产生涵道升力,又由于涵道抑制了螺旋桨叶尖涡的形成,因而涵道飞行器与螺旋桨飞行器相比,在相同螺旋桨直径和功率消耗的情况下,产生更大的拉力。
以直升机模式前飞时,前方来流在螺旋桨抽吸下转入涵道,由于涵道上风边唇口绕流强,产生的拉力大,而涵道下风边唇口绕流弱,产生的拉力小,因而产生了不利的俯仰力矩。前方来流在螺旋桨抽吸下转入涵道,其动量水平分量显著减小,由动量定理可知:涵道必然受到气流反作用动量阻力。该阻力比涵道迎风阻力大得多,由于该阻力作用中心通常高于涵道唇口,进一步加大了不利的气动力矩,且动量阻力和不利的气动力矩随前飞速度迅速增大。此时,可倾转涵道飞行器以减小动量阻力和不利的气动力矩。
以飞机模式前飞时,动量阻力和不利的气动力矩基本消失。螺旋桨受前飞来流的影响,拉力减小,当拉力和阻力平衡时,飞行器到达最高飞行速度。
由悬停转入飞机模式前飞过程中,涵道飞行器各部件气动力变化剧烈:倾转初期,涵道和螺旋桨提供前向拉力和升力,机翼不产生升力。倾转中期,飞行速度增大,螺旋桨、涵道和机翼共同提供升力,拉力由螺旋桨和涵道产生。转入飞机模式前飞后,飞行速度进一步增大,螺旋桨提供拉力,机翼和涵道提供升力。
2 实验风洞
微型涵道飞行器自身尺寸微小,飞行速度量级很低,研究对象雷诺数在5×104左右。吹风实验在南京航空航天大学空气动力研究所进行,实验中采用开口回流式低速风洞,涵道飞行器在开口段进行吹风,该实验段主要技术性能见表2。涵道飞行器在风洞中的安装情况如图2所示。
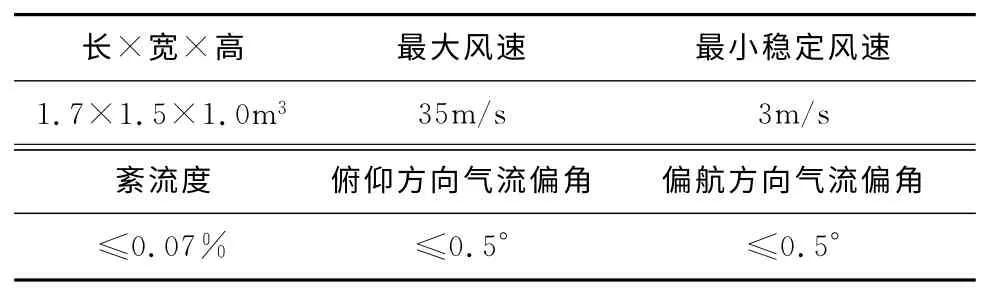
表2 低雷诺数实验风洞数据表Table 2 Wind tunnel data
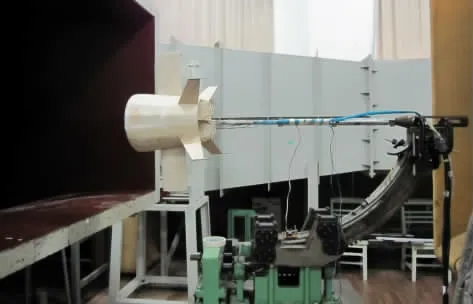
图2 本文设计的涵道飞行器在风洞中安装情况Fig.2 The ducted fan aircraft designed in wind tunnel
3 实验设备
由于微型涵道飞行器尺寸微小,飞行速度低,其风洞实验中所测气动力及气动力矩在量程、测量精度、准度上较常规风洞实验都有更高的要求。实验采用南京航空航天大学研制的杆式六分量内式天平(如图3所示)。该天平体积微小,可以精确测量MAV风洞实验中的微小量气动力与气动力矩。该天平各测量元的量程及精度、准度见表3。

图3 低雷诺数风洞实验中所用微型天平Fig.3 Micro balance in wind tunnel testing

表3 低雷诺数风洞实验测量天平参数Table 3 Balance parameters in wind tunnel testing
4 实验状态
与常规飞行器风洞实验不同的是,这次实验采用全尺寸模型,分别进行关电机、单电机和双电机3种模式实验,以全面研究设计参数对气动特性的影响。表4列出了相应的实验状态。

表4 实验状态Table 4 Test conditions
5 风洞实验结果与分析
图4(a)~图4(c)为风速分别为4m/s、10m/s和14m/s状态下,涵道飞行器在关电机模式时升阻力随迎角的变化曲线。文献[12]对展弦比分别为1/3、2/3、1、1.5和3的涵道进行了风洞实验,实验模型安装方法和本文相同,实验结果同样由六分量天平测得。本文设计的微型涵道飞行器的涵道的展弦比为1/2,介于1/3和2/3之间。由图4(a)与文献[12]中的图4比较可知,涵道飞行器升力趋势和文献[12]吻合,升力线斜率较低,经过40°迎角极大值后逐渐减小,未出现升力突降。由图4(a)与文献[12]中的图5比较可知,在60°迎角之前涵道飞行器阻力趋势和文献[12]吻合,但由于机翼的存在,涵道飞行器阻力经过60°迎角升力局部最大值后,仍维持在最大值附近。由图4可知,涵道飞行器在关电机模式下的失速特性较好,但升阻比特性很差。由于大前飞速度下的大迎角状态明显在微型涵道飞行器的飞行包线外,所以未纳入风洞实验状态。
图5(a)~图5(c)为风速分别为4m/s、10m/s和14m/s状态下,涵道飞行器在单电机模式时升阻力随迎角的变化曲线,设定螺旋桨转速为12500r/min。可以看出,最大升力不是产生在悬停状态,而是在70°迎角附近,这是由于涵道壁面提供的升力分量。升力曲线在最大升力点后并未出现突然跳跃,体现了良好的失速特性,这是由于涵道唇口提供的升力分量。阻力在最大升力点后继续增大,这是由于机翼提供的阻力分量。还可以发现,升阻力曲线变得平滑,产生这种现象的原因是由于螺旋桨吸流的作用。涵道飞行器的升阻比特性较关电机模式有较大提高,但显然仍不能满足涵道飞行器的设计要求。
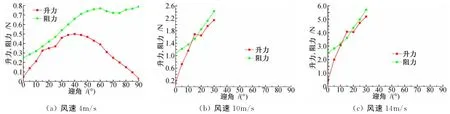
图4 升阻力在关电机模式下随迎角变化曲线Fig.4 Lift and drag trends as a function of angle of attack in power-off mode

图5 升阻力在单电机模式下随迎角变化曲线Fig.5 Lift and drag trends as a function of angle of attack in single-motor mode
图6为涵道飞行器在双电机模式下,升阻力在不同的螺旋桨转速下随轴向风速的变化曲线。可以发现在不同的螺旋桨转速下,涵道飞行器的升力随垂直上升的速度增大而减小,这是由于轴向来流减小了螺旋桨翼剖面迎角,从而减小了螺旋桨的升力。螺旋桨转速为15000r/min时,涵道飞行器的最大稳定垂直上升速度为7m/s左右。螺旋桨转速为12500r/min时,涵道飞行器可以保持悬停状态。

图6 升力在不同螺旋桨转速下随轴向风速的变化曲线Fig.6 Lift trends as a function of axial wind velocity at various fan speeds
图7(a)~图7(c)为风速分别为4m/s、10m/s和14m/s状态下,涵道飞行器在双电机模式时升阻力随迎角的变化曲线。由图7(a)可以发现,最大升力不是产生在悬停状态,而是在70°迎角附近,产生这种现象的原因是由于涵道壁面产生的升力分量。升力曲线在最大升力点后未出现突然跳跃,该涵道飞行器具有良好的失速特性,这是由于涵道唇口提供的升力分量。前飞速度增大时,涵道飞行器需要倾转更大的角度来保持稳定飞行。比如前飞速度为4m/s时,涵道飞行器需要倾转25°(迎角为65°)保持稳定飞行,前飞速度为10m/s时,涵道飞行器需要倾转70°(迎角为20°)保持稳定飞行。还可以发现,升阻力曲线变得更加平滑,产生这种现象的原因是由于双螺旋桨吸流的作用。
图8(a)~图8(c)为风速分别为4m/s、10m/s和14m/s状态下,涵道飞行器在双电机模式时俯仰力矩随迎角的变化曲线。可以发现,俯仰力矩随前飞速度增大而减小,这主要是由于大速度前飞时,配平迎角变小,涵道产生的动量阻力和力臂都变小,涵道两端唇口升力不均匀现象逐步消失。还可以发现,在每个前飞速度下,升降舵都有足够的操纵权限来配平,并有进一步改变涵道飞行器飞行状态的能力。飞行包线外的迎角未纳入实验状态。
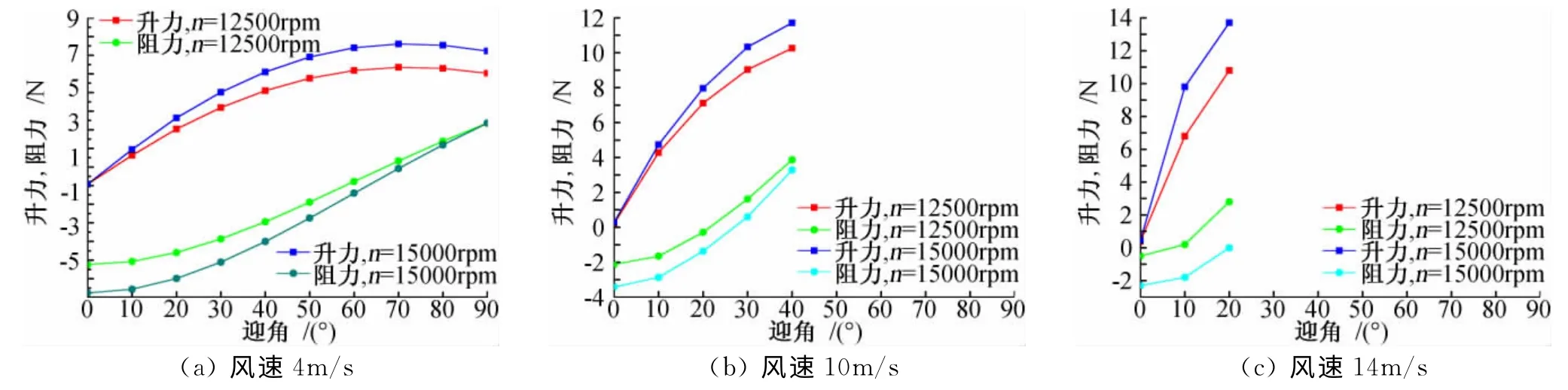
图7 升阻力在双电机模式下随迎角变化曲线Fig.7 Lift and drag trends as a function of angle of attack in twin-motors mode
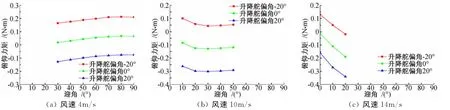
图8 俯仰力矩在双电机模式下随迎角变化曲线Fig.8 Pitch moment trends as a function of angle of attack in twin-motors mode
6 结论
本文设计了一种新型的可倾转有翼微型涵道飞行器,并采用风洞实验的方法研究了它的气动特性,得出如下结论:
(1)涵道飞行器总升力随垂直上升速度增大而减小,其中涵道升力随垂直上升速度增大而迅速减小。
(2)随着前飞速度增加,涵道飞行器需要倾转更大的角度来保持稳定飞行,俯仰力矩减小。
(3)在涵道飞行器的整个飞行包线中,舵面有足够的操纵权限来实现配平,并有进一步改变涵道飞行器飞行状态的能力。
(4)研究结果显示,本文设计的新型可倾转有翼微型涵道飞行器能完成从悬停到前飞的大包线飞行,并有较好的气动特性。
[1]MCGONIGLE K P,FERRARO J,CYCON J P.Unmanned VTOL ground surveillance:American,5575438[P].1994-5-9.
[2]MURPHY D W,BOTT J P,BRYAN W D,et al.MSSMP:no place to hide[A].Proceedings AUVSI[C].Baltimore,MD,1997:281-290.
[3]World wide web URL[EB/OL].http://www.helispy.com
[4]ERIC N J,MICHAEAL A T.Modeling,control,andflight testing of a small ducted-fan aircraft[J].Journal ofGuidance,Control,andDynamics,2006,29(4):769-779.
[5]李建波,高正,唐正飞,等.涵道风扇升力系统的升阻特性实验研究[J].南京航空航天大学学报,2004,36(2):164-168.
[6]ZHAO H W,CEES B.Aerodynamic design and analysis of a VTOL ducted-fan UAV[A].26th AIAA Applied Aerodynamics Conference[C].Honolulu,Hawaii,2008:18-21.
[7]YAGGY P F,GOODSON K.Aerodynamics of a tilting ducted fan configuration[R].NASA TN D-785,1961.
[8]MARTIN P,TUNG C.Performance and flowfield measurements on a 10-inch ducted rotor VTOL UAV[R].AHS,2004.
[9]WILL E G.Effects of duct lip shaping and various control devices on the hover and forward flight performance of ducted fan UAVs[D].Virginia:Virginia Polytechnic Institute and State University,2005.
[10]张德先,陈仁良.高速直升机涵道风扇矢量推进系统模型悬停状态的气动力测量研究[J].空气动力学学报,2009,27(3):281-287.
[11]ZIMMERMAN C H,HILL P R,KENNEDY T L.Preliminary experimental investigation of the flight of a person supported by ajet thrust device attached to his feet[R].NACA RM L52D10,1953.
[12]HREMAN S F.Experimental investigation of lift,drag,and pitching moment of five annular airfoils[R].NACA TN 4117,1957.