基于STC12C60S2单片机的帆板控制系统设计
2012-10-08罗乐
罗 乐
(成都工业学院通信工程系,四川 成都 611730)
1 系统构建
本系统主要由CPU模块、A/D转换模块、角度传感器模块、直流电机驱动模块、键盘及显示模块、电源模块等部分组成,系统框图如图1所示.通过调节单片机输出PWM控制驱动电路达到调节直流电机转速的目的,直流电机的转速即为风扇的转速,风速的大小决定帆板与垂直截面的夹角大小[1].再通过角度传感器测得帆板的实际角度,经A/D转换后与事先预置角度对比,将误差角度经PID修正,由单片机再次进行PWM波输出,控制直流电机转速使帆板角度稳定到规定的范围内.

图1 系统总体框图
2 系统硬件电路设计
2.1 CPU单元及部分外围电路
STC12C60S2单片机具有增强型的8051内核,系统稳定,可靠性强,支持宽电压输入,内带10位A/D转换器、8位PWM控制,具有很好的性价比[2].CPU模块及外围电路如图2所示.

图2 CPU模块及外围电路
2.2 角度测量模块
系统要求采集帆板的实际角度以及帆板与垂直截面的实际距离,仅用单片机内的A/D转换器难以达到要求,故采用MAX公司的MAX1241作为外扩的A/D转换器.角度传感器具有阻尼系数小、精度高、功耗低等优点且不会影响帆板的自由移动,所以对角度的测量采用角度传感器以达到对角度的精确测量.由于角度变化范围为0~90°,故测量的最小单位计算公式为ΔR*90/(R*2^N).其中N=12,ΔR为角度传感器的测角电阻段,R为测角传感器的整圈电阻[3].电路如图 3 所示.

图3 角度及距离测量电路
2.3 直流电机驱动电路
L298N内含4通道逻辑驱动电路,是一种二相和四相电机专业驱动器,内含2个H桥的高电压大电流的全桥式驱动器,可以驱动46 V、2 A以下的电机,具有高转矩重量比、宽调速范围、高可靠性的优点[4-5].设计电路如图4所示.
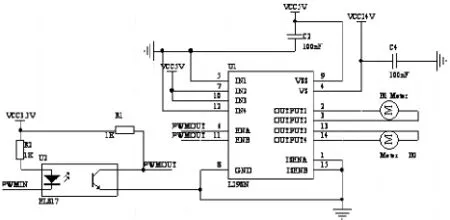
图4 直流电机驱动电路
2.4 电源电路
根据需要制作出满足系统要求的电源,实现效率最大化和系统的完备性,降低电路对外接电源的依赖,提高系统的独立性,电路如图5所示[6-7].

图5 电源电路
3 系统软件设计
根据题目要求,涉及的软件包含对帆板转角、距离的测量,采样数据的处理,电机的控制,键盘及显示等部分.其中,键盘包含预置角度、距离的设置,电压值及输出信号类型的选择;显示部分程序采用菜单界面控制,包含有帆板角度、帆板的距离、电压值、信号类型等参数的显示[8-9].主程序流程图如图6所示.

图6 系统主程序流程图
4 系统测试与分析
4.1 测试环境
测试方案:采用软件仿真测试→硬件测试→软硬件联调测试方式.
测试条件:经多次检查,保证仿真电路和实际硬件电路必须与系统原理图完全一致,且检查无误,实际硬件电路无虚焊、漏焊.
测试仪器:高精度的数字毫伏表,模拟示波器,数字示波器,数字万用表,指针式万用表,量角器,直尺[10].
4.2 测试结果分析
系统在设计完成后,按照如前的条件,在不同的条件下,对系统各方面的性能进行测试,测试结果分别如表1~4所示.其中,手动转动角度值与实测角度值如表1所示;当帆板距离风源的直线距离为10 cm时,按键值、显示值、实测值如表2所示;当帆板稳定在45°时所测参数如表3所示;当帆板距离风源的直线距离为7~15 cm内,预置角度、显示角度和系统达到稳定状态时所需时间如表4所示.
根据如表1~4所示的测试数据可知,整个系统在角度设置、角度的测量和角度的控制上,误差都能控制在较小的范围内.由此表明,设计系统的系统控制精度较为理想,线性度和一致性较好,达到了预期的设计目标,能较好地实现预期的控制功能.

表1 手动转动角度值与实测角度值
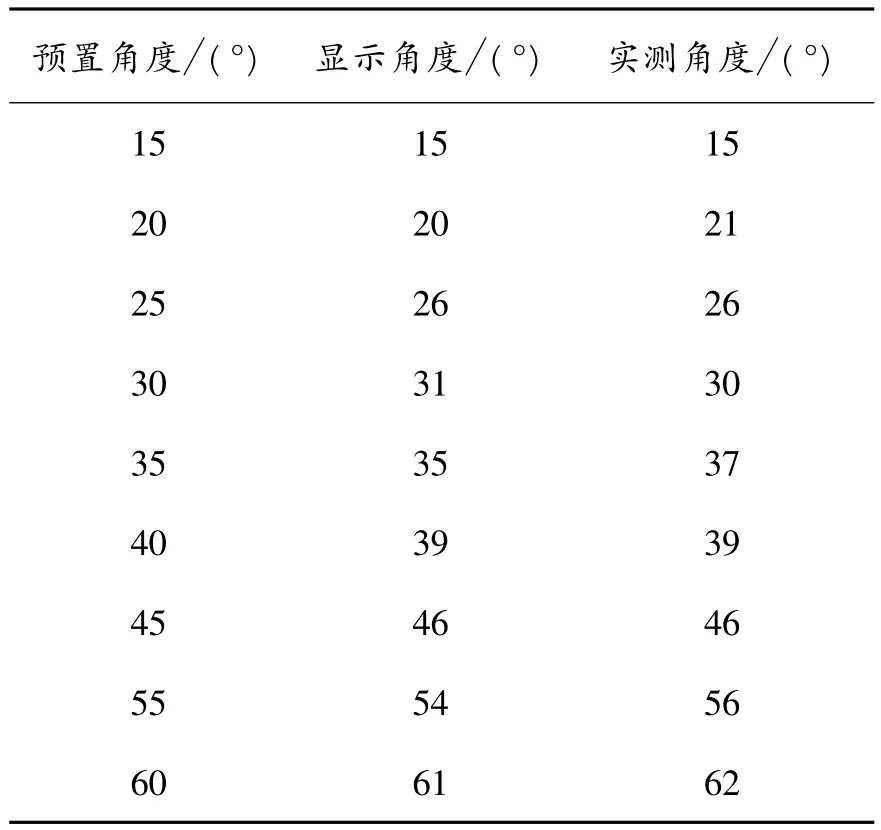
表2 D=10 cm时按键值、显示值、实测值

表3 帆板稳定角度及时间

表4 D=7~15 cm时预置角度、显示角度和稳定时间
5 结语
由测试结果不难看出,本系统运用STC12C60S2单片机,通过PWM对直流电机调速,能够以较小的误差实现对帆板的控制和转角测量,能够在小于规定的时间内对帆板转角45°进行精确且稳定的控制,能够在帆板与风机直线距离为7~15 cm内实现角度和距离的准确测量与显示,能在最短时间之内使系统趋于稳定.
[1]黄智伟.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2010:1-5.
[2]李玉柏.最小系统设计与应用[M].成都:电子科技大学出版社,2012:35-42.
[3]钟洪声.电子电路设计技术基础[M].成都:电子科技大学出版社,2012:207.
[4]Walt Jung,张乐锋,张鼎.运算放大器应用技术手册[M].北京:人民邮电出版社,2009:178-180.
[5]周雪.模拟电子技术[M].西安:西安电子科技大学出版社,2005:35.
[6]陈祝明.电子系统专题设计与制作[M].成都:电子科技大学出版社,2012:56-62.
[7]陈生潭,郭宝龙.信号与系统[M].西安:西安电子科技大学出版社,2002:97-102.
[8]杨欣,王玉凤,刘湘黔.电子设计从零开始:第2版[M].北京:清华大学出版社,2010:440-480.
[9]李朝青.单片机原理及接口技术[M].北京:北京航空航天大学出版社,2009:282-284.
[10]陆绮荣.电子测量技术:第2版[M].北京:电子工业出版社,2009:174-176.
