基于DVB-S信号的外辐射源雷达的模糊函数及分辨特性分析
2012-10-03吕晓德向茂生
金 威 吕晓德 向茂生
①(中国科学院电子学研究所微波成像技术国家重点实验室 北京 100190)
②(中国科学院研究生院 北京 100049)
1 引言
外辐射源雷达系统是利用第三方发射的电磁信号,如广播、电视、卫星信号等民用机会照射源或者己方、敌方的非合作雷达来探测、跟踪目标的双(多)基地雷达系统[1],由于其收发分置,并且自身不发射电磁波,因而具有很强的“四抗”能力,近年来,基于外辐射源的雷达系统发展非常迅速[2]。目前已有的外辐射源系统主要是利用位于地面的辐射源[3],而对于机载、舰载等远离地面辐射源的接收平台,由于受到与地面辐射源之间的距离限制,是无法有效的利用此类辐射源信号,因此,为了适应不同的环境需求,需要寻找更多的可用信号及外辐射源类型[4],Griffiths和Baker等人对目前可用的外辐射源信号进行了深入的分析研究[5,6]。当前空域中可供利用的外辐射源有很多,包括AM/FM广播电台、电视发射台、微波移动通信基站、数字式广播电台、地面数字电视发射台,以及机载、星载和舰载等机动辐射源,特别是导航卫星、低轨通信卫星、同步轨道通信卫星和电视直播卫星等星载辐射源,由于其远离地面,覆盖范围很广,可以有效解决地基外辐射源雷达系统的覆盖范围不足的缺点。目前,国内外已经开始对此类外辐射源雷达系统进行深入的研究[7],如Cherniakov,Nezlin和Kubik等人利用低轨通信卫星信号作为辐射源,对星载外辐射源的特性进行了探讨[8];德国研制的无源多基地系统以美国的GPS、俄罗斯的GLONASS卫星信号作为辐射源,对目标进行探测和跟踪[9];英国的 Griffiths等人开展了以马可波罗1号卫星上的电视信号作为辐射源的雷达系统的研究等。
与低轨通信卫星和 GPS等卫星信号相比,DVB-S (Digital Video Broadcasting-Satellite)信号的带宽较宽,发射功率较高,每颗卫星上包含了多个转发器,可供利用的辐射资源较多,并且卫星位于地球同步轨道,不存在由于卫星与地球之间的相对运动产生的杂波多普勒,因此,基于DVB-S信号的外辐射源雷达具有很大的发展潜力,吸引了越来越多的关注。Marques等人对此类外辐射源雷达系统的结构、参数以及试验进行了详细的介绍[10],但是没有对DVB-S信号的模糊函数进行分析。鉴于目前国内外对此类外辐射源的研究还不是很充分,本文从 DVB-S信号的特性和外辐射源的双基几何结构出发,深入分析了以DVB-S信号作为外辐射源的无源雷达的模糊函数,并在此基础上进一步分析了系统的分辨率特性与双基地几何位置之间的关系,分析结果表明 DVB-S信号是一种比较理想的可以作为外辐射源的雷达信号。
2 系统构成
2.1 DVB-S信号模型
DVB-S是符合欧洲电信标准,为了满足各种卫星转发器的带宽及卫星信号的传输特点,采用11/12 GHz卫星频段进行传输,适用于卫星链路的数字电视标准。采用该标准的数字卫星电视系统的发射端由两部分组成,即MPEG-2源编码和复用部分及卫星信道适配器部分,完成了从传送复用器输出的数据码流到卫星射频传输信号的转换[11],其系统功能框图如图1所示。

图1 DVB-S系统的功能框图
如图所示,MPEG-2源编码和复用部分先在节目复用器中对音频和视频进行复用,将视频、音频以及数据放入固定长度的MPEG-2传输流中,再利用传送复用器将数字电视节目进行传输复用。卫星信道适配器部分包括复用适配和能量扩散、外层RS编码、卷积交织、内层卷积码、基带成形以及QPSK调制。在DVB-S系统中,复用适配和能量扩散将每8个传送复用器输出的MPEG-2传送复用包形成一个超帧,再对同步字节取反,然后将数据进行随机化处理。随机化处理后的数据再进行前向纠错,前向纠错分为3层,即外层RS编码、中间层卷积交织和内层卷积码,前向纠错的目的是为了提高数据传输的可靠性。在QPSK调制之前,需要对前向纠错编码的输出进行滚降系数α为0.35的平方根升余弦滚降滤波,即基带成形,使得调制之后的信号适合在卫星信道中进行传输。最后对信号进行 QPSK调制,调制之后的数据经上变频到射频进行传输。同时,为了保证传输过程中的低误码率,信号在传输过程中要有很强的抗干扰能力,信号的各个码元相位之间要尽量独立同分布,即具有噪声的性质,其频谱的分布比较均匀,平均功率谱密度为相对于两路2PSK信号平均功率谱密度的线性叠加,具有更高的频谱利用率。
DVB-S的传输方式分为单路单载波(Single Channel Per Carrier,SCPC)方式和多路单载波(Multiple Channel Per Carrier,MCPC)方式,前者的最大带宽为7 MHz,后者的最大带宽包括36 MHz,54 MHz,72 MHz等几种,从最佳距离分辨的角度考虑,应当选择MCPC方式的DVB-S信号。由于DVB-S信号具有覆盖范围广、传播距离远、带宽较宽、高效、频道多、不受地理条件限制等优点,因此,得到了广泛的应用和发展,我国于1996年颁布广播电视数字传输技术体制,将DVB-S作为数字卫星广播的标准。
2.2 系统的几何结构
本文的研究是基于 DVB-S信号的外辐射源雷达系统,是利用DVB-S信号作为辐射源,接收机由接收卫星电视直达波信号和接收卫星散射信号的两个通道组成,直达通道的天线指向天顶,可以抑制地面产生的多路径效应,回波通道的天线倾斜指向目标,用于获取目标的回波信号,将接收到的直达波信号与目标回波信号进行2维相关处理,从而实现对目标的判别和两路信号的时延差及多普勒测量。由发射站T、接收站R和运动目标P构成的系统双基地雷达平面的几何结构图如图2所示[12]。

图2 DVB-S雷达系统的几何结构图
图中,RT和RR分别表示目标到发射站和接收站之间的距离,θT是发射角,L为基线长度,β为双基角,v为目标的运动速度,φ为目标运动方向与双基角平分线之间的夹角,θR为目标观测角,是与基线L法线方向的夹角,顺时针为正,逆时针为负。
信号从发射站经过目标散射后到达接收站的距离和R可以表示为

当发射站和接收站都静止时,目标距离和R的变化率为

式中,dRT/dt,dRR/dt分别表示目标相对于发射站和接收站的距离变化率,vr为目标的速度在双基地平面上相对于双基角平分线的投影。
根据图2的几何关系,可以得到双基角β的余弦值为

则目标的瞬时距离和R(t)可以表示为

根据上式,可以得到目标回波信号的时延τ(RR,θR)为

目标多普勒频率 fd(RR,vr,θR)为

式中,λ为发射信号波长。从式(5)和式(6)中可以看出,目标回波信号的时延和多普勒频率是关于目标几何位置(RR,θR)的函数,随着目标位置的变化,回波信号的时延和多普勒频率也会随之相应变化。
3 DVB-S信号模糊函数
模糊函数是由雷达发射波形和滤波器特性决定,通过对两个目标的距离差和速度差为参数进行分析,描述了整个雷达系统所具有的目标分辨率、模糊度、测量精度和杂波抑制的能力,是分析研究雷达信号的有效工具。
DVB-S信号可以表示为

式中,f0为载波频率,u(t)为 DVB-S信号 QPSK(Quadrature Phase Shift Keying)调制的复包络,表达式如下:

式中,A为信号幅度,ak=0,1,2,3,p(⋅)为子脉冲函数,Ts为符号宽度。DVB-S信号对应的模糊函数图如图3所示。
从图中可以看出,DVB-S信号具有“图钉状”的模糊函数,其距离和频率的分辨率可以分别由信号的等效带宽和积累时间确定。信号所占的频带越宽,对距离的分辨性能越高;信号的积累时间越长,模糊函数在频域上的宽度越窄,对频率的分辨性能越高。

图3 DVB-S信号的模糊函数图
由于外辐射源雷达属于双(多)基雷达系统,因此,对于目标信号的分析需要考虑系统空间几何特性的影响。假定目标1和目标2在双基地雷达平面内分别位于(RR,vr,θR)和(RR+δ,vr+ξ,θR),则目标1的回波信号可以表示为

两个目标的回波信号多普勒频差fd为

利用均方差准则,对不同距离、不同速度的两个目标在时宽T上进行分辨,两个目标之间的差别越大,则均方差2ε越大,越容易分辨,如下式所示:

式中,T=NTs表示信号的时宽,Ts为符号宽度,N为符号个数,dt 为信号在时间T内的能量,τ为信号时延差,fd为信号多普勒频差,R(τ)为DVB-S信号复包络u(t)的相关函数,χ (τ,fd)为模糊函数,即

从式(18)中可以看出,信号的模糊函数可以近似为u(t)的相关函数R(τ)与一个关于fd的sinc函数的乘积。由于u(t)为平稳随机过程,对其相关函数 R(τ)的求解,可以通过先求u(t)的谱密度函数,再利用傅氏反变换得到信号的相关函数。
令ck=exp {j(π/4+(π/2)ak)},其中,ak=0,1,2,3,则ck的相位码元在{π/4,3π/4,5π/4,7π/4}之中等概率分布,并且相互独立,因此,可以得到ck的相关函数为

对 Rc(k,m)进行傅里叶变换,可以得到ck的谱密度函数 Gc(f)为

令h(t)=p(t/Ts),对其进行傅里叶变换,可以得到

则u(t)的谱密度函数 Gs(f)可以表示为
对 Gs(f)进行傅里叶反变换,可以得到u(t)的相关函数 R(τ)为

将 R(τ)带入式(18),可以得到 u(t)的模糊函数χ(τ,fd)为

式中,τ为信号时延差,fd为信号多普勒频差。从式(24)的模糊函数表达式中可以看出,与单基地雷达系统不同,DVB-S信号的模糊函数与外辐射源雷达系统的双基地几何位置有关,是以目标的位置参数作为参变量,当目标的位置发生改变时,信号的模糊函数也会相应地改变,因此,对此类系统雷达信号的模糊函数的分析除了要考虑信号本身的特点外,还需要考虑目标位置参数的影响。
根据式(24)得到的DVB-S外辐射源雷达系统的模糊函数表达式,对DVB-S信号的归一化模糊函数图进行仿真,以位于110.5°E的Sinosat-1直播卫星上的中国教育电视台信号为例,信号载频为 12622 MHz,符号率为 32.553 MS/s,设初始时刻的目标参 数 为 RR=50 k m,vr=500 m/s,θR分 别 为 30°,−30°和−89°。仿真结果如图4-图6所示。

图4 θR=30°模糊函数图

图5 θR=−3 0°模糊函数图
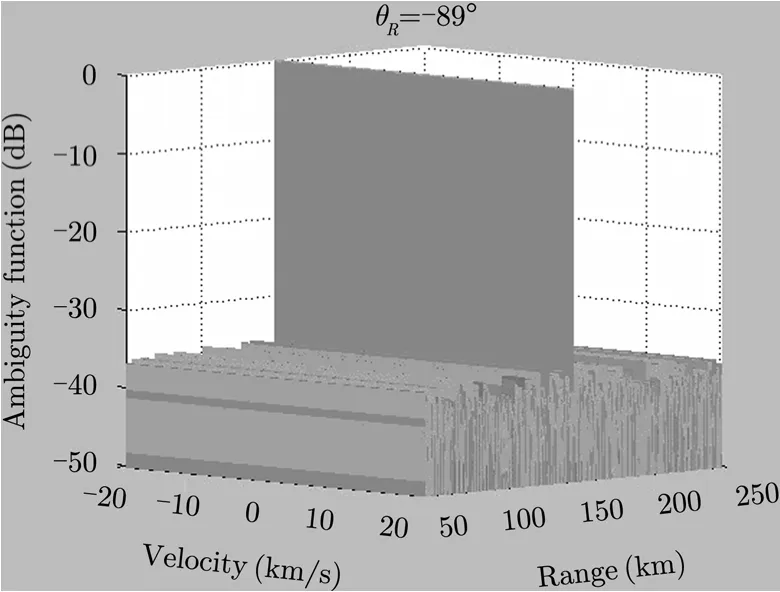
图6 θR=−8 9°模糊函数图
从图4和图5中可以看出,DVB-S信号具有典型的“图钉状”模糊函数,即信号具有类似噪声的性质,并且其模糊函数的副峰幅度非常小,其归一化幅度为−60 dB左右,因此,该副峰对目标检测性能的影响很小。同时,由于外辐射源雷达系统属于双基地雷达系统,与单基地雷达相比,目标回波信号的时延和多普勒频率与双基地的几何配置有关,当目标的位置发生变化时,其模糊函数也会发生相应的变化,随着目标靠近基线,模糊函数将被展宽,如图6所示,系统的分辨率也将随之降低,当目标位于基线上时,系统将失掉分辨能力。
4 分辨特性分析
4.1 距离分辨率
双基地雷达的距离分辨率表示双基地雷达能够分辨的两个目标之间的最小距离间隔,即对速度相同的两个目标在距离上的分辨能力。因此,将ξ=0带入多普勒频差fd的表达式中,得到fd=0,带入式(24),可以得到DVB-S信号沿fd=0的模糊函数为


图7 DVB-S信号沿fd=0的模糊函数
图7仿真了当时间T为1 ms时,DVB-S信号的归一化距离模糊函数 χ(τ,0),从图中可以看出当τ=0时,相关输出最大值,也是均方差 ε2的最小点,此时两个目标在距离上是没有差别的。χ(τ,0)越小,则两个目标回波信号的均方差 ε2越大,越容易从距离上分辨。通常相邻目标的距离分辨能力是以距离模糊函数 χ(τ,0)的波形主瓣3 dB宽度来表示,即

从式(29)中可以看出,DVB-S外辐射源雷达系统的距离分辨率δR与信号的带宽B和双基角β有关。分辨性能与双基地的几何位置有关,随着目标逐渐靠近基线,距离分辨能力也随之逐渐降低,当目标位于基线上时,即β=180°,此时距离分辨率将趋于无穷大;当目标远离基线时,即β逐渐变小,雷达系统的距离分辨率随之变高,当β=0°时,此时雷达系统的距离分辨率为 δR≈C/(2B),为单基地雷达系统的距离分辨率。
4.2 速度分辨率
双基地雷达的速度分辨率是双基地雷达能够分辨的两个目标的最小速度间隔,即对处于同一位置的两个目标在速度上的分辨能力。因此,将δ=0带入时延差τ的表达式,得到 τ=0,带入式(24),可以得到DVB-S信号沿τ=0的模糊函数为

图8仿真了当时间T为1 ms时,DVB-S信号的归一化速度模糊函数 χ(0,fd),从图中可以看出当fd=0时,匹配滤波器输出最大值,也是均方差 ε2的最小点,此时两个目标在径向速度上是没有差别的。χ(0,fd)越小,则两个目标回波信号的均方差 ε2越大,越容易从速度上分辨。通常相邻目标的速度分辨能力是以速度模糊函数 χ(0,fd)的波形主瓣3 dB宽度来表示,即

将多普勒频差fd的表达式带入上式,可以得到:
则可以得到速度分辨率δv为

从式(33)中可以看出,随着时间T的增加,模糊函数在频域上的宽度也越来越窄,系统对多普勒频率的分辨能力越来越高,从而速度分辨率越高。此类外辐射源雷达系统的速度分辨率δv与发射信号的波长λ、时间T和双基角β有关。分辨性能与双基地的几何位置有关,随着目标逐渐靠近基线,速度分辨能力也随之逐渐降低,当目标位于基线上时,即β=180°,此时速度分辨率将趋于无穷大;当目标远离基线时,即β逐渐变小,雷达系统的速度分辨率随之变高,当β=0°时,此时雷达系统的速度分辨率为 δv≈λ/(2T),为单基地雷达系统速度分辨率。从公式中可以看出,对于此类体制的雷达系统,可以通过提高接收时长来提高系统的频率分辨率,从而提高速度分辨率。
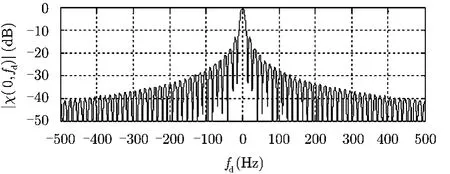
图8 DVB-S信号沿τ=0的模糊函数
5 结束语
与地基外辐射源雷达系统相比,利用DVB-S信号作为外辐射源信号的无源雷达系统的覆盖范围更广,几何配置更加灵活,接收站可以装载在飞机、轮船等运动平台上,并且信号带宽更宽,具有“图钉状”的模糊函数,是一种比较理想的外辐射源信号。本文的研究是针对以DVB-S信号作为外辐射源的无源雷达系统,文中将发射信号本身的特性与双基地雷达系统的几何配置相结合,对信号的模糊函数进行了深入的研究,并进一步分析了由于信号本身以及双基地几何配置对目标分辨性能的影响,为利用 DVB-S信号作为外辐射源信号的无源雷达系统的分析模型和性能研究提供了一定的理论参考。
[1]Kuschel H and O’ Hagan D.Passive radar from history to future[C].International Radar Symposium (IRS),Vilnius,Lithuania,June 16-18,2010: 1-4.
[2]万显荣.基于低频段数字广播电视信号的外辐射源雷达发展现状与趋势[J].雷达学报,2012,1(2): 109-123.Wang Xian-rong.An overview on development of passive radar based on the low frequency band digital broadcasting and TV signals [J].Journal of Radars,2012,1(2): 109-123.
[3]Olsen K E and Woodbridge K.Analysis of the performance of a multiband passive bistatic radar processing scheme[C].Wave Diversity and Design Conference,Niagara Falls,ON,2010: 142-149.
[4]Hoyuela C M,Terzuoli A J,Jr.,nd Wasky R P.Determining possible receiver locations for passive radar[J].IEE Proceedings-Radar,Sonar and Navigation,2005,152(3):206-214.
[5]Griffiths H D and Baker C J.Passive coherent location radar systems.Part 1: performance prediction [J].IEE Proceedings-Radar,Sonar and Navigation,2005,152(3): 153-159.
[6]Baker C J,Griffiths H D,and Papoutsis I.Passive coherent location radar systems.Part 2: waveform properties [J].IEE Proceedings-Radar,Sonar and Navigation,2005,152(3):160-168.
[7]杨进佩,刘中,朱晓华.用于无源雷达的 GPS卫星信号性能分析[J].电子与信息学报,2007,29(5): 1083-1086.Yang Jin-pei,Liu Zhong,and Zhu Xiao-hua.The performance analysis of GPS signals for passive radar[J].Journal of Electronics & Information Technology,2007,29(5):1083-1086.
[8]Cherniakov M,Nezlin D,and Kubik K.Air target detection via bistatic radar based on LEOS communication signals[J].IEE Proceedings-Radar,Sonar and Navigation,,2002,149(1):33-38.
[9]Ringer M A,Frazer G J,Anderson S J,et al..Waveform analysis of transmitters of opportunity for passive radar.US Defence Science & Technology Organisation TR-0809,1999:1-59.
[10]Marques P,Ferreira A,Fortes F,et al..A pedagogical passive RADAR using DVB-S signals[C].Synthetic Aperture Radar(APSAR),Seoul,2011: 1-4.
[11]EN 300421 V1.1.2,Digital Video Broadcasting (DVB);Framing structure,channel coding and modulation for 11/12 GHz satellite services[S].European Telecommunications Standards Institute,1997.
[12]Stinco P,Greco M S,Gini F,et al..Ambiguity function and Cramer–Rao bounds for universal mobile telecommunications system-based passive coherent location systems[J].IET Radar,Sonar & Navigation,2012,6(7): 668-678.
