基于模糊控制的潜艇高压气自动控制研究*
2012-10-16聂海英丁风雷
聂海英 丁风雷 刘 军
(1.海军潜艇学院研究生队 青岛 266042)(2.海军潜艇学院作战指挥系 青岛 266042)(3.海军潜艇学院训练部潜艇模拟器训练中心 大连 116023)
1 引言
高压气是潜艇操艇系统的重要组成部分,其使用时机非常关键,是否使用高压气是潜艇操纵人员需要考虑的关键问题;潜艇高压气的使用具有不可逆和非连续性,故高压气使用和控制必须把握三个时间点:供气时机、停止供气时机和解除气压时机[1]。利用传统的PID控制方法对高压气进行自动控制,其可能性很小。模糊控制是一类应用模糊集合理论的控制方法,尤其是当受控对象含有不确定性,而且很难用常规非线性控制理论处理时更为有效。根据潜艇高压气控制特点,采用模糊控制是合理的选择。同时综合利用潜艇指挥员的操纵经验,设计模糊控制器对潜艇高压气进行控制,当舱室破损时,自动实现供气、停止供气和解除气压。
2 潜艇基本运动控制模型
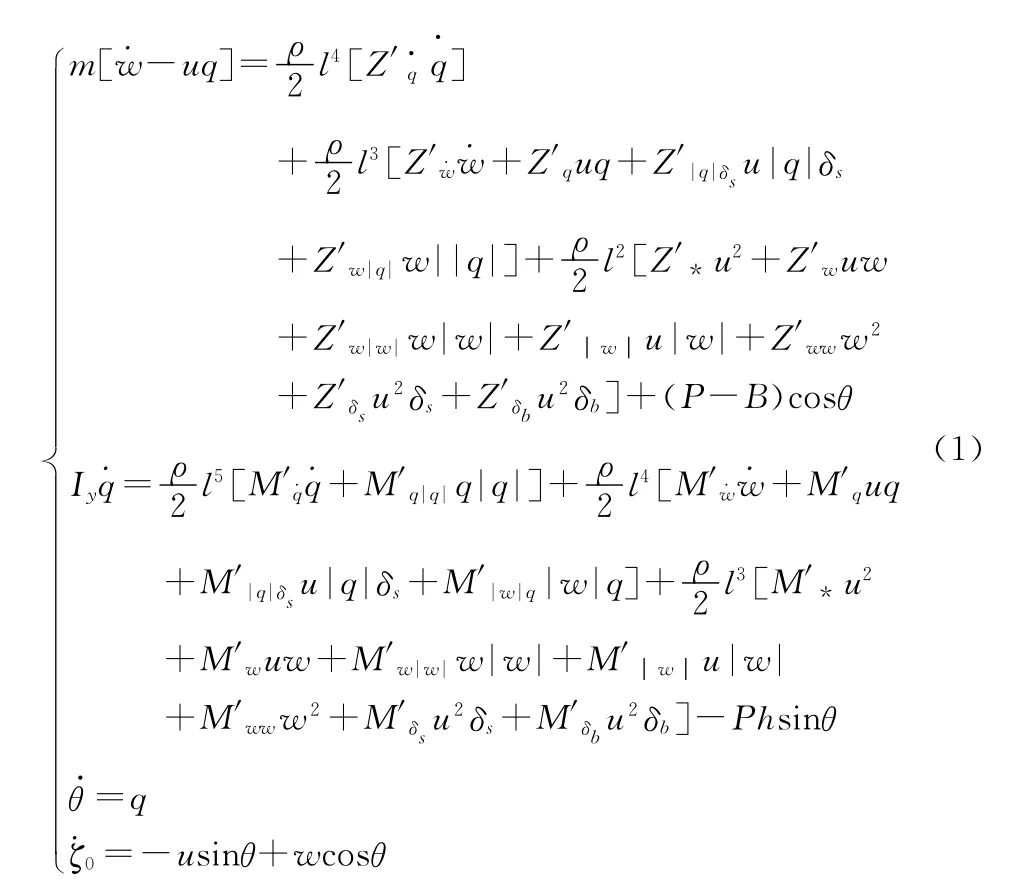
本文采用垂直面操纵非线性方程作为潜艇基本运动控制模型[2],其表达式如下:
3 潜艇高压气模糊控制器
模糊控制器的结构[3]如图1中虚线所示:
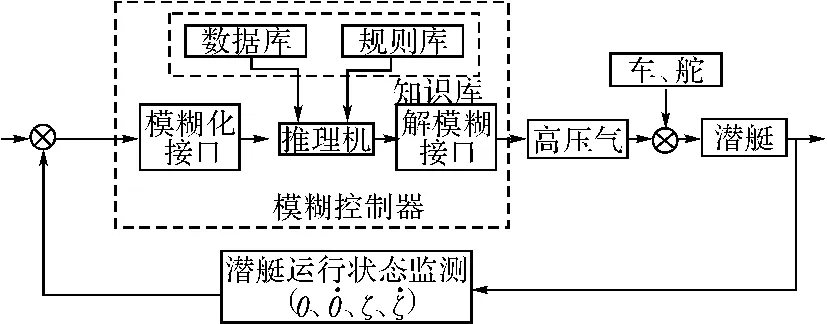
图1 潜艇高压气模糊控制器
3.1 隶属函数确定
模糊控制器选用多输入—单输出模糊控制器,它的四个输入分别为纵倾θ、纵倾变化率、深度差Δζ和深度变化率。输出量为高压气控制信号U。
纵倾θ的模糊集为:{NB,NM,NS,ZO,PS,PM,PB};论域为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
深度差Δζ的模糊集为:{NB,NM,NS,ZO,PS,PM,PB};论域为:{-3,-2,-1,0,1,2,3}。纵倾变化率θ·的模糊集为:{NB,NS,ZO,PS,PB};论域为:{-3,-2,-1,0,1,2,3}。
控制信号U 的模糊集为{NB,NM,NS,NZ,ZO,PZ,PS,PM,PB};论域为:{-4,-3,-2,-1,0,1,2,3,4}。
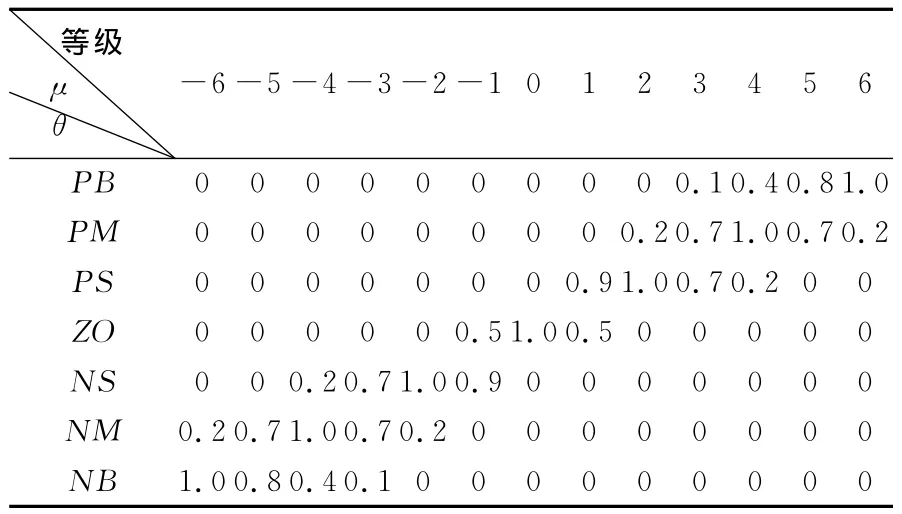
表1 模糊变量θ的赋值表
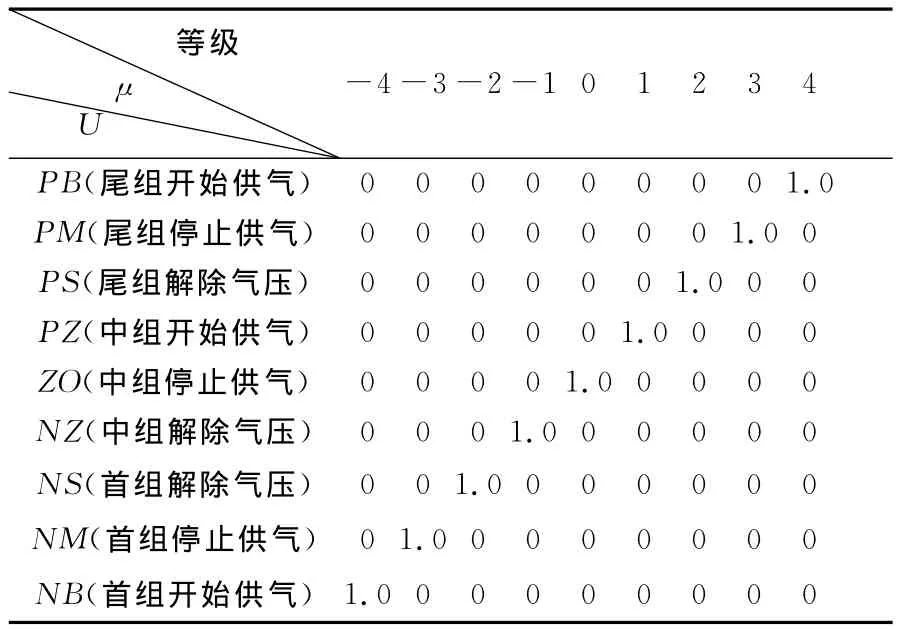
表2 模糊变量U的赋值表
与纵倾θ相应的隶属度值如表1所示,与高压气控制信号U相应的隶属度值如表2所示。
3.2 模糊控制规则
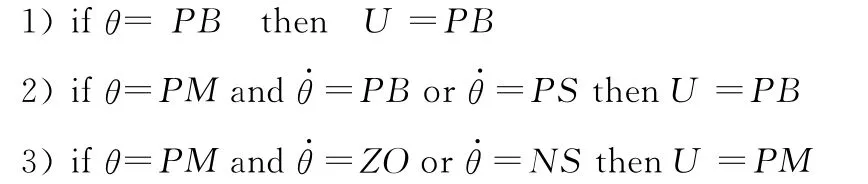
在模糊控制规则的建立过程中,通过与潜艇操纵方面的专家(优秀潜艇指挥员、潜艇操纵理论研究人员、实验室模拟器操作人员)交流、探讨,总结成初步经验集,然后进行大量的人工操纵仿真实验[4],验证了所获取经验的有效性,并对部分应急操纵方法进行了定量分析,最后通过相同抗沉目标下的多方案比较,总结出共21条模糊控制规则,其中的前3条如下所示:
3.3 模糊推理
根据3.2节提出的糊控制规则,通过模糊计算求出模糊控制结果,然后再做一次转换,求得清晰的控制量输出,即模糊解,在本控制器中,结果U为离散的模糊矢量,采用式(2)进行转化。

在此过程中,将模糊控制器进行必要的简化,如首、尾组主压载水舱高压气的控制量仅仅依据潜艇的纵倾和纵倾变化率;中组主压载水舱高压气的控制量仅仅依据潜艇的深度差和深度变化率。此时,原来的多输入—单输出控制器解耦为单输入—单输出控制器,从而降低了控制器的复杂度。最后利用计算机可将预先计算好的控制量U制成控制表,作为文件存储在计算机中。当进行实时控制的时候,便于根据输出的信息,从文件中查询所需采取的控制策略。
4 仿真分析
用前述控制策略设计高压气模糊控制器,以某型潜艇为仿真对象[5],式(1)为运动控制模型,应急上浮到水上状态为控制目标,对潜艇不同破损情况下高压气进行自动控制,假定舱室不进行供气支顶,不进行升降舵控制。仿真结果如下所示:
1)潜艇初始深度50m,航速4kn,Ⅰ舱发生破损,破损面积0.05m2,在进水40t左右时堵漏成功。
2)深度50m,航速4kn,Ⅲ舱发生破损,破损面积0.06m2,在进水55t左右时堵漏成功。
3)深度100m,航速4kn,Ⅵ舱破损,破损面积0.04m2,在进水50t左右时堵漏成功。
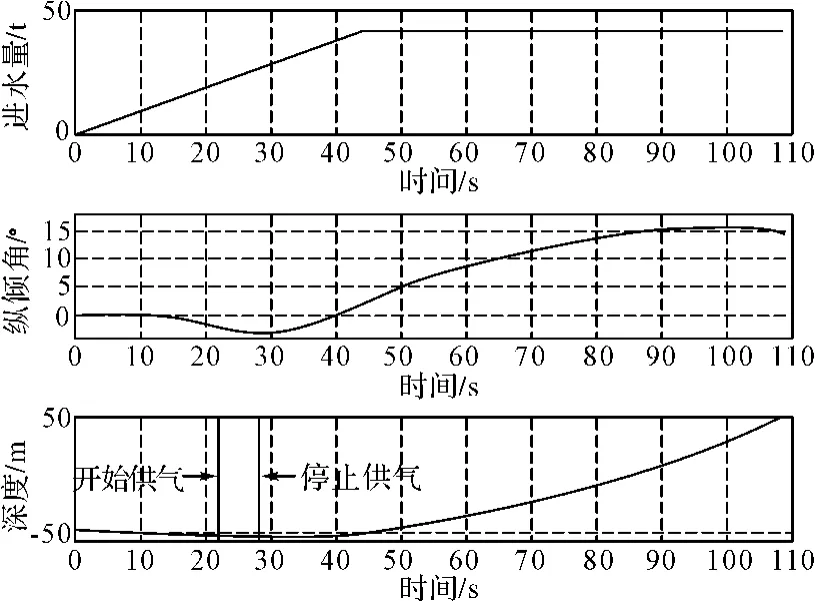
图2 Ⅰ舱破损应急上浮高压气自动控制仿真曲线

图3 Ⅲ舱破损应急上浮高压气自动控制仿真曲线
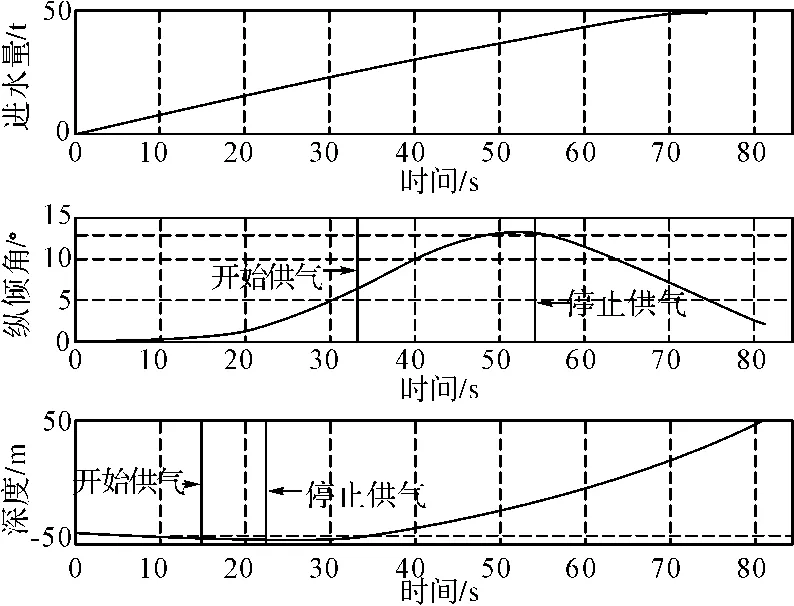
图4 Ⅵ舱破损应急上浮高压气自动控制仿真曲线
图2~图4所示的仿真结果表明:利用该高压气模糊控制系统在处置舱室破损时,以上浮到水上状态为控制目标的应急操纵过程中,具有较好的控制效果,潜艇均能在采取措施后110s左右顺利浮出海面。
5 结语
本文提出了一种基于模糊控制的潜艇高压气自动控制设计构想,通过模糊控制器的设计与仿真表明,在潜艇损失浮力情况下,利用模糊控制器能够较为精确的对潜艇高压气实时自动控制,从而使潜艇较平稳的浮出水面。从而验证了该控制器的有效性,同时也说明了使用模糊控制方法实现潜艇高压气自动控制的可行性。
[1]施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
[2]徐亦凡.潜艇操纵原理与方法[M].北京:兵器工业出版社,2002.
[3]诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005.
[4]徐亦凡,陈丘岳,胡坤.高压气吹除时机对潜艇动力抗沉影响的仿真研究[J].舰船电子工程,2010,30(11):114-116.
[5]胡坤,吴超.潜艇深度模糊控制及其仿真研究[J].系统仿真学报,2004,16(10):64-66.
[6]刘常波,王建,丁风雷.高压气在潜艇自浮操纵中的使用研究[J].舰船电子工程,2010,30(10):141-142.
[7]徐亦凡,陈丘岳,胡坤.潜艇逆速时的垂直面机动仿真分析[J].舰船电子工程,2010,30(12):110-112.
[8]高俊吉,黄昆仑,朱军.潜艇定深运动的自适应模糊控制研究[J].海军工程大学学报,2004,16(2):83-88.
[9]刘常波,王建,丁风雷.潜艇舵卡时高压气的使用时机及仿真[J].四川兵工学报,2010,31(12):1-3.
[10]熊萍,何汉林,王天虹.混沌范德玻—杜芬系统的T-S模糊控制[J].计算机与数字工程,2011(9).
[11]叶剑平,戴余良,李亚楠.潜艇主压载水舱高压气吹除系统数学模型[J].舰船科学技术,2007,29(2):112-115.