线性相位FIR滤波器频域特性的教学探索
2012-10-12陈后金
薛 健,陈后金,胡 健
(北京交通大学电子信息工程学院,北京100044)
0 引言
FIR数字滤波器是指系统单位脉冲响应h[k] 仅在有限范围内有非零值的滤波器。M阶FIR数字滤波器的系统函数H(z)可表示为

由于FIR数字滤波器很容易设计成线性相位的滤波器,在实际中FIR滤波器有着广泛的应用。
线性相位FIR滤波器的频域特性,是“数字信号处理”课程中的一个重要内容。现有的教材在分析这个问题时采用了几乎相同的方法,即利用四种线性相位FIR滤波器的时域对称特性,分别求出对应的频率响应,分析其频域特性。
本文给出了一种与传统教材不同的分析方法。该方法以Ⅰ型线性相位系统的频率响应为基础,将其他三种类型线性相位系统的频率响应表示为Ⅰ型线性相位系统的频率响应与一简单函数的乘积。该方法的特点是当Ⅰ型线性相位FIR滤波器的频率响应给出后,可以很容易地推得其他类型线性相位FIR滤波器的频率响应。由于将Ⅱ型、Ⅲ型和Ⅳ型线性相位FIR滤波器的幅度函数表示为Ⅰ型线性相位系统的幅度函数与三角函数的积,可由幅度函数表达式方便的得出不同类型线性相位FIR滤波器的频域特性。
1 线性相位条件
若M阶FIR滤波器频率响应H(ejΩ)可写为

式中,α和β是与Ω无关的常数,A(Ω)是一可正可负的实函数,则该滤波器称为广义线性相位系统,A(Ω)称为系统的幅度函数。
如果M阶FIR滤波器的单位脉冲响应h[k] 是实数,则可以证明系统是线性相位的充要条件为[1-3]

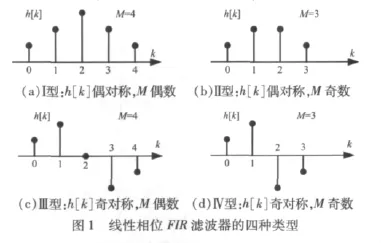
当h[k] 满足h[k] =h[M-k] ,称h[k] 为偶对称。当h[k] 满足h[k] =-h[M-k] ,称h[k] 为奇对称。由于按对称性h[k] 可分为偶对称和奇对称,按阶数h[k] 又可分为M奇数和M为偶数,所以线性相位的FIR数字滤波器有四种类型,如图1所示。
如采利用线性相位FIR滤波器的单位脉冲响应h[k] 的对称性,可得

2 线性相位系统的频域特性
四种不同类型的线性相位FIR系统,由于h[k] 的对称性及滤波器阶数M的奇偶不同,其频域特性各有其特点。
1)Ⅰ型线性相位滤波器(h[k] 偶对称,M偶数)
M阶Ⅰ型线性相位滤波器的频率响应可表示为[4-10]


由上式知,Ⅰ型线性相位系统幅度函数A(Ω)的周期为2π,且有

2)Ⅱ型线性相位滤波器(h[k] 偶对称,M奇数)
由系统的偶对称特性,式(4)可写为

由于M是奇数,将z=-1代入上式可得

所以,H(-1)=0。故Ⅱ型线性相位滤波器可表示为
其中,H1(z)是M-1阶的Ⅰ型线性相位系统。由式(5)可知,H1(z)的频率响应可表示为

综合式(8)和式(9),M阶Ⅱ型线性相位系统的频率响应可表示为
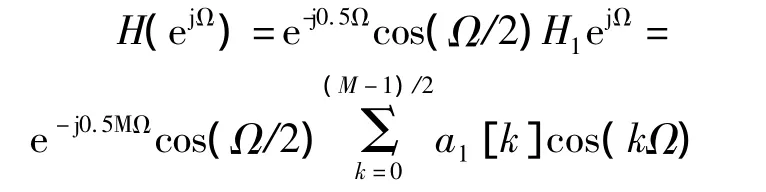
由上式可知,Ⅱ型线性相位系统幅度函数的周期为4π,且

即Ⅱ型线性相位系统幅度函数A(Ω)关于Ω=0偶对称,Ω=π奇对称,并且A(π)=0。所以Ⅱ型线性相位滤波器不能用于高通和带阻等滤波器设计。
3)Ⅲ型线性相位滤波器(h[k] 奇对称,M偶数)由系统的奇对称特性,式(4)可写为

由于M是偶数,将z=-1,z=1代入上式可得

所以H(-1)=H(1)=0。故Ⅲ型线性相位滤波器可表示为

其中,H2(z)是M-2阶的Ⅰ型线性相位系统。
由式(5)和式(10),M阶Ⅲ型线性相位系统的频率响应可表示为
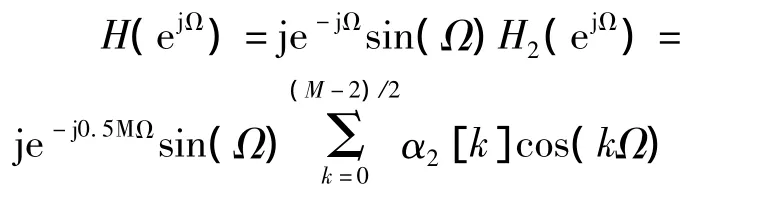

即幅度函数关于Ω=0和Ω=π奇对称,并且有A(0)=A(π)=0。所以Ⅲ型线性相位滤波器不能用于高通和低通滤波器的设计。
4)Ⅳ型线性相位滤波器(h[k] 奇对称,M奇数)
由于M是奇数,将z=1代入式(9)可得H(1)=-H(1),所以有H(1)=0。故Ⅳ型线性相位滤波器可表示为

其中,H3(z)是M-1阶的Ⅰ型线性相位系统。
由式(5)和式(11),M阶Ⅳ型线性相位系统的频率响应可表示为
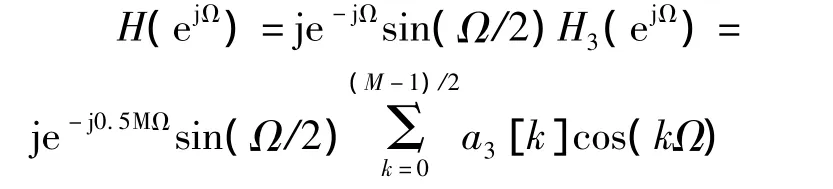
由上式可知,Ⅳ型的线性相位系统的幅度函数A(Ω)的周期为4π,且

即幅度函数关于Ω=0奇对称,关于Ω=π偶对称,并且A(0)=0。所以Ⅳ型的线性相位滤波器不能用于低通滤波器的设计。
3 结语
本文给出了一种分析线性相位FIR滤波器频率响应的方法,该方法简化了线性相位FIR滤波器频率响应的分析过程,突出了FIR滤波器频域特性,便于学生掌握线性相位FIR滤波器频域特性。本文推出的幅度函数的表达式与FIR滤波器优化设计中用到的四种形式FIR滤波器的统一表示一致,但推导过程更加的简单明了,有利于课堂教学的进行和学生的理解,深受学生欢迎。
[1] S.K.Mitra,Digital Signal Processing:A Computer-Based Approach[M] .McGraw Hill,third edition,2006
[2] John.Proakis,Digital Signal Processing:Principles,Algorithms and Application[M] ,fourth edition,Prentice Hall,2007
[3] 黄建国,刘树棠译,离散时间信号处理[M] ,北京:科学出版社,1998年
[4] 胡广书,数字信号处理[M] ,第2版,北京:清华大学出版社,2003
[5] 程佩青,数字信号处理教程[M] ,第3版,北京:清华大学出版社,2007
[6] 高西全,丁玉美,阔永红,数字信号处理[M] ,第2版,北京:电子工业出版社,2010
[7] 吴镇扬,数字信号处理[M] ,第2版,北京:高等教育出版社,2010
[8] 姚天任,江太辉,数字信号处理[M] ,第3版,武汉:华中科技大学出版社,2007
[9] 郑南宁,程洪,数字信号处理[M] ,北京:清华大学出版社,2007
[10] 陈后金,薛健,胡健,数字信号处理[M] ,北京:高等教育出版社,2008
