基于Labview的刚性转子动平衡测试系统研究
2012-10-13付玉红韦忠朝高信迈
付玉红,韦忠朝,高信迈
(华中科技大学电气与电子工程学院,湖北 武汉430074)
在现代工程技术领域中,动平衡测试分析已成为旋转机械工程的一个重要环节.工程实际中,由于材质不均匀或毛坯缺陷、加工及装配中产生的误差,甚至设计时就具有非对称的几何形状等多种因素,使得转子在旋转时,其上每个微小质点产生的离心惯性力不能相互抵消,离心惯性力通过轴承作用到机械及其基础上,引起振动,产生了噪音,加速轴承磨损,缩短了机械寿命,严重时能造成破坏性事故.为此,必须对转子进行平衡,使其达到允许的平衡精度等级.
随着检测技术的发展,虚拟仪器已经成为动平衡检测仪器的主流.Labview是美国国家仪器公司最典型的软件产品之一,它是一种基于图形编程语言的开发环境.由于其丰富的软件功能和多功能高精度的硬件接口卡,加以PC的友好环境等,在多种自动测试和控制中得到越来越广泛的应用.
1 动平衡测试原理
刚性转子总可以在不与转子重心相互重合、同时与转子轴线垂直的两个校正面上加上(或减去)适当重量来达到动平衡.
动平衡测量时要求转子必须能在支撑系统上被驱动而旋转,支撑系统必须要有必要的自由度,以保证支撑系统在转子不平衡离心力的作用下产生与转子不平衡量成正比的有规律的振动.这样转子支撑系统就组成了一定形式的质量—弹簧系统,进而通过测量支撑的振动而获得转子校正面上不平衡量大小和相位[1].
2 系统主要结构
本实验系统为硬支撑平衡机.系统结构见图1.系统主要由电机、皮带轮左右支撑,左右压电式加速度传感器、光电传感器、NI数据采集卡、下位机、IPC机构成[4].
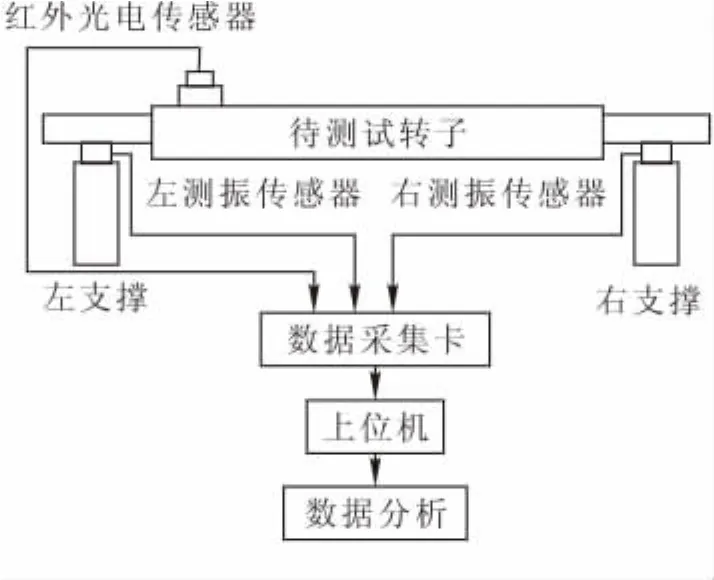
图1 系统结构图
2.1 左右振动信号的获取
转子放在左右支撑上,转子在电机的带动下在皮带轮上旋转,左右支撑处的压电式加速度传感器检测左右振动信号.然后由NI数据采集卡采集左右的振动信号给IPC机的Labview软件分析.
2.2 角度基准信号的获取
在所测试的转子上用彩色笔做个标记,在转子附近安装红外光电接近开关,检测转子颜色变化产生脉冲信号输出,脉冲信号的基频与转子转速相同.然后由NI数据采集卡采集角度基准信号给IPC机的Labview软件分析.
3 测试系统软件设计
软件部分包括:系统参数初始化、动不平衡振幅和相位分析、影响系数计算、动不平衡质量和相位计算、数据保存、串行通信.

图2 程序流程图
程序设计主要思路:系统采用影响系数法来得到转子不平衡量和相位.首先利用交叉谱分析和FFT谱分析从数据采集卡得到振动信号和角度基准信号,得到最大振幅的相位和幅值[2].然后根据加抑制质量的不平衡量得到单位质量对左右振动信号幅值和相位的贡献,从而得到影响系数.最后用影响系数与得到的转子不平衡振动的幅值和相位做乘积,即可得到所测试转子的左右失重质量和角度.
3.1 转子动不平衡分析模块 Unbalance daq.vi—振动幅值和相位的提取
利用Labview生成波形模块,生成数据采集卡,采集到左右振动信号和角度基准信号响应的波形.然后将左右振动信号分别与角度基准信号做交叉谱分析.利用角度基准信号可以得到平衡转速,即基准频率fN.检测0.9 fN与1.1 fN的数据,得到左右振动信号的最大振幅的相位[3].
同时分别对左右振动信号做FFT谱分析,利用前面所得到最大振幅的相位所对应的频率去检索其所对应的最大振幅值.为了防止频谱泄露并得到振动信号中的基频信号的频谱,需要对连续信号进行正周期采样,在转子的每个旋转周期内按照预定的采样点数和采样频率对一个周期内的连续信号进行采样.
这样就得到了转子不平衡振动信号的振幅和相位.
3.2 影响系数的计算[5]
基本思路:
1)调用Unbalance daq.vi对转子做动不平衡分析,得到左右振动信号的幅值和相位,合成左右振动力矩矢量XL、XR.
2)在左校正平面的指定位置上加标准质量点在指定位置上,同样调用Unbal ance daq.vi对转子做动不平衡分析,得到左右振动信号的幅值和相位,合成左右振动力矩矢量XL1、XR1.
3)在左校正平面的指定位置上加标准质量点在指定位置上,同样调用Unbal ance daq.vi对转子做动不平衡分析,得到左右振动信号的幅值和相位,合成左右振动力矩矢量XL2、XR2.
根据不平衡离心力矩叠加原理,分别计算左右两个校正面在已知位置加载标准质点对不平衡的影响系数,具体如下:

aL1、aL2、aR1、aR2是在指定位置施加已知质点时,单位质量对不平衡力矩的贡献,对矩阵求逆矩阵就可以得到影响系数.其中包含四个振幅影响系数和四个相位影响系数,即

3.3 转子不平衡质量和相位的计算
调用Unbalance daq.vi对转子做动不平衡分析,得到左右振动信号的幅值和相位,合成左右振动力矩矢量.
根据unbalance daq.vi计算出的angle of signal R(θR)和 a mplitude of signal R(AR)计算转子右校正平面的失重力矩(TR)
根据b ms01_data.vi得到的振幅影响系数和相位影响系数,可以分别计算左失重和右失重的质量和角度.

3.4 数据保存
将转子左右不平衡质量和相位保存并显示.数据存储使用了Lab VIEW的写入测量文件,在该VI弹出的设置对话框中可以选择文件的存储格式:文本文件类型、二进制类型和带XML的二进制类型,用户可以根据不同目标选择所要存储的类型.本系统选择了文本文件类型.
同时可以将左右不平衡质量和相位在PC界面上显示.将左右不平衡质量和相位通过串口通讯传递给下位机,使其对转子进行校正.
4 试验结果
此系统已经实际应用于工业中,实践证明此系统性能良好.测试结果体现了测试过程便捷、测试数据精度较高的特点.系统充分应用了NI数据采集卡和虚拟仪器的强大软件资源,保证了整个测试数据的准确性、有效性以及实时性.整个系统运行可靠、人机交互界面友好、操作简单、测试结果的精度较高.
[1]叶能安.动平衡原理与动平衡机[M].武汉:华中工学院出版社.1985.
[2]吴成东.Labview虚拟仪器程序设计及应用[M].北京:人民邮电出版社,2008.
[3]胡广书.数字信号处理一理论、算法与实现[M].北京:清华大学出版社,1997.
[4]唐治宏,刘景能,黄炳琼.基于Lab VIEW的便携式动平衡测试系统研究[J].装备制造技术,2007(6).-
[5]张 健,邱清盈,武建伟,等.基于卡尔曼滤波的动平衡测量过程调节方法[J].浙江大学学报,2011,45(10):1 815-1 820.
