基于双天线GPS接收机航向姿态测量方法
2012-10-18郭万禄潘玉纯翟峥嵘
郭万禄,潘玉纯,翟峥嵘
(1.中国人民解放军92941部队,辽宁葫芦岛 125000;2.中国人民解放军91851部队,辽宁葫芦岛 125000)
0 引言
在新装备研制论证过程中,拟选用JAVAD公司的JNSGyro-4T四天线GPS测姿设备作为航向姿态(偏航、纵摇、横摇)测量设备,该设备内部含有4路GPS接收机,有较高的航向姿态测量精度,但购置经费昂贵。这里提出采用2套双天线GPS实现载体航向姿态测量,通过2套GPS双天线测姿系统分别测量得到2个基线在空间中的航向角和纵摇角。由1套GPS天线2个天线测姿系统输出的航向角和纵摇角,利用另一套GPS两天线构成的测姿系统输出值计算出横摇角。
问题提出后,在项目研制前对此专门进行了预研分析和实验验证,实验验证了采用此方法可以完成载体的航向姿态测量,结果能够满足该型测量装备对载体姿态实时测量的要求,节省了大量经费。
1 航向姿态测量方法
通常采用几种姿态探测器及其相应的数据处理方法确定目标或载体相对于某个基准确定航向姿态。其航向姿态确定的精度取决于数据处理方法与姿态探测器所能达到的精度。
1.1 惯性导航(INS)方法
惯性导航测量利用惯性敏感元件测量载体相对惯性空间的运动参数,根据初始条件计算出目标的姿态、方位、速度和位置参数,从而完成航向姿态的测量任务。INS是一个自主式的空间基准保持系统,惯性测量装置包括3个加速度计和3个陀螺仪,前者用来测量运载器的3个平移运动的加速度;后者用来测量运载器的3个转动运动的角位移。对测出的加速度进行2次积分,可解算出运载器在所选择的导航参考坐标系的位置。
1.2 GPS航向姿态测量方法
GPS测姿是在一个运动载体的几个不同位置上分别安装GPS接收天线,利用GPS载波相位测量求解出运动载体的三维姿态参数。GPS测姿平台的平面只能由3点或2个非重叠或平行的矢量来确定,因此最少需要在运动载体上安装3根GPS信号接收天线,这样才能形成2条独立的基线来实施GPS姿态测量。
1.2.1 两天线测姿
使用2根GPS天线进行运动载体的姿态测定,只能估计出2个姿态角。GPS天线在载体坐标系中的配用示意图如图1所示。
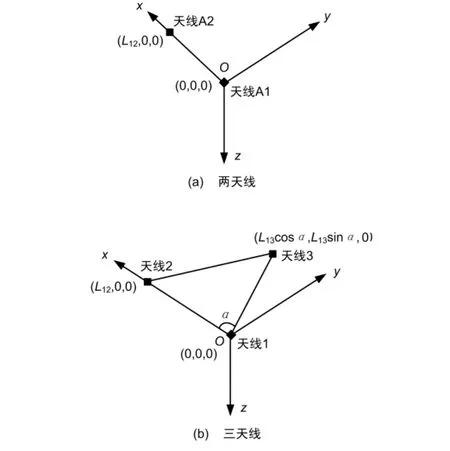
图1 GPS天线在载体坐标系中的配用
如图1(a)所示,L12为A1,A2基线的长度。天线A1到天线A2的矢量方向可以确定偏航角,天线A1的坐标为(L12,0,0)T,将天线设置为载体坐标系和当地水平坐标系的原点,而不必利用姿态参数矩阵,可以采用直接计算法来计算偏航角和俯仰角:
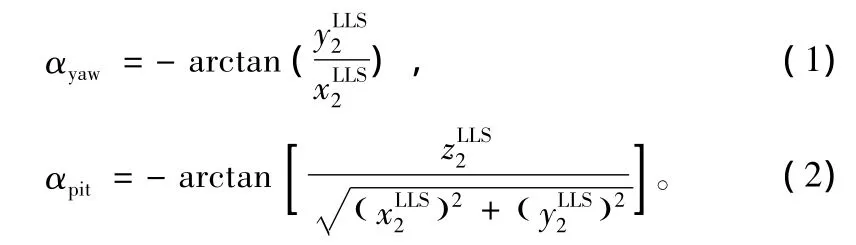
通过对GPS载波相位的观测,能够极其精确地测定天线A2相对天线A1在WGS-84地心系坐标的三维位置,再将其变换成以天线A1为原点的当地坐标系的坐标,然后就可以由式(1)和式(2)解算出偏航角和俯仰角。
1.2.2 多天线测姿
采用3根天线时,组成2条独立的基线,其中基线12用于测定偏航角和俯仰角,基线13用于测定横滚角,天线1、2、3在XOY平面内,且知基线12和基线13的夹角为α,可以精确测定。用前述两天线测姿的公式可以确定偏航角和俯仰角。通过求出天线3的水平坐标系到载体坐标系转换矩阵,从而得到横滚角,如图1(b)所示。
2 可行性分析
2.1 必要性
某型测量设备,采用DMU惯性导航类装置测量载体航向姿态,在试验准备过程中,需要对DMU航向姿态测量装置进行海上消磁作业,以消除设备所处载体铁磁物质环境对DMU测量结果的影响。海上消磁作业时,该设备安装固定在载体上,拖船以最小半径拖带载体旋转,有效测量数据不小于2圈,操作过程复杂,人员至少需要进行2次靠帮作业,尤其当海况条件恶劣时,容易出现断缆现象,载体容易失控,存在较大安全隐患。因此,在建设此类新型测量装备时,采用GPS测量载体航向姿态参数,避免海上消磁和跳帮等危险作业十分必要。
2.2 可行性
根据GPS多天线测姿原理方法,采用四天线测姿,4根天线配置成正方形,利用基线平面布局的特殊性,解算出几个姿态矩阵元素,进而解算姿态角,不需要知道初始姿态,从理论上是可行的。选用2套双天线GPS接收机,通过对2个天线接收到的GPS信号进行处理获得以2个天线连线为基准的航向和俯仰角度,同时为了得到载体航向、俯仰和横滚三维角度,将2套GPS接收机天线交叉放置,通过标校得到各天线的位置及输出角度值,即可获得GPS输出角度与载体航向姿态间的转换关系,根据姿态测量原理进行综合处理,得到满足要求的航向、俯仰/横滚测角精度,并且研制经费会大幅下降。
3 验证实验
3.1 基本情况
实验设备:Vector GPS航向测姿设备2套,设备支架1个,Leica TCA1201全站仪1套,笔记本电脑1台。GPS四个天线呈正方形布设如图2所示。
实验过程:首先将2套Vector GPS航向测姿设备固联在设备支架上,2套GPS天线的基线长均为50 cm,且它们之间相互正交。将全站仪调平,建立一个全站仪铅垂体系,测量GPS航向测姿设备4个天线在其中的坐标;同时,利用笔记本电脑通过串口获取GPS航向测姿设备的姿态测量结果输出。通过对不同航向姿态情况下获取的数据进行事后分析处理,验证GPS航向测姿设备的航向和倾角测量精度。根据GPS航向测姿固联坐标系的定义,由GPS天线主1和GPS天线从1构成测姿系统的输出即为GPS航向测姿系统输出的航向角和纵摇角,利用GPS天线主2和GPS天线从2构成的系统输出值计算出横摇角。
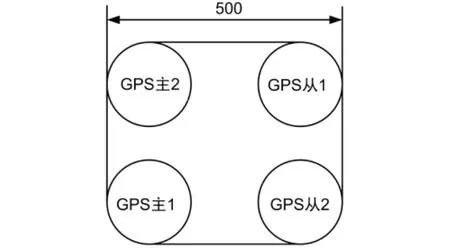
图2 GPS四个天线布设支架结构
3.2 原理
利用全站仪测量得到全站仪铅垂坐标系下GPS航向测姿系统4个GPS天线的坐标,利用这些坐标值可计算得到GPS航向测姿系统倾角输出,即可得到其倾角测量精度。
将设备支架的航向姿态进行调整,利用全站仪测量得到全站仪铅垂坐标系下调整后的4个GPS天线后的坐标值。通过计算获得GPS天线在航向姿态调整后航向的变化真值,与利用2次GPS航向测姿系统输出计算的航向差值进行比较,从而评定其航向角的测量精度。
假设设备在第1组情况下输出的航向和倾角分别为α1、β1,对应的全站仪此时测量得到的GPS坐标分别为:GPS主1=[X主1Y主1Z主1]和 GPS从1=[X从1Y从1Z从1];设备在第 2 组情况下输出的航向和倾角分别为α2、β2、对应的全站仪此时测量得到的GPS天线坐标分别为 GPS主2=[X主2Y主2Z主2]和 GPS从1=[X从2Y从2Z从2]。由此可计算得到在2种姿态情况下的方位角变化量真值为:

而利用GPS航向测姿设备输出的方位角计算可得到其方位角变化量为:ΔαGPS=α2-α1。则GPS航向测姿设备的方位角测量误差为:Δα=ΔαGPSΔα全。与方位角类似,可计算得到俯仰角真值为:则GPS航向测姿设备的俯仰角测量误差为:Δβ=β1- β全。

3.3 实验数据处理结果
在实验中,每次测量后,对设备的航向姿态进行调整,共进行了8次航向姿态测量,得到8组全站仪铅垂坐标系下的GPS天线坐标和相应的实验组号对应的GPS输出测姿结果。利用8组测姿文件可计算出每组的方位和俯仰角均值。全站仪测量得到的全站仪铅垂坐标系下的GPS天线坐标第1组和第5组数据如表1所示。
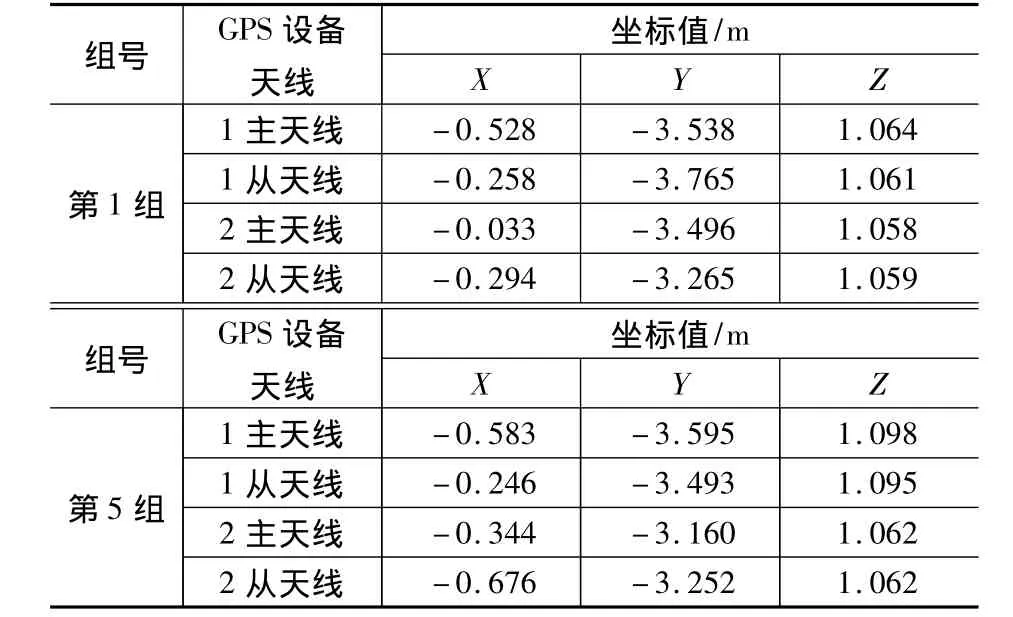
表1 全站仪测量得到的GPS天线位置
图3给出了8组实验2套设备中1套设备中的1组输出的方位和俯仰数据二维图,其中实线是实时采样数据,虚线是采样时间内采样数据计算得到的平均值。
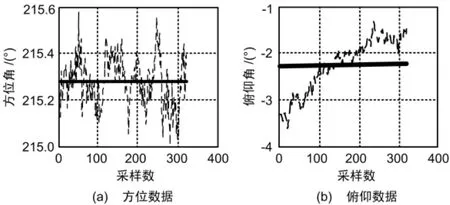
图3 第1组实验设备1输出的数据
根据前述实验原理对数据进行分析和处理,计算出每组GPS测量数据的均值,利用全站仪测量每次设备的航向姿态调整后得到的4个GPS天线的坐标值。以某一序列数据为基准,计算GPS和全站仪各自的角度差,将全站仪的角度差作为数据真值,就可获得GPS方位角、俯仰角的角度误差和均方根误差。从而评定其系统方位和俯仰角的测量精度,最后得到方位和俯仰角均方根误差分别为0.9531°和1.34°。以上数据处理结果,GPS航向测姿设备的方位角和俯仰角测量数据能够满足某型测量设备对航向姿态测量指标要求。
4 结束语
在现有载体环境条件下,利用2套GPS双天线测量设备实现多GPS天线测量载体实时的航向姿态,是根据现有的测量技术及设备实际情况,总结有关经验进行的新尝试,在项目建设工程实践中,得到了充分验证,取得了较好的效果,可以提高效率,节约经费。研制成功的装备在实际使用中,航向姿态测量信息满足了装备使用要求。 ■
[1]武 征,孙 翱,任冰明,等.海上靶场试验测控技术[M].北京:国防工业出版社,2007:417-429.
[2]陈俊勇.GPS现代化和 Galileo运行准备的进展[J].测绘通报,2005(3):1-5.
[3]韩 玲,朱文耀.Galileo系统及其在中国的应用[J].天文学进展,2005,23(1):10-28.
[4]周忠谟,易杰军,周 琪.GPS卫星测量原理与应用[M].北京:测绘出版社,1999:166-178.
[5]徐绍铨,张华海,杨志强.GPS卫星测量原理与应用(第 3版)[M].武汉:武汉大学出版社,2008:89-99.
[6]查尔斯F,范 龙.Leica(TPS1200)简明手册中文1.0版[M].上海:同济大学出版社,2005:30-35.
[7]王学辉,张明辉.Matlab6.1最新应用详解[M].北京:中国水利水电出版社,2002:176-180.
[8]黄云清.数值计算方法[M].北京:科学出版社,2010:50-55.
