PMSM转速调节系统安排过渡过程方法的研究
2012-09-22,,,
,,,
(1.广东工业大学 自动化学院,广东 广州 510006;2.广东工业大学 信息工程学院,广东 广州 510006)
1 引言
永磁同步电机(PMSM)因其体积小、惯量低、损耗小、效率和功率因数高、结构简单、运行可靠、易于维护等优点,在高性能调速和伺服系统中得到越来越广泛的应用。PMSM转速调节大多采用比例积分(PI)控制,其靠给定转速与实际响应速度之间的误差通过PI调节来消除误差;只要选择合适的PI参数使闭环稳定,就能达到静态指标即使系统无静态误差。
尽管PMSM转速调节PI控制的稳定余度不小,但动态品质对PI增益的变化敏感,具有好的动态品质的余度不大。在电机实际运行中,由于电磁干扰、温度、湿度等因素的影响,电机的机电参数是时变的和非线性的,负载以及给定转速也是变化的,这就需要经常变动PI增益,限制了PI调节在实际系统中的应用。
其他一些先进、智能控制方法以及智能PID,如自适应、滑模变结构、模糊控制、神经网路、灰色控制等在PMSM转速调节系统中不断得到研究和发展,但这些控制器的设计、参数整定繁杂;在实际的控制系统中,受计算能力和精度的限制,难以达到理想的实验结果。
2 PMSM数学模型
PMSM的三相定子绕组感应电势为正弦波,与感应电机相比,电子磁场和转子磁场无相对运动,无滑差损耗;转子由永磁材料构成产生气隙磁通,无励磁绕组、机械换向器和电刷,转子没有损耗,调速范围宽、结构简单、运行可靠、易于维护。永磁同步电机的数学模型是一个多变量、非线性、强耦合系统,为了实现转矩线性化控制,须对转矩的控制参数实现解耦。本文采用转子磁场定向(id=0)的矢量解耦控制方法,矢量坐标图如图1所示。
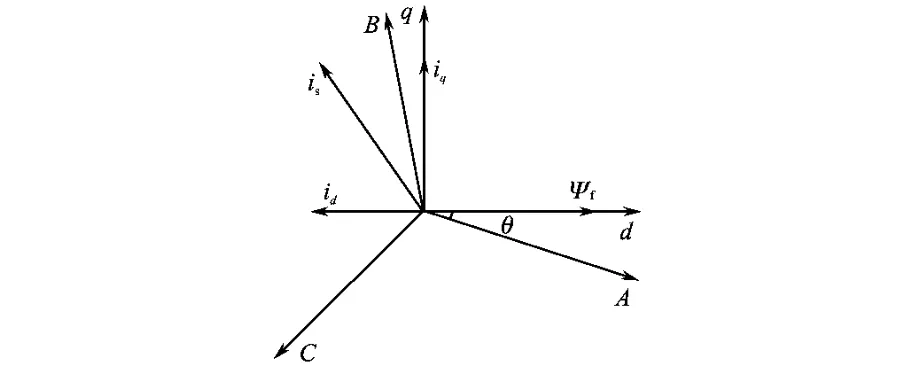
图1 永磁同步电机矢量坐标图Fig.1 Vector diagram for PMSM
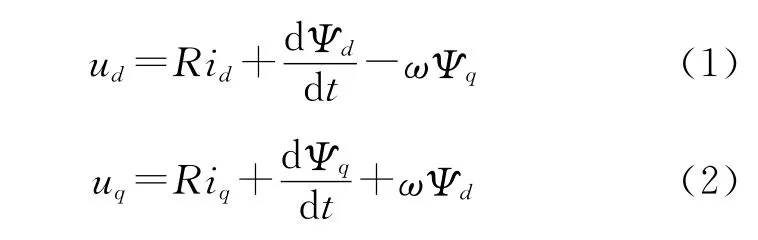
在d,q轴坐标系中,PMSM的电压方程:
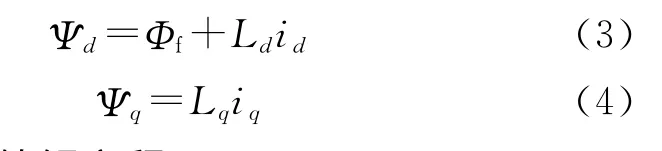
PMSM的磁链方程为
PMSM的电磁转矩方程

PMSM的机械运动方程

式中:ud,uq为d,q轴定子电压;id,iq为d,q轴定子电流;Ψd,Ψq为d,q轴空间磁链;R为定子电阻;Ld,Lq为d,q轴定子电感;Φf为转子永磁体产生的磁通;Te为输出电磁转矩;TL为负载转矩;J为转动惯量;B为粘滞摩擦系数;ωr为转子机械角速度;ω为转子电角速度,ω=pnωr;pn为极对数。
3 控制器的设计
3.1 跟踪微分器及其作用
跟踪微分器的作用是对系统的参考输入安排过渡过程。系统对阶跃输入响应的过渡过程特性与系统的阶密切相关,比如一阶系统的阶跃响应有非零初始斜率;二阶系统的阶跃响应有非零初始加速度。因此安排过渡过程,不仅要考虑系统的各种约束条件,还要匹配系统的阶。
PMSM转速控制环节是一个二阶系统。利用二阶离散系统最速控制综合函数构造的最速离散跟踪微分器,可以实现对输入信号的快速、无超调、无振颤跟踪,并给出此过渡过程的微分信号,可以用于PMSM转速调节系统中。
表2中的数据表明,一级反应器的有机硫水解率对各级反应器的运行状况存在较大影响。随着一级反应器有机硫水解率的降低,各级转化率和总硫转化率均有所降低。一级反应器有机硫水解率变化10百分点左右,对装置总转化率的影响可达0.4百分点,可见有机硫对装置各级转化和总硫转化率均有明显影响。
跟踪微分器是一个动态信号处理环节:将输入信号v(t)转换为两路信号,其中一路为过渡过程信号v1,v1跟踪v(t),一路为变化趋势信号v2,从而把v2作为v(t)的“近似微分”。其作用是根据参考输入v(t)和受控对象的限制来安排过渡过程,得到光滑的输入信号并提出此过渡过程的导数。最速离散跟踪微分器的数学表达式为
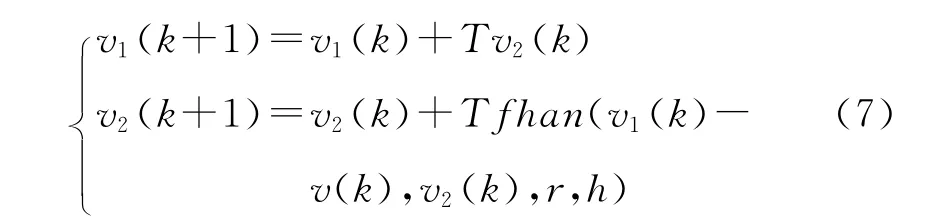
fhan(v1,v2,r,h)为如下定义的非线性函数:

其中
式中:T为积分步长,r和h为可调参数。
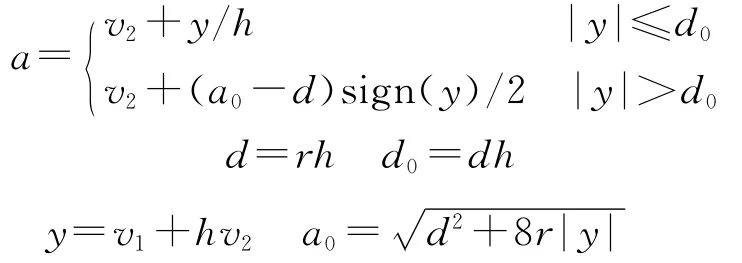
r越大跟踪速度越快;积分步长T的缩小对抑制噪音放大起很大作用;最速离散跟踪微分器速度曲线无高频振荡,但会有超调现象,h取适当大于步长T的值,可以消除速度曲线中的超调现象,从而抑制微分信号中的噪音放大,参数h也称作跟踪微分器的滤波因子。当积分步长T确定,扩大滤波因子是增强滤波效果的有效手段,在这里取h=5T。
图2a和图2b分别是在给定转速600r/min,1 500r/min,当T=0.000 05,h=5T,r=3 000时的经TD设定的过渡过程。
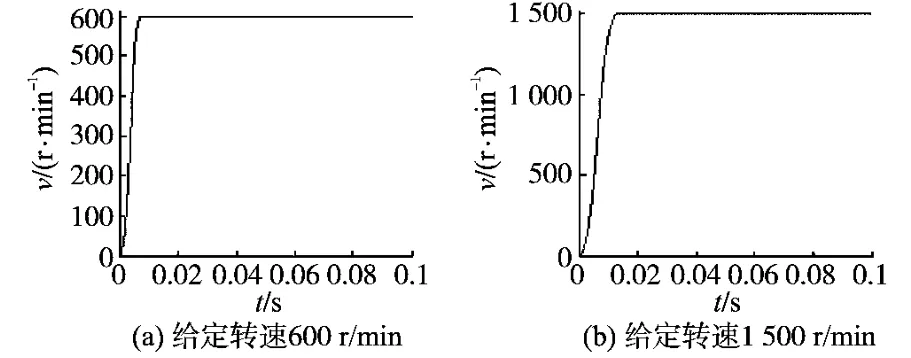
图2 不同给定转速下跟踪微分器设定的过渡过程Fig.2 Arranging transition course of different speed under the tracking-differentiator
3.2 控制器结构及其实现
安排过渡过程的PMSM转子磁场定向矢量控制原理框图如图3所示。

图3 安排过渡过程的PMSM转速调节原理框图Fig.3 Speed control principle diagram of PMSM for arranging transition course
检测电机转子位置,转化为转子机械角速度ωr,按v=60ωr/(2π)得到转子机械转速作为速度环反馈信号,给定转速v*经过TD安排过渡过程作为转速环输入信号,经过两级PI调节实现PMSM转速环的稳定控制。
这种改进型PI控制方法结构简单,只增加一个控制参数r,且保留了经典PI控制的优点,控制参数易于整定;通过增大转速环PI参数来保持PMSM转速响应的快速性,转速环PI参数的增大提高了系统的鲁棒性和适应性。
4 仿真验证
本文应用Matlab2009a在Simulink中对安排过渡过程的PMSM转速调节系统进行仿真研究。系统离散步长T=0.000 05,则h=0.000 25;永磁同步电机参数如下:定子电阻R=2.875Ω,定子电感Ld=Lq=8.5×10-3H ,转子永磁磁通Φf=0.175Wb,转子转动惯量J=0.000 8kg·m2,粘滞摩擦系数B=0.000 1N·m·s,极对数pn=2。在电机实际运行中,由于电磁干扰、温度、湿度等因素的影响,电机的机电参数是时变的和非线性的,把这些参数的变化以及负载变化看做对系统的扰动,它们会使系统的响应性能变差,一些内扰甚至会造成系统失稳。
在给定转速600r/min、负载转矩3N·m情况下对控制器进行参数整定。其中经典PI调节参数整定:电流环比例系数kp=100,积分系数ki=7 200;速度环比例系数kp=0.03,积分系数ki=1.2。安排过渡过程的参数整定:电流环比例系数kp=100,积分系数ki=7 200;速度环比例系数kp=1.5,积分系数ki=60;r=3 000。从图4中电机响应的特性曲线可以看出,经典PI调节和安排过渡过程的PMSM转速调节系统都得到很好的控制性能。图5a和图5b分别是经典PI无超调控制和安排过渡过程的PMSM电流响应特性曲线。
图4 给定转速600r/min,负载转矩3N·m的电机响应Fig.4 The motor response for a given speed 600r/min,load torque 3N·m
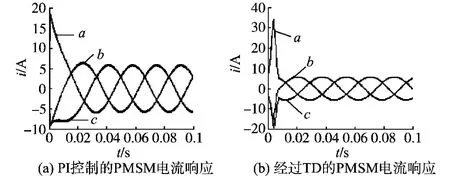
图5 负载转矩3N·m下不同控制方法的电机响应Fig.5 The motor current response curves of different control methods for load torque 3N·m
仿真实验表明,采用PI控制的PMSM转速调节系统,对电阻R和摩擦系数B等扰动具有良好的鲁棒性,但对转动惯量J和转子磁通Φf等扰动的控制效果不能令人满意。图6a和图6b分别是转动惯量变成2J和转子磁通变成0.7Φf的电机响应,可以看出安排过渡过程调速系统对电机的机电参数具有良好的鲁棒性。
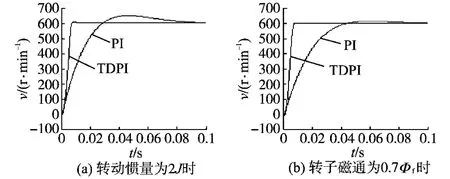
图6 电机响应Fig.6 The motor response
图7为保持给定转速600r/min、初始负载为0、在0.2s时突加6N·m负载的电机响应,虚线为经典PI控制的电机响应,实线为经过TD的电机响应。经典PI调节在负载轻时,电机出现超调;负载较重时,电机响应速度变慢。图8a和图8b分别是经典PI控制和安排过渡过程的PMSM转矩响应特性曲线,安排过渡过程的PMSM对突变负载迅速反应。把负载转矩看成对转速响应的干扰,从响应特性曲线可以看出,安排过渡过程的调速系统具有优良的对负载扰动的抗扰能力。
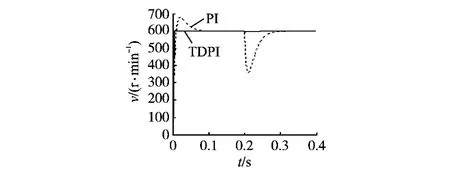
图7 转速600r/min突加负载电机响应特性曲线Fig.7 The motor speed response curves to sudden load for speed 600r/min
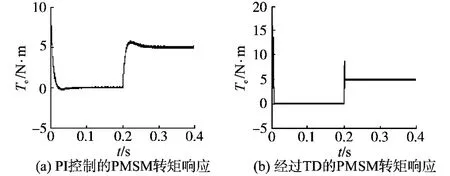
图8 负载转矩3N·m不同控制方法的电机响应Fig.8 The motor torque response curves of different control methods for load torque 3N·m
在PMSM转速控制中,给定转速的变化也会影响系统的动态特性。图9a和图9b为保持负载转矩3N·m,电机在不同转速下的响应。从图9中可以看出经典PI调节在给定转速降低时,电机响应速度变慢;给定转速升高时,电机响应出现超调。安排过渡过程调速系统在不同转速下具有优良的动态特性,上升速度快、超调量很小。
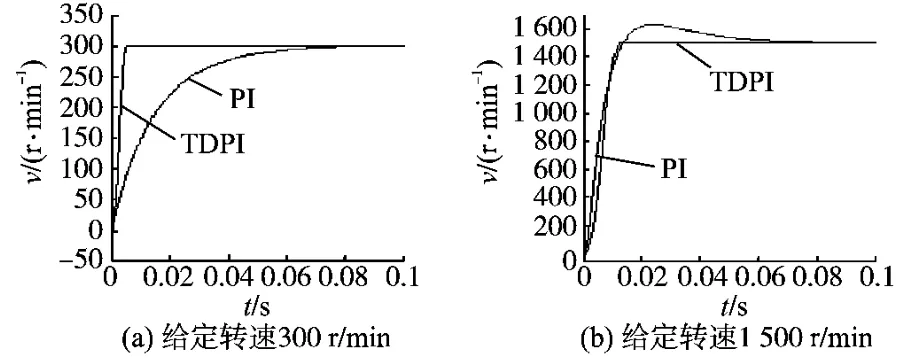
图9 负载转矩3N·m不同转速下电机响应特性曲线Fig.9 The motor speed response curves of different speed for load torque 3N·m
以上的仿真实验通过安排过渡过程实现了PMSM转速响应快速超调小,系统对机电参数不敏感,具有优良的抗负载扰动能力,提高了系统的鲁棒性,且电机对给定转速具有良好的适应性,实验证明安排过渡过程可以获得良好的控制性能。
5 结论
本文将最速离散跟踪微分器应用于PMSM转速调节系统中,对给定转速安排光滑的过渡过程,详细介绍了跟踪微分器的特性、设计方法和参数整定,解决了经典PI调节快速性与超调量之间的矛盾。仿真实验结果表明安排过渡过程是提高PMSM转速调节系统鲁棒性、适应性和稳定性的一种简单有效方法。
[1]黄焕袍,万晖,韩京清.安排过渡过程是提高闭环系统“鲁棒性、适应性和稳定性”的一种有效方法[J].控制理论与应用,2001,18(z1):89-94.
[2]唐小琦,白玉成,陈吉红.永磁同步电机高性能电流解耦控制的研究[J].电气传动,2009,39(10):18-22.
[3]舒望,赵荣祥,尚喆.永磁同步电机高精度控制系统研究[J].电气传动,2007,37(9):8-10.
[4]李运德,张淼,孙兴中.基于内模控制的永磁同步电动机调速系统设计[J].微特电机,2010,38(5):56-59.
[5]张霖,党选举,曾思霖.永磁同步直线伺服系统的一种双模控制[J].电气传动,2010,40(2):53-56.
[6]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.
[7]张淼,吴捷.基于自抗扰技术的光伏发电并网控制系统[J].控制理论与应用,2005,22(4):583-587.