开关磁阻电机在家用食物料理机中的应用
2012-10-13韦忠朝
张 珍,韦忠朝
(华中科技大学电气与电子工程学院,湖北 武汉430074)
家用食物料理机动力源常用的串激电机是有刷结构,易产生火花,长时间使用,电刷会磨损.可作为替代的有感应电机(启动转矩小,负载过大则电机无法转动)、永磁无刷直流电机(磁铁价格高,较少采用)和开关磁阻电机.开关磁阻电机相对于感应电机起动转矩大,制造比永磁无刷直流电机简单,成本较低;与串激电机相比,又有更宽的调速范围,成为家用食物料理机动力源的发展趋势.C8051F310单片机是一种新型SOC型单片机[1],将其应用于开关磁阻电机的控制,可充分利用其片上的资源,且单片机快速的指令执行有利于实现开关磁阻电机高性能的控制.本文以C8051F310单片机为控制器核心,实现了对一台6/4结构开关磁阻电机的控制,并实验验证系统运行效果.
1 开关磁阻电机工作原理
开关磁阻电动机控制系统主要由开关磁阻电动机(SRM)、功率变换器、转子位置检测器及控制器四部分构成[2](图1).

图1 开关磁阻电动机调速控制系统的构成
本系统中,SRM 为三相(6/4)结构,功率变换器选用不对称半桥电路的拓扑结构,位置检测器采用光电式位置传感器,控制器采用以C8051F310单片机为核心的控制系统.

图2 开关磁阻电动机动作原理图
开关磁阻电机的工作原理要遵循“磁通总要沿着磁阻最小的路径闭合”原则[3].如图2a状态给A相供电,根据上述原则,转子将逆时针旋转,最终使得转子极和定子极对齐,到达图2b状态.从图2a到图2b转子在空间上转过30°机械角度.接着,通电相由A相改为B相,继而B相改为C相.如图2所示,在一个通电周期(A-B-C-A)内,转子在空间上转过一个齿距,按照这样的相序循环通电才能使得转子持续按逆时针方向旋转,输出机械能.
根据机电能量转换原理,可通过磁场储能Wm或磁共能W′m对转子位置角θ求偏导数得到SRM的静转矩,即

假设电机磁路不饱和,即在磁路线性的情况下,有


结合式(1)和式(2),得到假定电感与电流无关,此时,开关磁阻电机的电感随转子位置角的变化曲线见图3.由式(3)可知开关磁阻电机的转矩方向与电流方向无关,而与电感随转子位置角变化的偏导数有关;若>0,只要相绕组中有电流流过,则产生电动转矩;若<0,相绕
组有电流流过,则产生制动转矩.
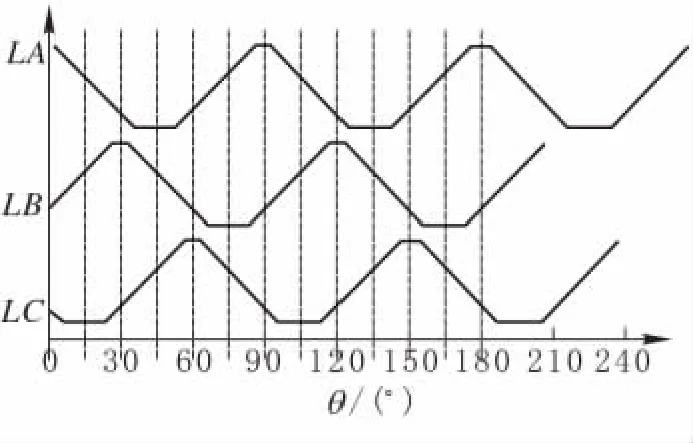
图3 开关磁阻电动机各相电感图
对于m相开关磁阻电机,假定各相具有对称的结构和电磁参数,根据电路定律和电磁感应定律,可以写出其某一相(第k相)的电压平衡方程式为


对于m相SRM,相周期为θcy,则其平均转矩为:


若电机确定,开通关断角恒定,则(4)式积分部分为常数,因此有:开关磁阻电机调速控制的基本原理是控制开关磁阻电机转矩的大小与方向,根据上述分析可知,可通过控制绕组中电流以及其相对与转子的位置来实现.可见开关磁阻电机调速控制的可控参数有:相电流幅值Im、开通角on、关断角off以及绕组电压u.合理地改变这几个参数,即可控制开关磁阻电机的转速.
2 开关磁阻电机的控制策略
开关磁阻电机的典型运行特性分为三个区域:恒转矩区、恒功率区和自然特性区(图4).在恒转矩区,电机转速较低,较小,旋转电势小,使得电流上升很快,又由于处于低速,每相的通电时间较长,因此需对电流进行斩波限幅,避免过流,称为电流斩波控制(CCC)方式,也可采用调节相绕组外加电压有效值的电压PWM控制方式;在恒功率区,电机转速较高,较大,旋转电动势较大,因而绕组电流上升率低,又由于处于较高速每个位置下主开关器件导通时间较短,所以电流无法上升到所需值,因此要通过合理调节主开关管的开通角和关断角来取得恒功率特性,称为角度位置控制(APC)方式;在自然特性区,电源电压、开通角和关断角等可控条件均到达控制极限,为固定值.当转速继续升高时,输出转矩将下降.图4中,n1定义为开关磁阻电机的额定转速,此时对应功率为额定功率,n1也称为第一临界转速;n2为恒功率区的上限,即额定功率内所能达到的最高转速,称为第二临界转速.

图4 开关磁阻电机的典型运行特性图
稳态运行时,控制策略可采取如下两种方式:在n1转速以下,采用电流斩波控制(CCC控制);在n1与n2转速之间,则采用角度位置控制(APC控制).本系统中电机工作在额定转速以下,因此宜采用电流斩波控制的控制策略.
由式(5)知,当负载转矩一定时,转速正比于绕组端电压u,通过PWM斩波方式调节绕组端电压平均值,进而能间接调节和限制过大的绕组电流,从而实现转速和转矩的调节.因此,本系统可采用固定开通角、关断角,而对母线电压斩波控制来实现电流斩波控制的控制策略.

图5 开关磁阻电动机控制系统原理图
开关磁阻电动机控制系统(图5)由电流、转速双闭环构成,其中电流环为内环[4]、速度环为外环.速度反馈信号ω是根据位置传感器输出的转子位置信号计算出来的,与速度给定ω*相减后作为速度环PI调节器的输入,而速度调节器的输出信号则作为电流环的给定值i*,再与由电流采样测到的实际相电流i值比较,得到电流偏差,作为电流环PI调节器的输入,PI调节器的输出作为调制波控制PWM信号的占空比.控制器通过控制功率变换电路中主开关器件的开通关断来调节相绕组两端电压的占空比,实现输出转矩的控制,从而实现调速,以保证系统得到快速的响应.
本控制器以C8051F310单片机为核心,综合外部转速输入给定、位置检测器及其转子位置反馈信号、电压电流采样电路采样的电压电流反馈信号、运行或故障指示信号等等[5],通过C8051F310单片机的分析和计算,按照上述的控制策略,对功率变换器的主开关器件发出开通或关断信号,以完成对开关磁阻电机的高性能控制(图6).

图6 单片机控制系统图
3 开关磁阻电机控制系统的软件设计
本系统采用模块化的编程思想,电机控制程序为主程序无限循环、多个中断程序并行的程序结构(图6).各个中断程序的主要思想是,母线电压、绕组电流以及给定速度值是电压采样硬件电路、电流采样硬件电路和外部速度给定硬件电路通过C8051F310单片机的AD转换得到.光电位置传感器电路输出的3路位置信号,可通过IO输入而后通过定时器T0计算得到实际速度.通过闭环调节计算,确定PWM占空比来重新确定PCA捕捉比较模块比较寄存器的值,从而获得控制统所需要的新的PWM控制信号,PWM控制信号经过驱动电路放大,进一步控制开关器件,从而实现开关磁阻电机的高性能控制.

图7 控制流程图
3.1 主程序的设计
主程序主要是对系统进行初始化,并循环等待进入中断响应,其流程图简单(图8),它包括三个环节:系统初始化、电源测试和循环等待.
3.2 子程序的介绍
3.2.1 电流采样、电源电压采样、速度给定的实现
在本文中,电机速度的调节是通过手动实现的.通过调节电位器的旋钮,使得电位器的电位发生变化,把变化后的电位通过硬件电路处理后,送入C8051F310单片机的ADC模块,在单片机内部经过模数转换,将转换后得到的数字值送入单片机指定的数据单元中保存(图9).

图8 主程序流程图

图9 ADC中断流程图
3.2.2 转速计算及换相子程序 T0定时器的中断周期是33μs,位置信号的输入是通过C8051F310单片机的IO口对3路光电位置传感器输出信号进行实时检测实现.该程序定时查询转子位置信号,检测其变化,并记录相邻2次信号变化的时刻,由此计算开关磁阻电机的实际转速.根据转子当前位置和实际转速,精确控制各相开关管的通断,完成换相,并为系统实现转速闭环控制提供转速反馈(图10).
3.2.3 软件抗干扰设计(数字滤波子程序) 为提高系统的可靠性,在硬件抗干扰措施基础上,增加软件抗干扰设计作为补充.本系统中,软件抗干扰技术采用算术平均滤波法.即连续取N个采样值进行算术平均运算,本系统N=4.这样可以获得较准确的测量值,减小测量误差,提高了精度(图11).

图10 T 0定时器中断流程图

图11 数字滤波程序流程图
3.2.4 T2中断子程序(电压PWM 计算子程序)
此中断程序由T2定时器确定每次进入中断的时间,主要是由速度PI控制子程序构成的.这个程序用来调节开关磁阻电机的速度和确定对绕组的输出驱动PWM波.通过速度PI控制算法对PWM斩波占空比进行实时更新.
4 实验结果
图12为系统的整体框图,对开关磁阻电动机整个控制系统进行了实验.开关磁阻电机参数如下:额定功率400 W;额定转速10 000 r/min;额定电压310 V;定转子极数6/4;相数3.在220 V交流供电情况下,带负载驱动电机.
本实验中,位置检测器由3个光电编码器组成,每两个相邻光电编码器中心线的夹角是30°.码盘为4齿4槽,齿槽均匀分布.通过位置信号可计算出开关磁阻电机运行的实际速度,用于速度反馈;还可以利用位置信号进行对功率开关器件的开通、关断控制和电机换相控制.本系统的位置信号波形见图13,跟理论分析的一样,是占空比为50%的方波,相与相之间相差120°电角度.一个通电周期内,有6个不同状态.
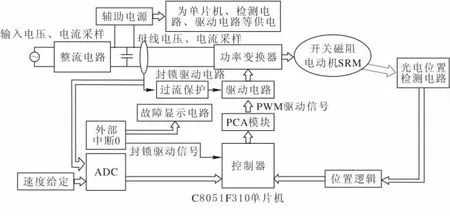
图12 开关磁阻电动机控制系统整体图

图13 两相转子位置信号波形
由图14可以看出,在闭环调速时,上管采用180°导通PWM斩波方式.通过调节PWM的占空比D,从而调节母线电压加在相绕组上的有效时间,改变了相电压有效值,进而实现调速.
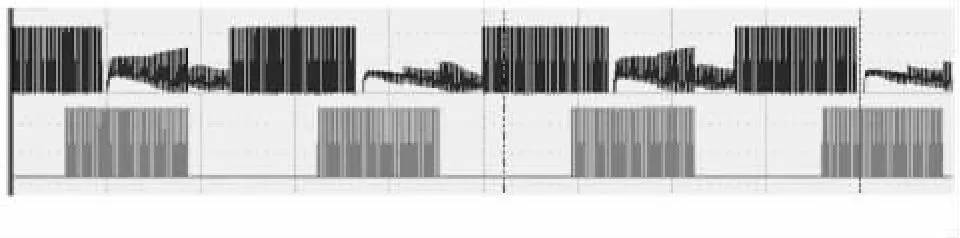
图14 两相上管驱动信号波形
实验测得电机一相的电压电流波形如图15图16所示,可以看出电机在低速和高速运行时电流波形是有差别的.在较低速时,电流上升很快,在较高速时,电流上升比较慢.经过电压PWM斩波后的电流波形较平稳,对电机冲击较小.而且本实验中电机在任何位置都可以起动,没有起动的死区,运行可靠.实验实测波形与理论分析吻合,验证了开关磁电机应用于新领域的可行性.

图15 低速下,某一相绕组上电压和电流波形

图16 较高转速下,某一相绕组上电压和电流波形
5 结论
本文主要对开关磁阻电机控制系统进行设计与研究,并进行了实验.实验数据和波形反映整个系统运行情况良好,工作可靠,进一步验证了开关磁阻电机优良的性能.
[1]Silicon Laboratories.C8051F31x DataSheet[EB/OL].(2004)http://www.xhl.co m.cn.
[2]詹琼华.开关磁阻电动机[M].武汉:华中理工大学出版社,1992.
[3]王宏华.开关磁阻电动机的调速控制技术[M].北京:机械工业出版社,1995.
[4]马志源.电力拖动控制系统[M].北京:科学出版社,2004.
[5]王伟炳,杨志超.基于T MS320F2812DSP的开关磁阻电机直接数字控制系统设计[J].微电机,2011(4):50-51,90.
[6]童长飞.C805l F系列单片机开发与C语言编程[M].北京:北京航空航天大学出版社,2005.
