开关磁阻电机调速系统非线性仿真研究
2012-09-25熊春宇王艳芹
熊春宇,王艳芹,林 芳
(大庆师范学院 物理与电气信息工程学院,黑龙江 大庆 163712)
0 引言
开关磁阻电机调速系统是一种新型的调速系统,它综合了直流电机调速系统和交流电机调速系统的部分优点,具有较好的应用前景。在开关磁阻电机调速系统中,功率变换器占有很重要的位置,它是能量转换模块,为电机的绕组供电。由于开关磁阻电机只有单方向的电流,因此功率变换器的结构形式简单,与其它电机相比,功率变换器的成本也要低得多。而且,电机运行的效率和安全性能也与功率变换器紧密相关。电机各相的导通时间、以及相电流的值都是由功率变换器决定的,它能够直接接收控制器传来的控制信号,对功率开关器件进行触发,按照一定顺序决定哪相绕组导通,作为电机的供电电源,需要可靠换向,而且还应为电机能量回馈提供条件[1]。
通常情况下,开关磁阻电机的相电流并不是规则的正弦波形,它由电动机自身的结构参数以及系统的工作情况决定,因此在功率器件的选择上存在一定的困难,在节省成本的同时,功率器件一定要能保证系统可靠地运行,以免损坏电机及功率变换器。功率变换器的好坏能够影响整个调速系统的性能好坏,功率变换器的设计是整个开关磁阻电机调速系统设计的重点。合理地设计功率变换器是提高整个SRD性能价格比的关键之一。开关磁阻电机调速系统是典型的机电一体化系统,因此,功率变换器的设计还要同时考虑开关磁阻电机和控制器等,以使整个系统的成本最低,性能最优。
1 功率变换器的结构
功率变换器的拓扑结构随着使用条件的不同也具有不同的结构,典型的拓扑结构有以下四种:①电路中含有公用功率开关器件的功率变换器;②分裂式功率变换器;③开关型功率变换器;④不对称半桥结构的功率变换器。
本文采用的功率变换器为不对称半桥结构的功率变换器。如图1所示,每相绕组各对应两只功率开关管和两个续流二极管,上下两只功率开关管必须同时开通或关断,两只续流二极管构成能量回馈通路。尽管该种方式所用功率开关器件较多,但是它运行可靠,而且还具有以下优点:功率开关器件各相没有公共管,因此各相电流也是相互独立的,分别由各个相的电压来控制;且在二极管续流阶段由于电压为零,可以避免开关管的反复通断,增大电动转矩,减少能量损耗,转矩脉动小,噪声得到有效抑制。
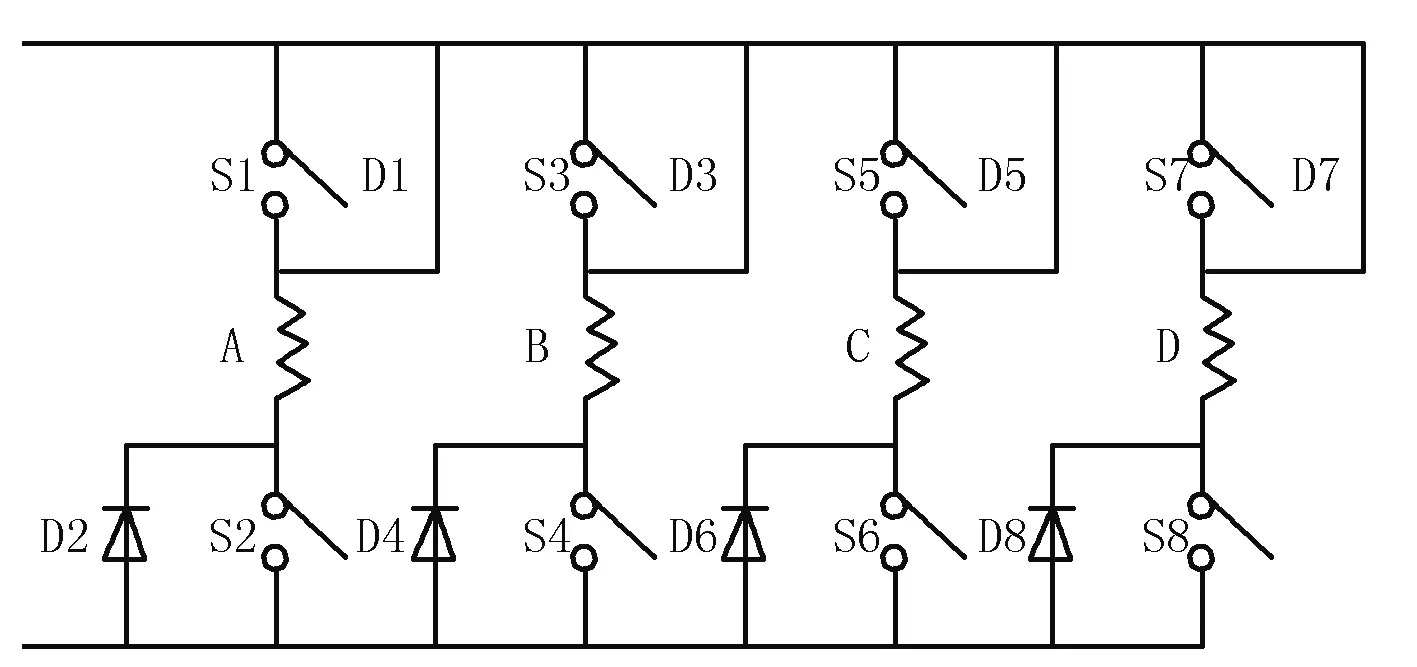
图1 不对称半桥结构的功率变换器
2 功率开关器件的选择
功率开关器件的选择也是整个功率变换器设计的一个重要环节,选择的依据是由开关磁阻电机实际运行需要来决定的,具体涉及到额定电压、容量、能耗以及设计成本等因素。为了保证开关磁阻电机调速系统能够安全可靠地运行,在确定电机所需电压和电流等级之后,要保证开关管可以允许通过更大的电压和电流值,以免损坏元件。另外,开关管本身的安全系数也应考虑在内[2]。经过对比分析,采用的功率器件是绝缘栅双极型晶体管IGBT。
绝缘栅双极型晶体管(IGBT)是一种新型全控型器件,由复合而成,该器件综合了MOSFET和GTR的众多优点,像MOSFET的输入电阻大,驱动容易,响应快,动作频率高,且拥有GTR的许多优点,如通态压降小,能承受较大的电压和电流等。而且IGBT的功耗小,成本也较低,是比较理想的功率开关器件。
3 开关磁阻电机非线性数学模型
建立开关磁阻电机仿真模型之前,需要掌握和理解电机的数学模型。对电机作如下假设:主电路电源电压保持恒定;功率开关器件的动作无过渡,认为是理想器件;忽略铁耗;电机各相对称,每相两个线圈正向串联,不考虑相间互感;在一个电流脉动周期内转速恒定[3]。功率变换器件采用不对称半桥结构,则开关磁阻电机的非线性电路方程可表示为:
当上下两开关管同时导通时,有
(1)
其中,Us为电源电压;i为电流;Rs为每相绕组电阻;Ut为主开关管导通压降。
从而得出相电流值为
(2)
其中Ud为二极管导通压降。
当上下两开关管同时关断时,呈现续流状态,能量回馈,此时有
(3)
由式(3)进一步得到关断时的相电流为[4]
(4)
当开关磁阻电机的A相单独导通时,磁场能量为
(5)

(6)
当定转子角不为零时,发生机电能量转换后,电磁转矩为
(7)
以磁共能对转角的偏导数进行计算,电磁转矩的数学约束条件为i=const,方向是趋于磁共能增加的方向ψ=const,或者i=const仅仅是计算上的约束条件,并不表示只有在该条件下才能产生电磁转矩[5]。
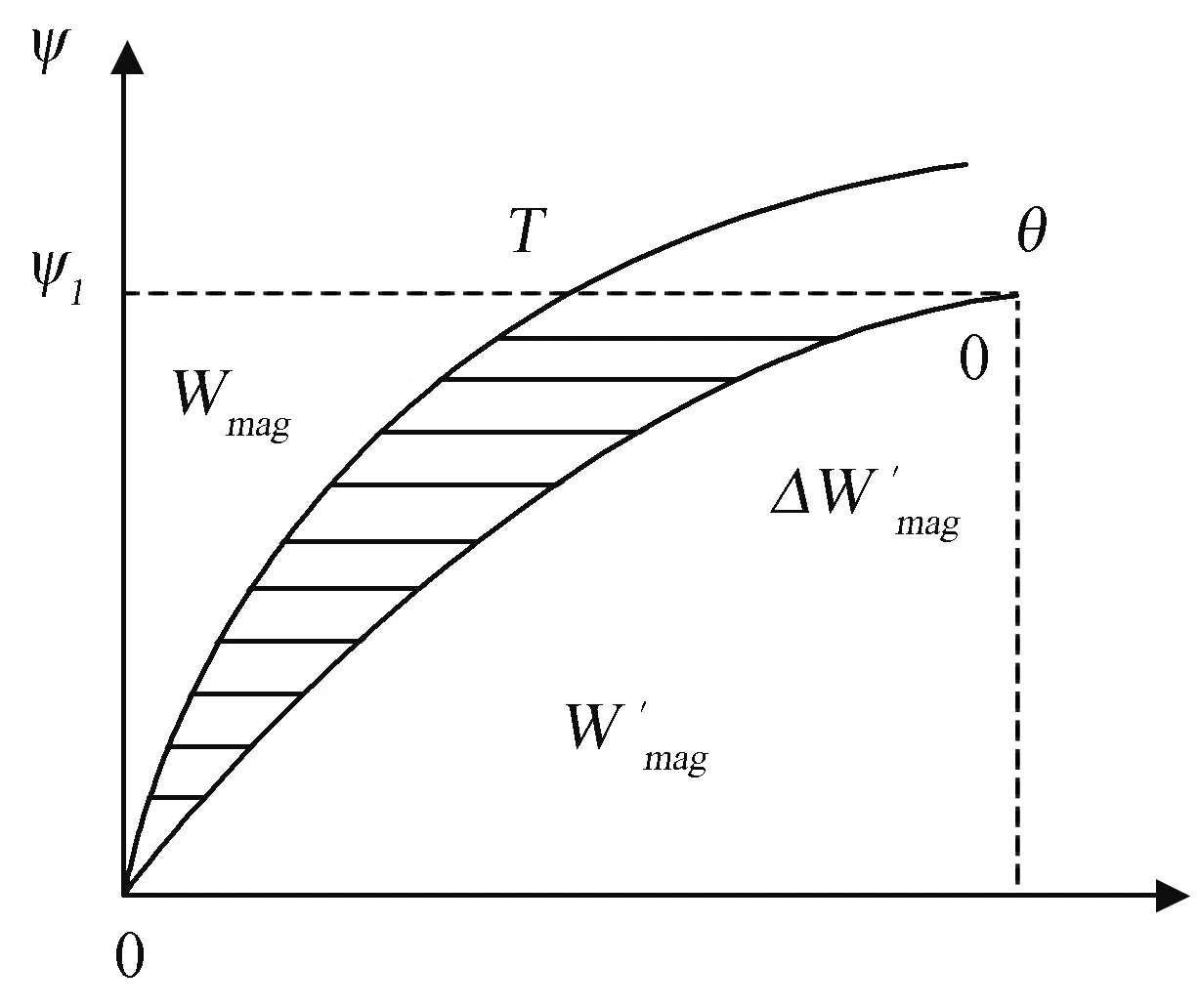
图2 磁能、磁共能与电流的关系
4 有限元分析与非线性仿真的结合
根据电机样机参数,利用有限元分析软件ANSYS对样机进行建模、剖分、加载、求解后,最终将所得数据进行线性插值[6],得到如图3所示的三维磁化曲线族,即ψ-θ-i曲线。由图3可以看出,当电机定转子极未对齐,且电流较小时,绕组的磁链值也很小;随着电流的增大,磁链也随之增大,最后达到饱和,这与理论分析是一致的。
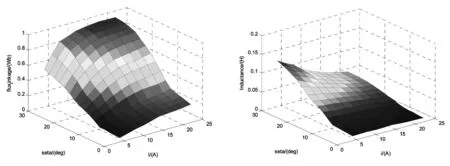
图3 磁链特性曲线 图4 电感特性曲线



图5 转矩特性曲线
非线性磁化曲线族是分析开关磁阻电机电磁场非常重要的参数,也是进行电机各种性能分析的基础。为了使仿真的结果更加准确可靠,在用MATLAB搭建电机的仿真模型过程中,将验证过的有限元分析数据与电机的仿真相结合,通过插值模块将ANSYS有限元分析与MATLAB/SIMULINK联系起来,使非线性仿真更加合理。
5 开关磁阻电机仿真模型的建立
目前,对开关磁阻电机的仿真研究主要采用线性、准线性以及基于近似模型的非线性研究,适用范围都有一定的局限性,而且由于简化使得结果不够精确。
本文针对开关磁阻电机内部磁场非线性特点,并结合有限元分析所计算出的磁化曲线,利用MATLAB对开关磁阻电机进行仿真建模,验证电机的性能。依据电机的基本方程以及电机的控制方式,在SIMULINK中构建3kW四相8/6极开关磁阻电机系统的仿真模型,其整体模型如图6所示,采用电流、角度双闭环的形式。
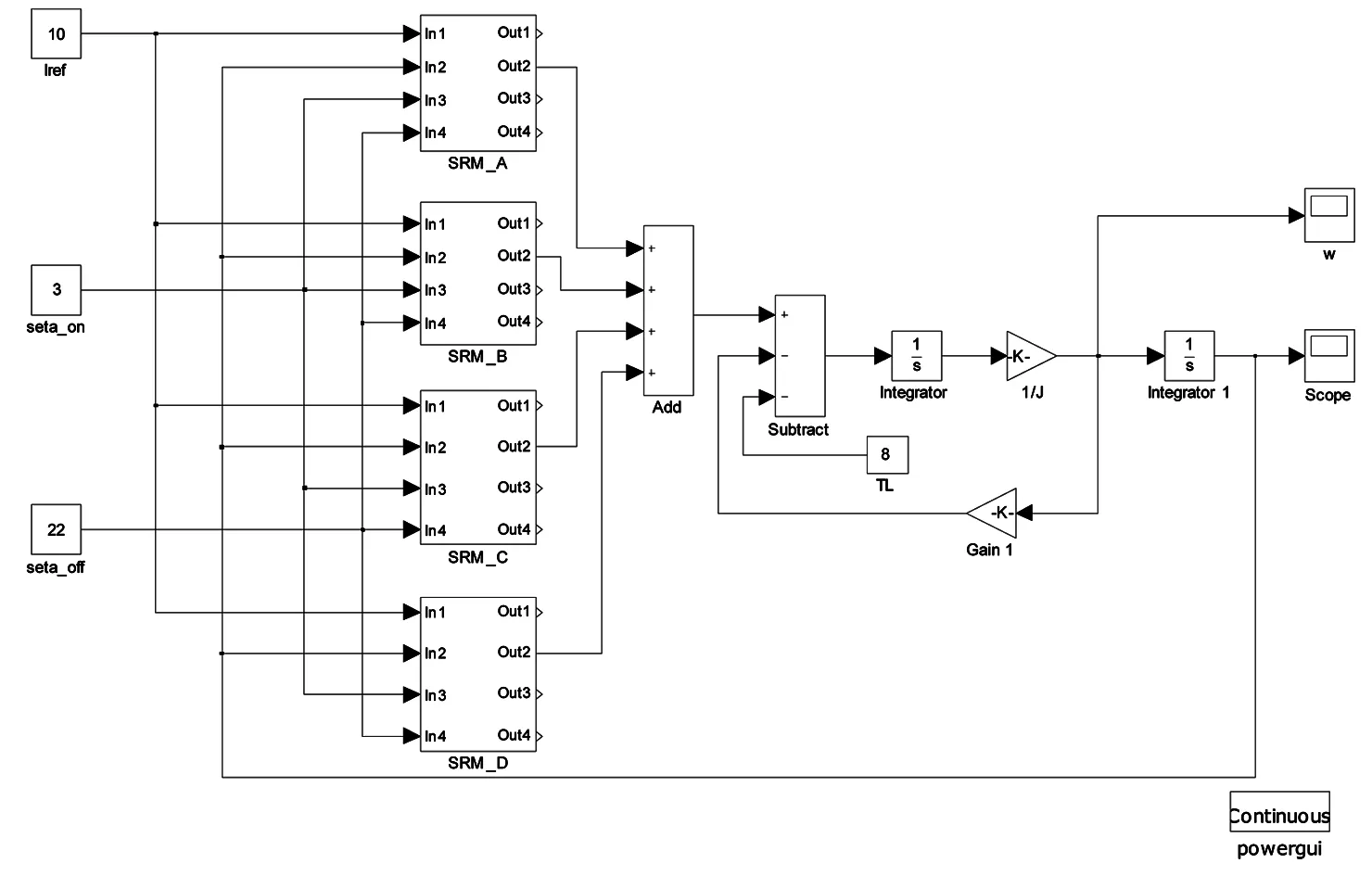
图6 开关磁阻电机非线性仿真模型
给定参考电流值为10,负载转矩值为8,其一相电机模型如图7所示。在求取磁链的模块中,直接将有限元分析所得到的电流和转矩值作为输入,磁链作为输出,简化了磁链计算过程,也减少了操作误差。
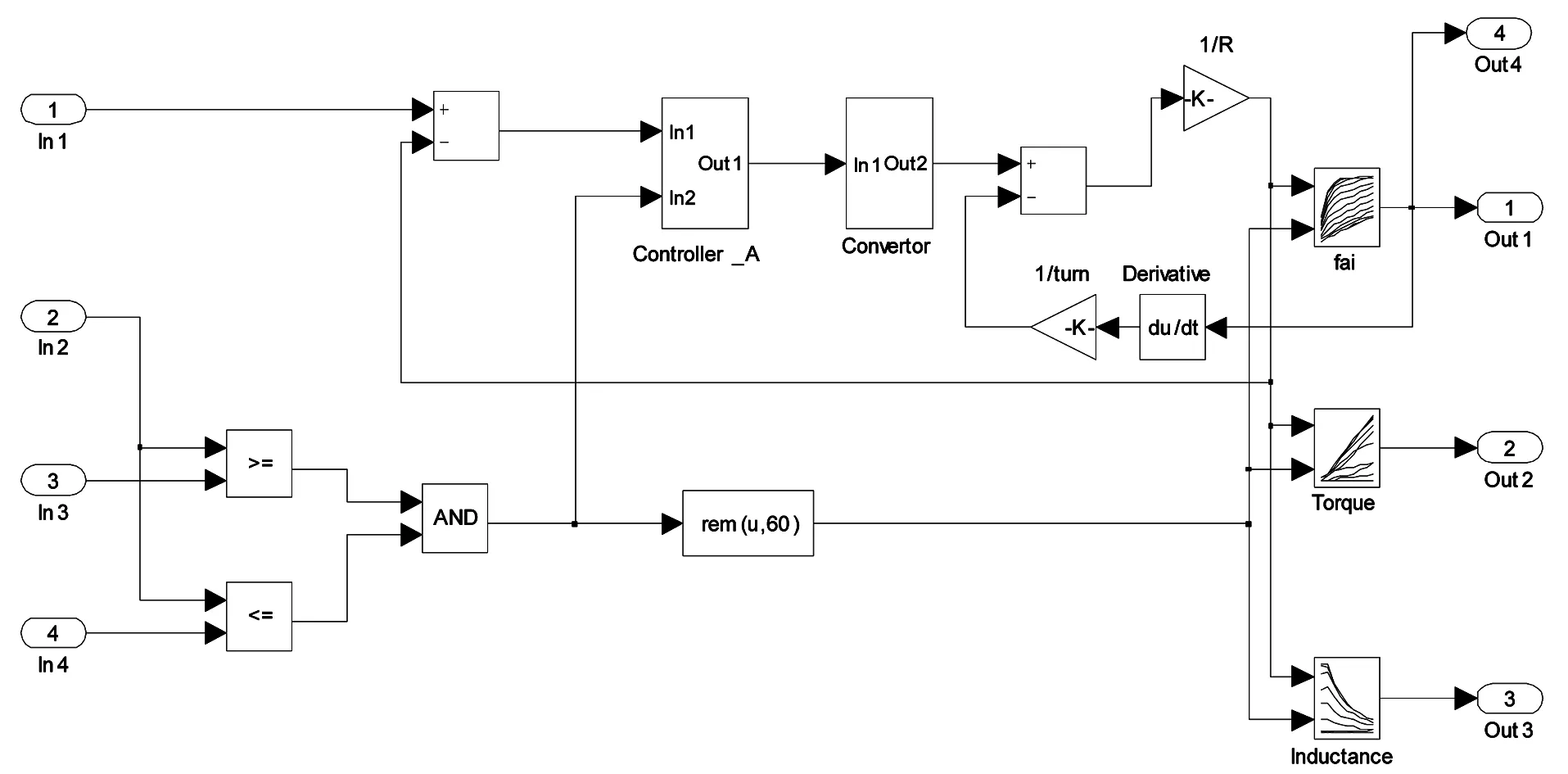
图7 开关磁阻电机一相绕组模型
6 仿真结果分析
开关磁阻电机仿真参数包括:给定电流Iref=10A;电阻R=1.3Ω;直流电压150V;转动惯量J=0.0013kg·m2;摩擦系数f=0.0183;负载转矩TL=8N·m;θon=3°,θoff=22°。仿真时间设定为0.2s,采用ode23tb方式。电流斩波控制方式是固定开通角和关断角,利用主开关器件的多次导通和关断将电流限制在给定的上、下限之间,并产生电磁转矩。转速波形如图8所示,可见系统起动过程较快,并能迅速达到稳定,超调小,且运行平稳。尽管转矩有一定脉动,但是整个系统在电流斩波控制方式下调速效果较好,能体现出电机低速运行时良好的调速性能。
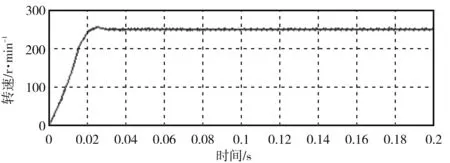
图8 电流斩波控制方式转速波形
当电机高速运行时,采用角度位置控制方式,通过改变开通角或关断角的值,来调节电机的转矩和转速。给定电源电压为280V,采用固定关断角,改变开通角的方式。图9给出角度位置控制方式控制下的转速波形,在较短的起动时间后,电机达到了稳定速度,响应速度较快,无过渡时间,比电流斩波控制响应更快。
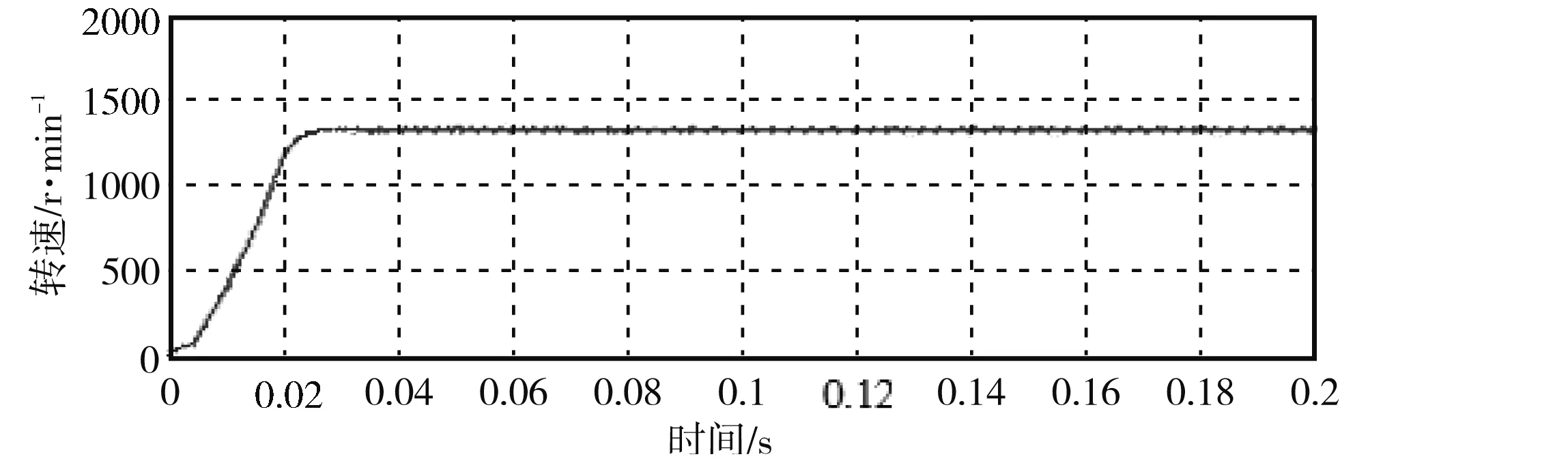
图9 角度位置控制方式转速波形
综上所述,本文将有限元法计算的结果用于开关磁阻电机的非线性调速仿真这个方案是可行的,系统能够体现出很好的调速性能。无论是电流斩波控制方式还是角度位置控制方式,转速都能较快地达到稳定状态,转速响应快。并且在合理的参数设定下,该非线性系统能够实现较宽范围内的调速,体现出了开关磁阻电机调速范围宽这一优点。
7 调速系统的动态性能
对于一个良好的调速系统,只有较好的稳态性能是不够的,系统动态性能的好坏也是研究的一个重点。本文分别针对不同负载和负载突变两种情况进行系统动态性能的分析。
图10给出在电流斩波控制方式下,负载分别为空载、TL=2N·m、TL=8N·m时的起动情况。由图可以看出,在不同负载条件下,系统均能够较快地达到稳定状态,且超调小,响应时间短,速度平稳。
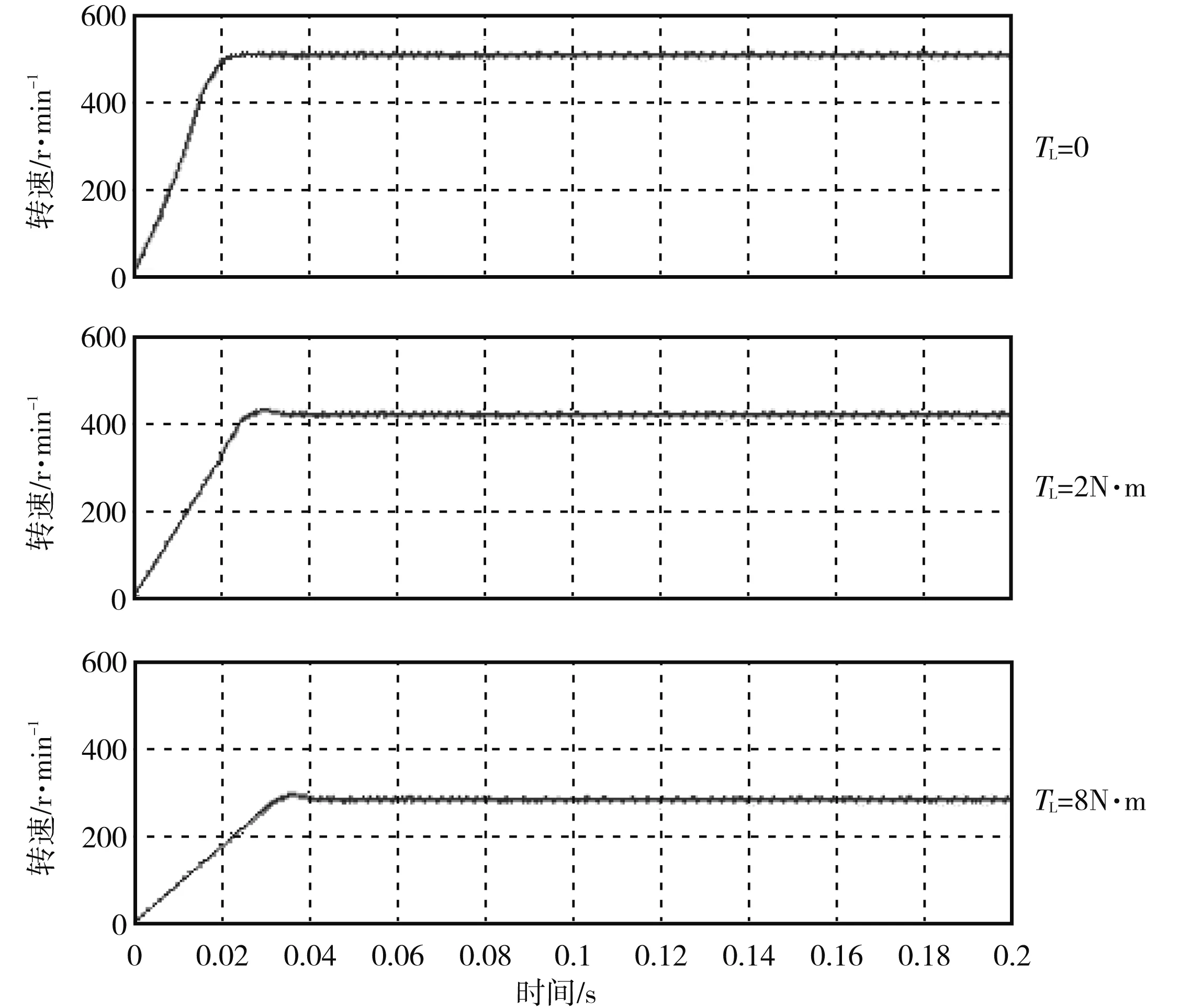
图10 负载不同时的转速响应曲线
系统运行在稳定状态时,在0.1秒增加TL=1N·m的负载,0.14秒去掉TL=1N·m的负载,转速波形如图11所示。可见,在突加负载时,转速只经过轻微的扰动后,便回到稳定状态;在突减负载时,转速也只有微小的上升,便迅速回到稳定转速。
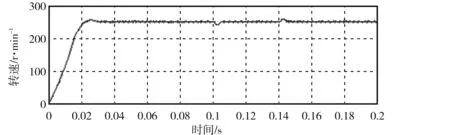
图11 突加负载和突减负载时的转速相应曲线
综上可知,在不同负载条件下起动,系统都能够迅速地达到稳定转速,且超调小。当系统受到负载扰动时,也能较快地恢复到原来的速度。因此,本文所研究的开关磁阻电机调速系统具有较好的动态性能,起动性能好,抗干扰能力强。
8 结语
本文给出了开关磁阻电机的非线性数学模型,并利用MATLAB自带模块将ANSYS有限元分析与非线性系统仿真有机地结合起来,利用SIMULINK强大的建模功能对四相8/6极开关磁阻电机进行了仿真。在电机模型的搭建过程中,采用了一种新的方法,简化了模型的同时,也略去了反演计算,减少了不必要的误差,提高了准确度。采用角度位置控制和电流斩波控制相结合的方式,低速时采用电流斩波控制,高速时采用角度位置控制,仿真后得出转速曲线。在系统动态性能的仿真中,分别研究系统在电流斩波控制和角度位置控制下的系统的调速性能,得到不同负载下电机的速度响应曲线。仿真结果表明该系统的抗扰动能力强,在不同负载条件下起动都可以实现很好的调速。
[参考文献]
[1] 杨岳峰,张奕黄.SRM常见的几种功率变换器主电路及原理[J].电机电器技术,2003(2):19-20.
[2] 马春燕,王振民.开关磁阻电机调速系统功率变换器的仿真与研究[J].太原理工大学学报,2006,37(6):696-698.
[3] 周会军,鱼振民,丁文,等.基于Matlab/ Simulink的开关磁阻电动机数字仿真[J].微电机,2006,39(6):4-7.
[4] Iqbal Husain, Syed A. Hossain. Modeling, Simulation, and Control of Switched Reluctance Motor Drives [J].IEEE trans on industrial electronics, 2005, 52(6):1625-1634.
[5] 黄操,张奕黄.开关磁阻电机调速系统控制器软件设计研究[J].微电机,2006,39(8):86-88.
[6] BALTHAZAR P, SILVIA no R, COSTA B P J, et al. Obtaining the magnetic characteristics of an 8/6 switched reluctance machine: from FEM analysis to experimental tests[J]. IEEE trans on industrial electronics, 2005,52(6):1635-1643.