分布式互相关被动定位模型与实验
2012-10-20李宏伟岳剑平
李宏伟,尚 超,岳剑平
(91388部队,广东 湛江 524022)
0 引言
互相关被动测距或定位已是较成熟的传统技术,但通常局限于短基线阵[1]。一般认为,由于空间相关半径的限制,长基线分布式的互相关被动定位并不实用。本文的港内浅海(10~30 m非均匀水深)信道水声拉距实验表明,窄带信号的空间相关半径至少可达3 000~4 000 m。空间距离拉大后2个阵元的信号互相关,主要因浅海信道冲激响应各异,造成相关峰分裂而导致去相关现象,但实验情况要比仿真现象乐观。随着水声测量浮标技术的广泛应用,利用各测量阵元之间时延差的互相关定位具备了硬件基础,浮标携载DGPS接收机和无线电数传收发机,与工作母船基站实时交换数据,以便实现对目标辐射噪声进行被动定位。
1 被动互相关定位解算模型
互相关定位需要利用各测量阵元之间的时延差,基本原理是采用双曲面定位模型。下面讨论2种定位解算方法。
1.1 常规双曲面交汇定位模型
一般情况下,至少布放4个测量阵元,各个阵元坐标由DGPS测得。如图1所示,参考阵元0#不妨选取在坐标原点,将其接收信号作为母本信号,利用互相关运算提取其他阵元与参考阵元之间的信号时延差,又称时空关联。
图1 互相关定位的几何示意图Fig.1 Positioning geometry of cross-correlation
作为解算模型的输入,需要预先装订阵元水听器的吊放深度和比较粗略的目标深度估值。在极坐标表述情况下,首先利用3个阵元对目标T(r,θ)进行位置解算,根据几何关系有:

式中:1#和2#阵元与参考阵元的时延差分别用t1和t2表示,传播声速记作c。由此对目标位置进行估计:

式(2)一般情形有4个解,根据多解的位置换算各阵元时延差,检验与时延差实测值的一致性,通常可剔除2~3个假解。当引入第4个阵元的时延差实测值后,可确保剔除所有假解,获得惟一真解。
1.2 双曲面迭代搜索定位模型
参照文献[2],假设有N个测量阵元,以海面为基准,某个阵元的三维坐标记作(xi,yi,zi),其中选取i=0为参考阵元。目标的三维坐标记作(xs,ys,zs),根据几何关系建立目标函数式中:ti为各阵元与参考阵元的实测时延差;c为传播声速。依该式可得到N-1维目标函数向量。任意选取目标初始位置,若与目标真实位置(xs,ys,zs)完全相符,则目标函数向量为0向量。

依据设定的目标初始位置,按照如下迭代过程进行解算:
1)设置某一步长依次调整目标初始位置坐标,对目标函数向量进行一步预测,得出新的目标函数矩阵,若对于二维水平面定位,矩阵维数为2×(N-1);
2)计算目标函数矩阵的差分导数,并统计三角均方误差之和;
3)利用该均方误差之和,对原目标函数向量进行重构,得出迭代因子向量;
4)利用差分导数矩阵和迭代因子向量,对目标位置进行一步预测;
5)重复以上步骤,统计目标函数向量元素平方和,若小于某一设定门限值,则输出目标位置的真实解。
对于目标二维定位,这种解算方法的阵元数不得少于3个。实际测量的阵元数可以选取3个,比第1种定位方法少1个阵元,因此属于节省参数模型。一般经过10余步迭代搜索,即可完成目标位置解算。经过试算,该迭代搜索定位模型有比较稳健的收敛性。
2 浅海信道中的信号相关特性
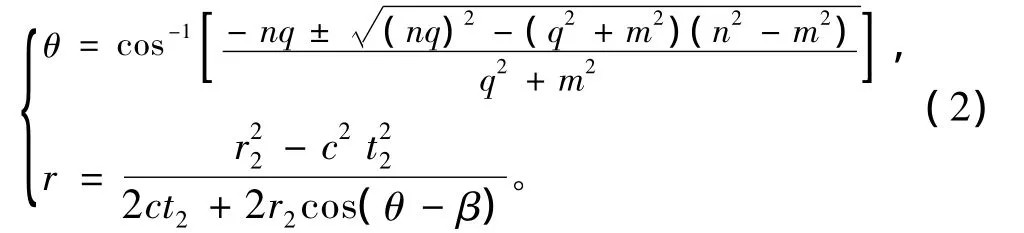
港内浅海条件下,选择窄带4.5~5.5 kHz、脉宽200 ms白噪声作为样本信号,利用拷贝相关器测试信号的空间相关半径。如图2所示,3 000 m和4 000 m处均获得稳定的拷贝相关输出,并且反映了实际的浅海多途时延结构。结果表明,窄带水声信号具有较大的空间相关半径。
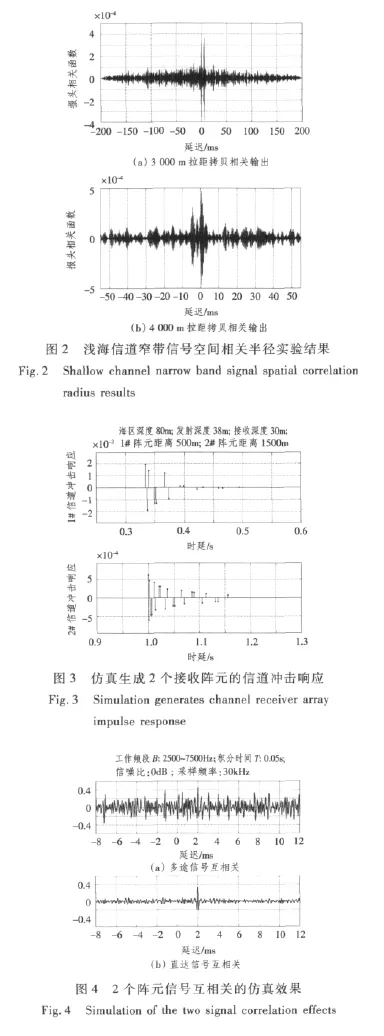
如果用2个阵元对同一噪声源信号进行互相关处理,并且接收阵元空间上分隔距离较大,那么由于阵元之间存在着不同的多途结构,而导致信号互相关出现相关峰分裂现象,给直达声相关峰识别带来困难。图3利用射线信道模型仿真了2个接收阵元的冲激响应,其中设置海水深度80 m,接收阵元深度30 m,噪声源深度38 m,水文条件为等声速梯度,噪声信号中心频率5 kHz。由于目标距离上的差异,造成了不同的信道时延结构。
接收信号的截取套以滑动时间窗,互相关仿真假定最大相关峰出现在2 ms处,对应着直达声时延差。如图4所示,由于2个阵元信道不再匹配,因此出现相关峰分裂,并造成直达声相关峰的能量损失。
实测情况较为乐观。港内实录信号采样频率20 kHz,按102.4 ms(2048点)积分时间进行互相关信号处理。图5表明,滑动时间窗时延差粗测值经搜索为-122.75 ms,精测值1.55 ms,归一化相关系数约0.68,判断受多途信道影响造成了部分相关损失,但直达声相关峰较为理想。
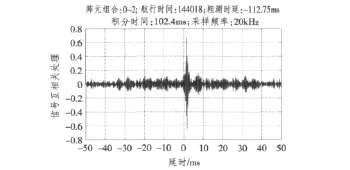
图5 2个阵元信号互相关的实测效果Fig.5 The measured cross-correlation results of two signals
3 目标机动与积分时间容限
强机动目标可能造成信号互相关的多普勒失配,因此只能选取较短的积分时间。参照文献[3](限于篇幅略去推导过程),对于理想带通型限带白噪声,其互相关积分时间容限满足不等式:

式中:f0为白噪声信号的中心频率;c为声传播速度;Δv为2个阵元相对于目标的径向运动速度的差值。当积分时间不满足该条件时,多普勒效应将导致互相关系数降低,称作相关失配损失。
式(4)用于确定多普勒匹配搜索的步长。图6是利用变采样的信号重构方法进行的仿真测试,以中心频率f0=5 kHz的情况为例,可获得与理论计算一致的结论。倘若选取T=500 ms,满足不等式的目标航速差值步长应不大于±0.3 kn;如果选取Ts=50 ms,则满足不等式的目标航速差值步长不大于±3 kn。以目标航速v=±40 kn为例,上述2种情况中按步长进行覆盖,多普勒匹配搜索的次数分别为133次和13次。
假设目标机动的角速度变化率分别取6°/s,10°/s和20°/s,当积分时间为0.5 s时,目标航向角变化分别为3°,5°和10°,以目标航速42 kn计算,相对阵元横向航速变化折算为2.20 kn,3.66 kn和7.29 kn,超出了多普勒容限,可能导致严重的相关损失。
表1列出了各种情况下的多普勒适配情况。当积分时间较长时,由于失配仅能对目标的直航段进行轨迹测量。强机动轨迹测量只能选取较短的积分时间。根据表1数据判断,测量系统能适配的条件下,互相关积分时间宜选取为50~100 ms之间。
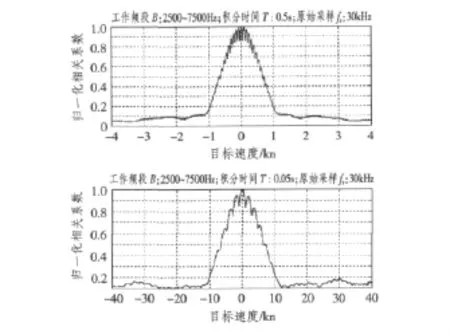
图6 利用信号重构对互相关多普勒容限进行测试Fig.6 Signal reconstruction using cross-correlation of Doppler tolerance of the test
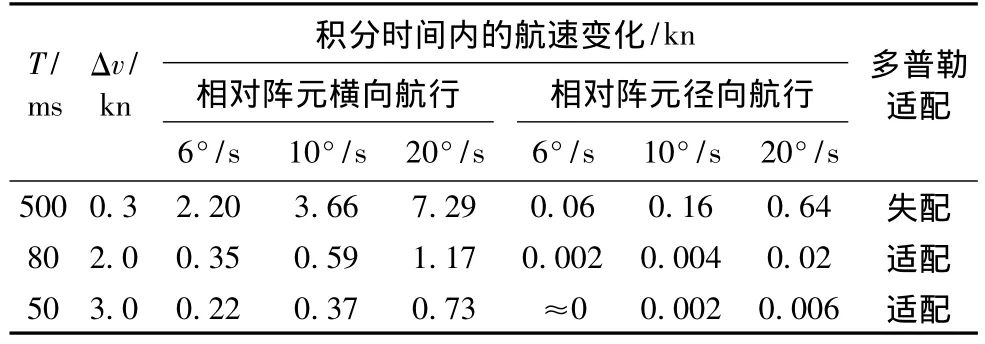
表1 目标机动对互相关适配的影响(目标航速42 kn)Tab.1 Effect of target maneuver on cross-correlation matching(target speed 42 kn)
4 港内浅海实验
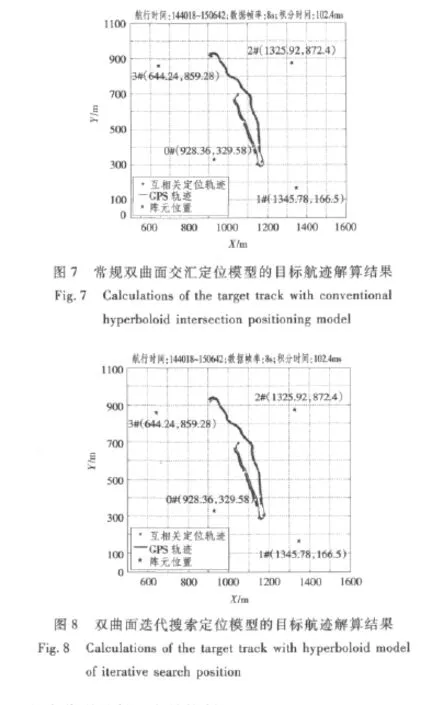
渔船拖曳目标声源低速航行,声源吊放深度约7 m,发射2~5 kHz白噪声,平均谱级约143.4 dB。4个阵元呈不等长四边形,基线约400~700 m,水深10~30 m,阵元吊放深度约8 m。全程测量装订各阵元坐标的初始时刻DGPS值,图7采用常规双曲面交汇定位模型进行解算,图8采用双曲面迭代搜索定位模型进行解算。以渔船DGPS航迹数据作为对比,结果表明2种定位模型的跟踪效果基本相当。
5 结语
分布式互相关被动定位技术以往研究较少,主要是因为信道相关半径和高速目标多普勒容限等问题容易受到置疑。本文的研究表明,利用长基线分布式阵元对目标噪声源进行被动跟踪,初步得到了浅海实验的支持。这是一种可以利用浮标技术进行海上测量的便捷方法,由于时延差估计精度较高,目标航迹的定位误差得以有效控制。
[1]周伟,惠俊英,等.三元阵被动测距浅海试验及后置处理[J].声学学报,2009,34(3):217 -222.ZHOU Wei,HUI Jun-ying,et al.Experiment of passive ranging for three-sensor array in shallow sea and post processing[J].Acta Acustica,2009,34(3):217 -222.
[2]于平,龚小林.一种提高水声定位精度的时空关联方法[J].靶场试验与管理,2009,(4):23 -27.YU Ping,GONG Xiao-lin.A method ofimproving underwater acoustic positioning precision by spatio-temporal correlation[J].Test and Management of the Range,2009,(4):23-27.
[3]朱华,黄辉宁,李永庆,梅文博.随机信号分析[M].北京:北京理工大学出版社,1990.227 -229.ZHU Hua,HUANG Hui-ning,LI Yong-qing,MEI Wen-bo.Random signal analysis[M].Beijing:Publishing of Beijing Institute of Technology,1990.227 -229.
