用于海气界面微尺度过程观测的水槽设计与实验
2012-10-13王岩峰黄振兴高军伟
官 晟, 王岩峰, 黄振兴, 高军伟
(1. 国家海洋局 第一海洋研究所, 山东 青岛 266071; 2. 青岛大学 自动化工程学院, 山东 青岛 266071)
海气相互作用的范围跨度大、作用时间长, 对天气和气候影响深远, 是全球变化中的重要因素。海气相互作用已成为大气科学和海洋科学中重要的研究课题。
海气相互作用研究的前提是大量的观测数据。针对海气作用不同尺度过程, 可以利用船舶、浮标、飞机、雷达、卫星等工具, 在水下、边界层和空中同时进行立体观测。然后, 采用不同的数值模式, 利用大型计算机进行各种尺度海-气相互作用的数值模拟。但海气相互作用中一个非常重要的方面——微尺度过程(毫米级到米级尺度)却一直面临观测难的局面。许多微尺度过程具有典型的间歇性湍流运动特征, 其测量的难点在于如何快速、准确地获取各要素的快速变化, 研发合适的传感器和观测平台一直是科研人员努力的方向。
为解决微尺度过程现场观测中存在的问题, 室内模拟仿真实验研究一直是很重要的方法, 即利用多功能水槽对海气界面的微尺度过程进行模拟, 在此基础上开展系列观测研究[1]。模拟过程包括: 微尺度波浪的形成及破碎过程; 界面的能量传输; 表层的物质输运过程; 界面和水体内部的湍流混合过程等。微尺度过程模拟水槽可以为海气相互作用研究提供一个高效、便捷的室内实验平台, 从而获得大量、稳定的研究数据。而我国对于海气界面微尺度过程的观测目前还处于国际20世纪90年代的水平,特别是偏重于机理研究的室内实验设施更为稀少。因此, 本文在现有技术基础上, 参照国际前沿观测技术及设备的发展水平, 设计、建设了一座应用于海气相互作用研究的小型多功能水槽, 并开展了初步的试验研究。
1 水槽功能设计
小型多功能水槽在功能设计上应能满足包括微尺度坡度场、界面微尺度的湍流混合、界面的辐射及传输等微尺度过程特性及参数的观测需要, 鉴于微尺度过程易受扰动的特点, 测量手段尽量选择非接触方式, 因此声光测量是主要的方式。
1.1 海面微尺度坡度场观测
对海面坡度场的时序观测可以较好地获取海表面毛细波和毛细重力波的运动特征。而海表面毛细波和毛细重力波的运动特征受到各种环境因素的调制, 对于理解海气界面动量热量和物质交换过程、电磁波与波浪间相互作用机制、波浪能量耗散等至关重要。非接触的光学方法是目前测量海面微尺度坡度场的最佳选择。本水槽采用了颜色编码技术[2]。
1.2 界面微尺度湍流混合动力过程光学测量装置性能设计
波浪破碎是近海面湍流混合增强效应的主要驱动机制, 同时海水内部的湍流混合能使流体的动量和热量, 以及所含的盐分等物质的扩散过程显著增强。在海洋中, 无论湍流的尺度或强度, 其垂直分量和水平分量通常都极不相同, 对其四维(三维空间加一维时间)的测量是理想的观测方式。三维数字粒子图像测速(DPIV)是室内水槽湍流混合观测的主要技术手段[3-4], 同时考虑采用声学多普勒流速仪(ADV)作为惯性副区单点测量的补充[5]。
1.3 界面热辐射测量装置性能设计
由于大气对太阳的短波辐射是近乎透明的, 所以到达地球表面的太阳辐射能大部分被海洋所吸收。这些能量再通过红外辐射、感热通量和潜热通量的方式向大气输送。海气间的热交换不仅对天气过程的形成有重要影响, 而且对长期气候过程有巨大作用。由于海面波动以及海水皮温与体温的差异,使得对界面水温接触式、单点测量会产生较大偏差,因此, 海气热交换在近20年里越来越多采用红外摄像直接测量海面辐射量的方法[6-7]。
1.4 水槽造风、造波性能设计
为有效模拟上述微尺度过程, 多功能水槽需要具备造风、造波功能。根据建设场地及水槽总体尺寸的要求, 结合测量系统的观测范围, 要求造风、造波能力为最大波高 20 cm以上; 最大风速不低于15.0 m/s, 风速均匀, 在观测段内变化不超过±0.3 m/s。
2 水槽功能实现方案
2.1 水槽功能结构设计
小型多功能水槽由钢化玻璃水槽、造波系统、造风系统、控制柜、仪器挂架、用于挂架移动的平行导轨、波高传感器、风速和温度传感器以及控制测试软件等部分构成。图 1为水槽结构示意图。造波功能由伺服电机提供动力, 通过线性模组带动造波板, 在水槽内激起不同波长和波高的规则波或不规则波。通过导流板和消波材料, 在水槽末端实现消波功能。造风系统由轴流风机提供动力, 空气通过进风口、导风板、风道等部分, 在水槽实验段形成均匀风场, 从而在水面激起微幅波。水槽底部设置有光学实验预留的通光孔。水槽实验段集成微结构光学测量装置、测量湍流运动过程的粒子成像速度仪(PIV)、测量混合扩散过程的激光诱导荧光成像装置(LIF)、高精度红外热象仪以及声学多普勒流速仪(ADV)等系统。

图1 小型多功能水槽结构示意图Fig.1 The structure of small multi-functional flume
2.2 海面微尺度坡度场光学测量装置系统方案
利用光学方法对海面坡度场信息的提取是从 20世纪40年代开始的, 至今已有数种较为可行的测量技术, 包括太阳光耀斑摄像技术、光强编码技术、激光探测装置和扫描式激光坡度仪、立体观测和颜色编码技术等[8]。光学方法的主要原理是利用光线在海气界面的折射和反射现象, 观测入射角和反射角的信息, 推算坡度场的斜率分布。国际上以美国Scripps海洋研究所、Woods Hole海洋研究所、德国Heidelberg大学等研制的测量装置为代表。国内研究者在国家 863计划的支持下, 完成了利用颜色编码技术进行海面微尺度坡度场观测的实验室和船用的海面微结构光学测量装置, 观测技术指标达到国际同期水平。
沿用国内已研究过的, 并符合国际发展趋势的颜色编码技术, 是制定小型多功能水槽中微结构测量装置技术方案的较好选择。系统基本工作原理如图 2所示。设置于水槽下适当高度的光源均匀照明其上方的彩色编码器。彩色编码器位于水下透镜的焦面上, 因此二维编码的彩色光线经透镜后, 均以平行光射入水槽中。这些彩色平行光经过水槽内水面波浪折射后, 被设置在水槽正上方空中的摄像系统捕获。由于只有垂直向上的光线能进入摄像系统,因此获取图像中每一个像素单元的彩色灰度或色调与水面该像素区域波浪的斜率是一一对应的。经过计算机图像处理, 即可获得摄像区域水面微结构的全貌。而分析(连续)时序记录的多幅图像, 即可获得水面微结构随时间的变化情况。摄像系统选用索尼公司 3CCD 相机 DXC-990P, 变焦镜头选用S206.4BMD 型, 短弧氙灯功率 150 W, 菲涅尔透镜型号为NT46-392。

图2 微结构光学测量装置系统Fig. 2 Sketch of the micro-structure measurement system on seawater surface
2.3 界面微尺度湍流混合动力过程光学测量装置系统方案
PIV技术能以光学无接触式的方式, 在同一瞬态记录下大量流体空间点上的速度分布信息, 可提供丰富的流场空间结构以及流动特性。因此, 利用2D/3DPIV技术可以实现微尺度过程的二维和三维运动场测量以及二维示踪物的扩散和混合过程测量。
PIV系统采用丹迪公司(Dantec)产品。系统由Dynamic Studio软件、4M相机、新型高速相机以及内置式的时序控制板组成, 可以完成从极低速度的几个毫米每秒到超音速测量。激光器采用NewWave公司双腔 PIV 激光器, 该激光器拥有更短的脉冲间隔时间, 使得 PIV 测量由低速扩展到高速。同步单元采用内置式时序控制板, 其漂移对速度的影响可以控制在 1×10–7m/s(100 m/s时)以下。片光源采用80×70系列产品, 可以改善传统片光源在高能量(120 mJ以上)光束下的片光质量。坐标架位移系统选择适合小流场的精确测量型号, 移动精度为每300 mm存在±5 μm的误差, 具有6.25 μm的移动分辨率。上述设备的组合可实现速度测量范围0~6 m/s; 视频采集速度30 帧/ s。另外还配有LIF模块, 可同时提供荧光温度场的测量。
ADV系统选用 NORTEK公司的两款新型流速仪Vector和Vectrino。2套流速仪安装于平行轨道上,在水槽二维平面内滑动, 采用非接触方式测量不同点位流速。Vector采样频率1~64 Hz, 最大流速范围±7 m/s, 采样体直径 15 mm。Vectrino采样频率1~200 Hz, 最大流速范围±4 m/s, 采样体直径6 mm。
2.4 界面热辐射测量装置系统方案
为满足海气界面过程热辐射变化小的特点, 红外热像系统热灵敏度需尽可能高。综合考虑功能与成本, 界面红外热像系统选用 NEC公司产品TH5104R。测量范围–10~800℃。温度分辨率0.1℃(30℃时), 优于市场上绝大多数产品的1℃。像素数255(H)×223(V), 适合捕捉微尺度空间的变化。
2.5 水槽造风、造波系统方案
水槽必须具备造风、造波、消波等功能, 能够一定程度上模拟海面的运动变化, 形成观测海气界面微尺度过程的模拟对象系统。目前, 主流的造波方式有机械式和气动式两种。气动式是利用空气气流或者气压的变化产生波动。机械式是通过造波部件的机械加扰动来产生波动, 也是应用较多的方式。机械式中, 又以摇板式和推板式应用较为广泛。所谓摇板式就是通过机械驱动, 令摇板绕固定轴摆动, 使池中水产生波动; 而推板式是造波板整体在水中做直线往复运动。由于水槽主要用于模拟海洋表面的小尺度波动情况, 结合室内的可利用空间条件, 并考虑到尽量减少水下机械结构、降低能耗、减小机械系统作用力等因素, 摇板式方案成为较好的选择。图3为摇板造波机示意图。
设计造波波长范围 0.05~1.5 m, 最大波高不小于0.2 m; 波谱类型包括Pierson-Moskowitz谱、ISSC谱和Neuman谱, 自定义波谱。造波重复性误差小于2%。
在水槽顶部加盖密封盖板, 构成风罩, 与玻璃水槽形成风道, 在水槽尾部上安装轴流风机, 以抽风的方式在水槽内造风。为使进风流畅、风速均匀,在水槽前端靠近摇板处安装进风口, 在进风口的下端安装可调仰角导风板。造风系统结构如图4所示。造风最大风速不低于15.0 m/s, 风速均匀, 在观测段 内变化不超过±0.3 m/s。

图3 摇板造波机示意图Fig. 3 Sketch of the shake-flap wave making system

图4 造风系统示意图Fig. 4 Sketch of the wind making system
造风造波功能控制软件以Labview为开发平台,完成信息采集、模式计算、控制实现等功能。造风控制模块主要功能是通过控制风机变频器实现风道风速的闭环控制。造波控制模块的主要功能是通过对运动控制卡的编程, 控制摇板伺服系统, 进而实现波高和波长的闭环控制。
3 实验及结论
3.1 造风、造波系统
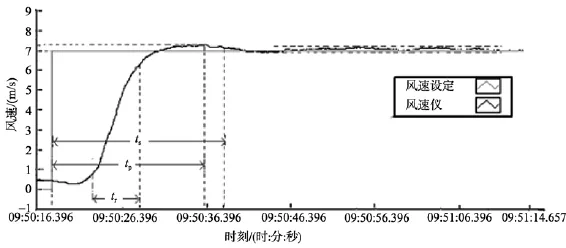
图5 风速7 m/s造风实验槽内风速响应曲线Fig. 5 The test results of 7 m/s wind making
造风系统实验结果见图5。
实验中, 目标风速设置为7 m/s。风速上升时间tr为5.5 s; 调节时间ts为15.4 s; 实验段内风速降小于0.3 m/s。实验证明, 造风系统的动态响应快速, 风速精度达到设计要求, 观测段内风速变化小于0.3 m/s, 具有较好的稳定性。
造波系统进行了多组不同规则谱和不规则谱实验。实验结果如图6所示, 其中h为水深,T为周期,H为振幅。规则波波高误差≤4 %, 周期误差≤4 %, 达到设计指标。

图6 规则波测试Fig. 6 The test results of regular wave making
3.2 海面微尺度坡度场光学测量装置系统
微结构光学测量装置在静水和有风条件下获取的水面图像如图7、图8所示。

图7 微结构光学测量装置静水面成像效果图Fig. 7 The image of still water by the micro-structure measurement system

图8 风速8 m/s水面成像效果图Fig.8 The image of water with 8 m/s wind
实验结果证明, 光学测量系统观测幅宽200 mm, 斜率精度1°, 波长分辨率0.3 mm, 测量时间间隔<0.04 s。
3.3 PIV与ADV系统
PIV系统安装结构如图9所示, 流场测量数据如图10所示。
使用 Vectrino测量水槽模拟不同状态下的原始数据如图11所示。
实验数据可以看出, 随着风速的增大, 三个方向上速度方差之和呈上升趋势, 符合试验风速范围内湍流强度的变化规律。
3.4 界面热辐射测量装置系统
分别在无风和不同风速条件下, 用红外相机拍摄水面红外图像。然后, 通过软件导出温度的矩阵分布, 得出温度变化趋势、偏度值和峰度值等数据。

图9 PIV系统安装结构图Fig. 9 The image of PIV system
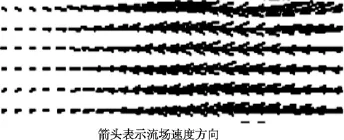
图10 PIV系统流速矢量测量图Fig. 10 The velocity vector image by PIV system

图11 ADV系统测量数据波型图Fig.11 The velocity data by ADV system
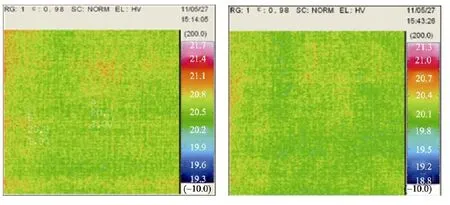
图12 静水及2.5 m/s风速下水面热辐射成像图Fig. 12 Infrared thermal images of water surface with no wind or 2.5 m/s wind
3.5 结论
上述实验证明, 所设计的小型多功能水槽造波机主要分系统都达到了设计指标和目的。系统整体运行流畅, 能够较好地模拟实际海洋环境中海气界面微尺度过程, 可成为海气相互作用研究的试验平台。
[1]陈伯海, 吕红民. 波浪水槽中随机波的模拟[J]. 青岛海洋大学学报, 1998, 28(2):179-184.
[2]Zhang Xin, Cox C S. Measuring the two-dimensional structure of a wavy water surface optically:A surface gradient detector[J]. Experiments in Fluids, 1994, 17: 225-237.
[3]Lawson N J, Wu J. Three-dimensional particle image velocimetry: experimental error analysis of a digital angular stereoscopic system[J]. Measurement Science& Technology, 1997, 8: 1455-1464.
[4]Turney D E, Anderer A, Banerjee S. A method for three-dimensional interfacial particle image velocimetry(3D-IPIV)of an air–water interface[J]. Measurement Science and Technology, 2009, 20(4): 1-12.
[5]Voulgaris G, Trowbridge J H. Evaluation of the Acoustic Doppler Velocimeter (ADV)for turbulence measurements[J]. Atmospheric and Oceanic Technology,1998, 15: 272-289.
[6]Jessup A T, Zeppa C J. Defining and quantifying microscale wave breaking with infrared imagery[J]. Geophysical Research, 1997, 102, C10: 23145-23153.
[7]Garbe C S, Spies H, Jähne B. Estimation of surface flow and net heat flux from infrared image sequences Math[J]. Imaging and Vision, 2003, 19(3): 159-174.
[8]王岩峰, 丁永耀. 光学观测小波方法的比较研究[J].黄渤海海洋, 1999, 17(1): 35-39.