自动化监测技术在地铁隧道中的应用
2012-09-22付丽丽叶亚林陈昊程险峰张斌
付丽丽,叶亚林,陈昊,程险峰,张斌
(深圳市勘察研究院有限公司,广东深圳 518026)
1 引言
深圳市“卓越梅林基坑支护工程项目”与正在运营的深圳地铁4号线上民区间毗邻,场地西侧为上民区间隧道,其他侧为临建及待建道路。根据深圳市政府和深圳地铁公司的有关规定,位于地铁周边两侧50 m范围的区域为地铁保护区,保护区内实施基坑开挖支护不得破坏地铁结构及相关构筑物,对地铁的影响必须满足相关规定。
因此,在基坑开挖支护过程中,保护好正在运营的地铁4号线是本基坑工程监测工作的重点。为保证地铁的安全运行,必须在基坑开挖过程中对运行中的隧道变形进行不间断监测。
因在地铁运行期间绝对不允许测量人员进入隧道,为此,须采用远程监控管理、无人值守、连续、自动的动态监测方法,以便随时提供监测数据信息,及时掌握地铁隧道的变化情况,确保地铁的安全运行。
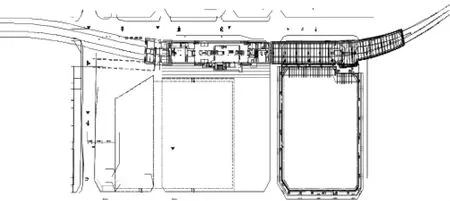
图1 深圳地铁4号线平面图
2 自动化监测系统
自动化监测系统的主要仪器设备如表1所示。
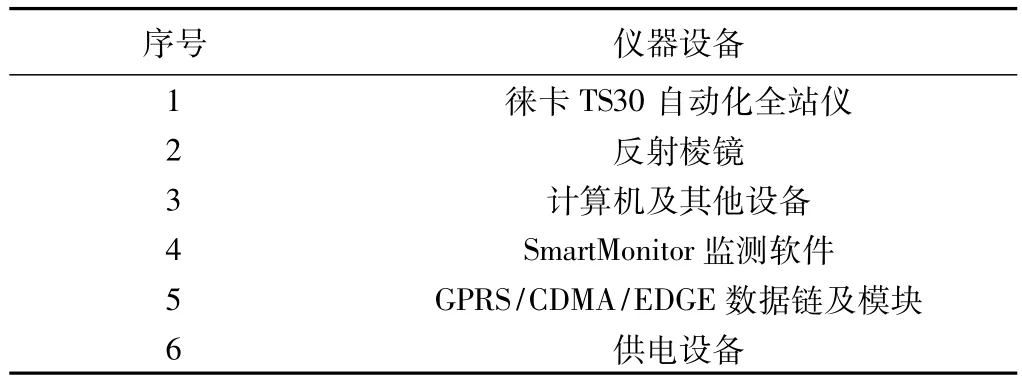
自动化监测系统的主要仪器设备 表1
(1)徕卡TS30全站仪
地铁自动化监测使用仪器为徕卡TS30全站仪,该仪器标称精度为:测距精度±(0.6 mm+1 ppm×D)mm,测角精度0.5″。并可通过专用的SmartMonitor监测软件来控制监测目标及设定监测时间。徕卡TS30自动化全站仪实现了整平、调焦、正倒镜观测、记录观测数据等的全自动化,并且具备自动目标识别与照准(ATR)功能,只需操作人员粗略的瞄准棱镜,TS30全站仪就可以自动搜寻到目标棱镜,并自动瞄准,不再需要人工干预精确瞄准和调焦,这在很大程度上提高了监测的工作效率。

图2 徕卡TS30全站仪
(2)反射棱镜
在地铁隧道内,利用膨胀螺丝将棱镜固定在隧道的道床、拱腰及拱顶,使棱镜反射面指向工作基点,以便徕卡TS30全站仪能自动搜寻锁定作为监测标志的反射棱镜,如图3所示。
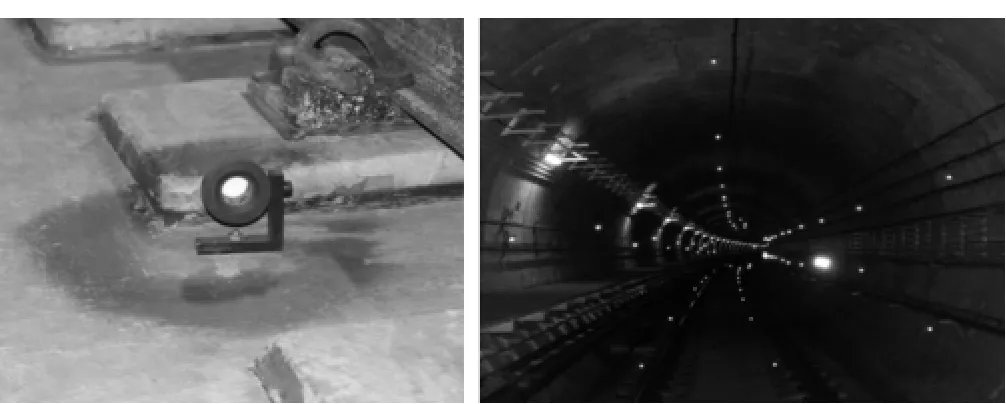
图3 反射棱镜
(3)计算机及其他设备
全站仪与计算机利用GPRS/CDMA/EDGE数据链进行连接,利用专用监测软件以实现自动化监测,其他设备包括连接电缆、外接电源等,进行自动变形监测,自动存储各个观测周期的监测数据,并自动对监测数据进行处理,生成监测报表。

图4 计算机及供电设备
(4)SmartMonitor监测软件
SmartMonitor监测软件是与TS30全站仪配套的专门用于监测的变形测量软件,并将监测数据存储在SQLServer数据库中,它可以按操作者预先设定的测量时间和周期次数进行相应的监测。根据需要也可以添加多个循环,如果是一台仪器测量,那么各个循环之间的时间不能交叉,最好保证一个循环的开始时间在另一个循环的结束时间之后。也可以实时显示图形、三维坐标以及较差。
(5)数据处理及分析
对测量数据进行处理分析,采用的是SmartAnalyzer监测分析软件以及自己编制的软件和武汉大学测绘学院商用平差软件“科傻”系统。在数据处理时对测量数据进行人工干预,删除粗差数据,取平均值作为此时间段测量的最终值,并按施工方要求的格式绘制位移曲线图、制作监测报表,及时汇报隧道的变化情况。

图5 SmartMonitor监测软件

图6 SmartMonitor监测分析软件
3 施工监测
3.1 自动化监测点布置
(1)监测点布置
监测断面是受测处的隧道正交横断面,并在该断面上布置有多个监测点。监测断面尽可能在测量范围内的隧道段中均匀分布。本项目根据设计图纸,被监测地铁隧道长约500 m,每10 m一个监测断面,设计监测28个监测断面。每个断面布置5个监测点,包括1个拱顶沉降监测点、2个道床沉降观测点和2个拱腰沉降及水平位移监测点。自动化监测断面布置如图7、图8所示。
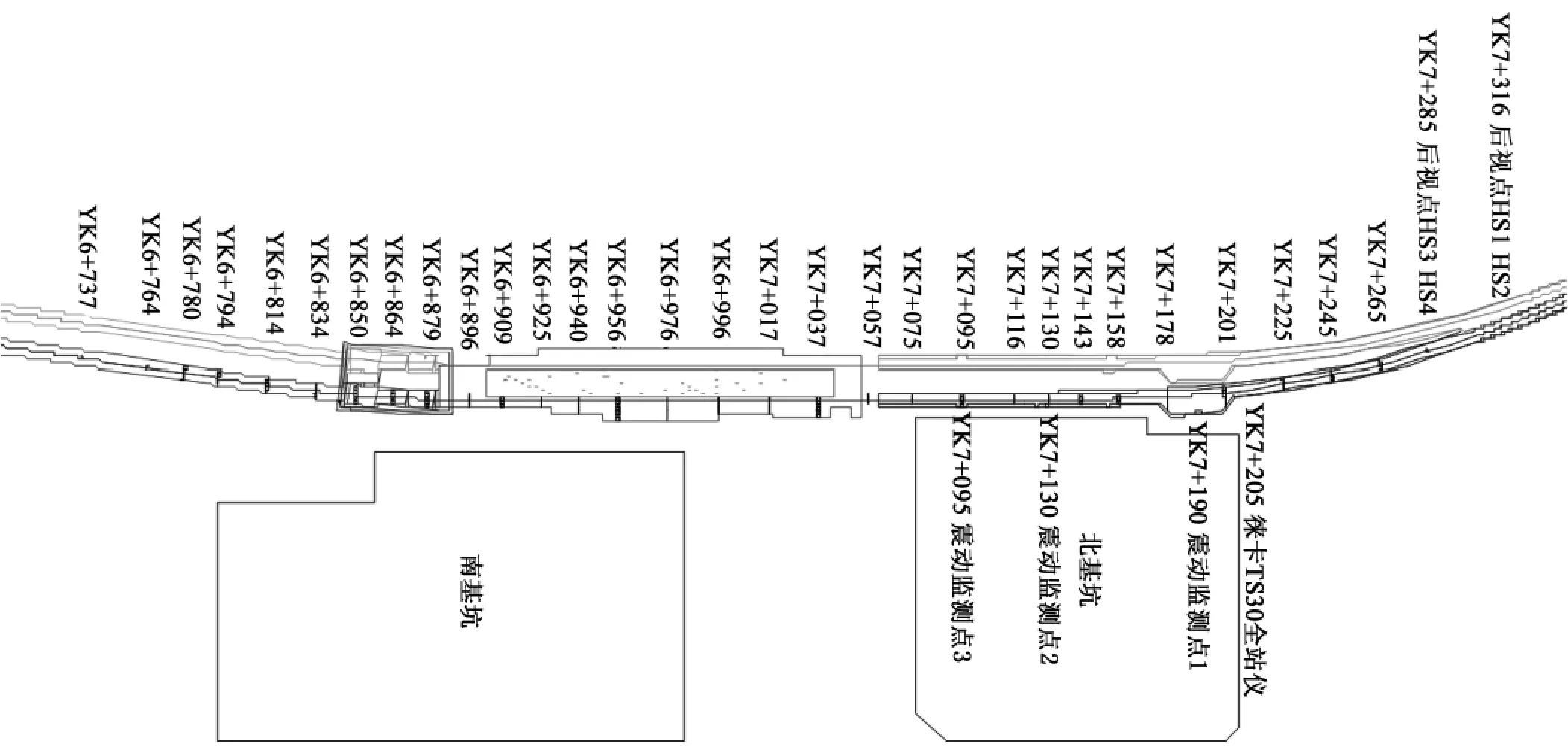
图7 基坑地铁隧道自动化监测断面布置示意图
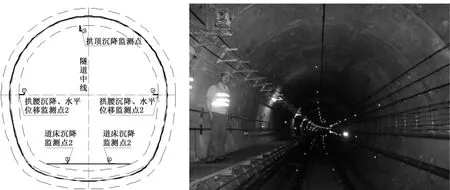
图8 自动化监测点位布置示意图及现场图
(2)基准点布置
测区共布置4个基准点,分别布置于远离变形区的大里程方向和小里程方向,各2个。

图9 监测线路布置图
(3)全站仪安装位置
全站仪安装位置里程为YK7+205,后视点里程为YK7+316(位于非变形区),如图10所示。

图10 全站仪、后视点、监测点位置关系示意图
3.2 观测方法
TS30全站仪安装在隧道里,通过GPRS/CDMA/EDGE数据链与安装有监测软件的电脑进行连接,由电脑控制全站仪,根据预先设定好的循环周期,对监测点进行学习测量并计算较差。监测数据自动存储在SQLServer数据库里,如果监测过程中出现误差超限或是监测点棱镜被遮挡等情况,软件会在数据库里自动记录该点的情况,继续监测下一个监测点,至循环周期结束,再对循环中出现异常情况的点进行重复监测。
通过控制软件,在每个观测周期开始前,利用前、后6个基准点,多次测回推算出测站点的坐标,然后,再对所有的点进行自动观测,得到观测点的坐标。
4 差分及平差处理
(1)距离差分改正
假设两个基准点1、2之间的距离稳定不变。设监测站至某基准点1和基准点2的已知斜距分别为、,在变形监测过程中,某一时刻实测的斜距分别为s'1、s'2,按下式可求出气象改正比例系数△s:

实测测站至某变形点的斜距为s'p,则经气象差分改正后的斜距为:

(2)高差的差分改正和平距计算
在极坐标的单向测量中,由于球气差的影响,要对所测的高差进行差分处理。基准点与测站点之间的高差h0是已知的,实测得监测站与基准点1、基准点2的高差分别为h'1、h'2:

式中,αn为垂直角;in为仪器高;ln为棱镜高。
根据下式可求出高差改正系数k:

利用两个基准点按式(4)求得高差改正系数k,由于测量时间较短,可以认为k值对基准点与变形点的影响是相同的,故按下式可求出变形点与监测站之间经高差改正后的高差hp:

求得监测站与各变形点间的斜距sp和高差hp后,按下式可求出监测站至变形点间的平距Dp:

(3)变形点坐标的计算
综合以上各项差分改正,按极坐标计算公式可准确求出每周期各变形点的坐标:

式中:Hzp为监测站至变形点的方位角;X0、Y0、H0为监测站的坐标值和高程值。
(4)平差处理
以经过距离及高差差分处理的观测值为输入值进行平差计算[9],解算三维坐标。
5 异常情况处理
如若监测过程中,出现全站仪找不到反射棱镜的情况,可按以下步骤进行寻找:
(1)把初始坐标展到CAD上,点击pline,(在Excel里,坐标之间以逗号隔开,测得的坐标与CAD里的x,y坐标相反,注意调整坐标,即画CAD时,把x坐标当作y坐标,y坐标当作x坐标)复制Excel里,以逗号隔开的那列数据,粘贴,画出初始值线(或把初始值展到CAD上,再连接成始值线,这种方法更容易找到与步骤3中的圆最近的点);
(2)在“设置”里,选择“坐标编辑”,点击“插入一点”,先选择一个能测到的点,点击“照准该点”,然后选择插入的新点,点击“学习测量”;
(3)以自由设站点的坐标为圆心,以插入点到自由设站点两点之间的距离为半径画圆,找到初始值与圆最近的点;
(4)在“设站定向”里,点击最后那个自由设站点,然后点击“设置测站”然后找到初始值与圆最近的点,选中后,点击“仪器定向”;
(5)随后,点击开始测量,看能否测量出数据,如果不能测出数据,重复以上步骤。如果能测出数据,则察看数据的偏差,偏差过大的话,则重新进行“自由设站”;
(6)“自由设站”:在“设置”里,选择“设站定向”,点击“自由设站”,弹出“自由设站”对话框,点击第一个后视点,然后点击“照准目标”,点击之后,等按钮弹出后,点击“测量”,等按钮弹出后,重复上述步骤,再测几次,最好把偏差控制在1 mm之内。然后,依次测其他的后视点,步骤如上。挑选好数据后,点击“保存测站”,等按钮弹出后,点击“设站定向”,等按钮弹出后,等待,会依次弹出两个对话框,之后就可以开始测量,如若测不出数据,可关闭软件,重新启动软件开始测量。
6 结论
自动监测是一种受人为影响少、自动化程度高的方法,能连续自动监测、监测数据可以自动记录、预处理并实时传输,极大提高了监测效率。随着地铁建设规模及线路长度的不断扩大,涉及的测量范围也越来越广,尤其在临近地铁隧道的基坑监测方面,为保证地铁隧道的安全,对地铁隧道的自动化监测已经越来越重要。深圳市“卓越梅林项目基坑支护工程项目”基坑的开挖会对地铁4号线的安全运营会产生一定的影响,所以,施工中采用自动化监测系统对运行中的隧道进行不间断监测,为基坑的开挖施工提供了及时、准确的信息,从而保证了深圳地铁4号线的安全正点运行。
[1]张广春,余志伟,张建旭.地铁施工第三方监测WebGIS系统[J].地理空间信息,2008,6(5):92~93.
[2]GB50026-2007.工程测量规范[S].
[3]翟万雨,徐顺明,闫文斌.自动化监测在广州地铁工程中的应用[J].市政·交通·水利工程设计,153~156.
[4]王如路,周贤浩,余泳亮.近年来上海地铁监护发现的问题及对策[J].施工技术,239~242.
[5]郑宜枫,周拥军.运行中的地铁隧道变形动态监测[DB/OL].中国论文下载中心.
[6]上海地矿工程勘察有限公司.地铁运营自动化监测技术国内外研究现状调研报告[R].2010.
[7]http://club.topsage.com/thread - 1402533 - 1 - 1.html[OL].
[8]王如路,刘建航.上海地铁监护实践[J].地下工程与隧道,2004,1:369 ~375.
[9]孔祥元,梅是义.控制测量学[M].武汉:武汉测绘科技大学出版社,1996.
