三电平逆变器空间矢量控制算法研究
2012-09-22赵钢王磊
赵钢王磊
(1.天津理工大学 自动化学院,天津 300384;2.天津市复杂控制理论与应用重点实验室,天津 300384)
1 引言
二极管钳位式三电平逆变器由于其自身的优点使其在高压大功率场合得到广泛的应用,相对于传统的两电平逆变器,由于采用了比两电平多一倍的器件,开关管两端的电压只为直流侧的一半,器件的开关频率相应地降低,所以三电平逆变器适应于中高压变换器中;其次,相对于两电平逆变器,三电平逆变器输出电压波形接近于正弦,降低了谐波含量。但是,二极管钳位式三电平逆变器主电路直流侧2个电容由于存在充放电现象,导致中性点波动,严重时会导致开关器件损坏,所以需要采用相应的算法加以控制。在控制策略方面,二极管钳位式三电平逆变器多采用空间矢量算法,该算法提高了电压利用率,减少了输出电流谐波,并且易于实现[1-2]。
2 二极管钳位式三电平逆变器主电路拓扑结构分析
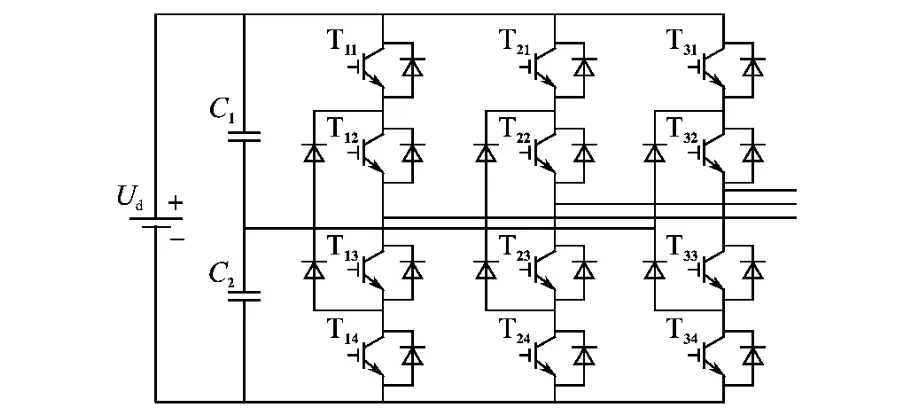
图1 三电平逆变器主电路Fig.1 Three-level inverter main circuit
在图1中,逆变器直流侧电压为Ud,每相由4个开关管构成,中间2个开关管辅有二极管,这样每相有3种开关状态。当T11,T12导通T13,T14关断,此时输出电压为Ud/2,设此时的开关状态为1;当T12,T13导通T11,T14关断,此时输出电压为0,设此时的开关状态为0;当T13,T14导通T11,T12关断,设此时的开关状态为-1。这样,逆变器的输出有27种开关状态,除去8种无效的状态后,剩下19种开关状态。
逆变器输出的三相空间矢量为
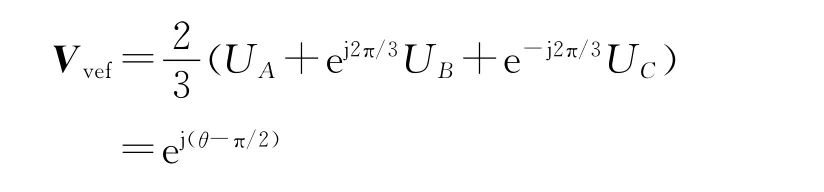
空间矢量包括4种矢量,大矢量,中矢量,小矢量,零矢量:其中大矢量对应输出2Ud/3的电压模长,中矢量对应输出的电压模长,小矢量对应输出Ud/3的电压模长,零矢量对应输出为0的电压模长。将各个矢量依次画出,并将各顶点用虚线相连,组成如图2所示的内外2个正六边形。矢量图包括6个大三角形,每个大三角形又包括4个小三角形。其中,大矢量位于外围正六边形的顶点,中矢量位于外围正六边形的中点处,小矢量位于内正六边形的顶点处,零矢量位于坐标原点处,小矢量又分为正小矢量和负小矢量[3-5]。
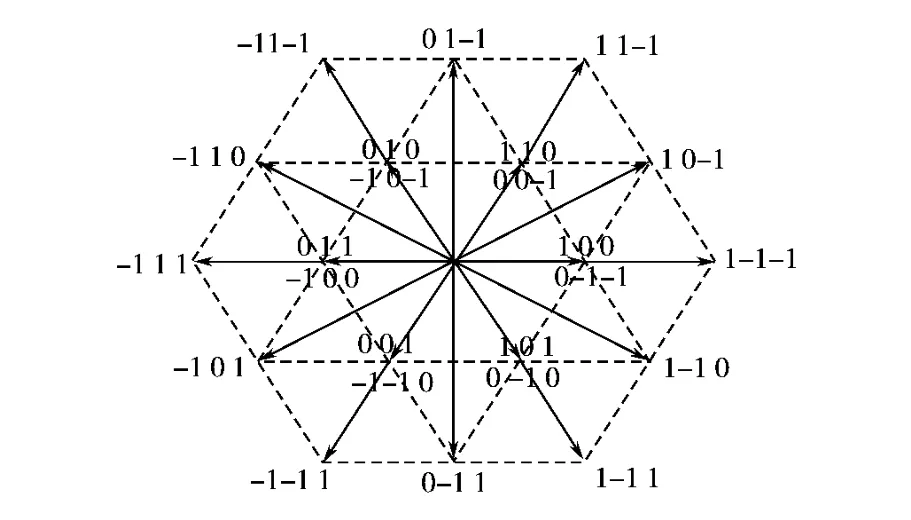
图2 空间矢量合成图Fig.2 Space vector synthesis map
3 三电平逆变器空间矢量算法
三电平逆变器空间矢量算法首先进行扇区判断,然后进行小区间判断,确定参考矢量由哪些矢量合成,最后合理安排这些矢量,控制逆变器电压的输出。
3.1 区域判断
如图2所示,空间矢量被6个大矢量分为6个正三角形区域,以大矢量1-1-1为起始逆时针方向每60°依次定义扇区Ⅰ,Ⅱ,Ⅲ,Ⅳ,Ⅴ,Ⅵ。由于整个空间矢量成对称性,所以只需对Ⅰ进行分析即可。
设三相参考电压分别为
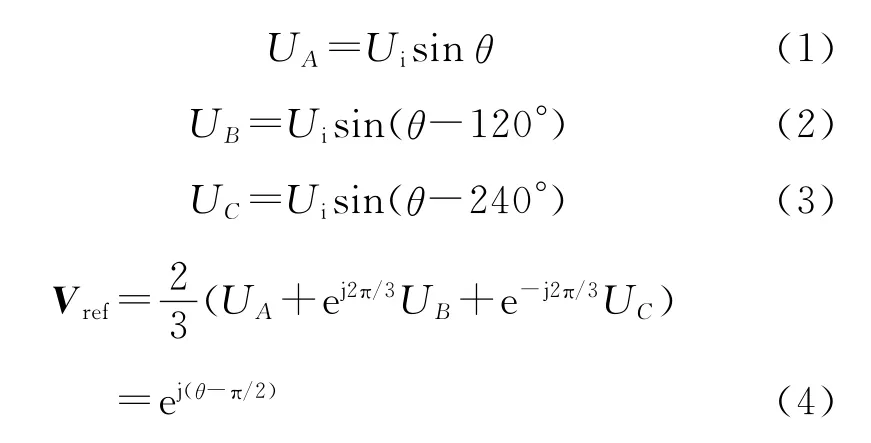
所以本文在采样时直接取θ-π/2作为参考矢量的幅角,根据θ-π/2的大小可判断出参考矢量落在哪一个大扇区。定义调制比为参考矢量与中矢量的模长之比,即根据m与θ可以判断矢量落在哪个小区间,具体的判断规则如表1所示。
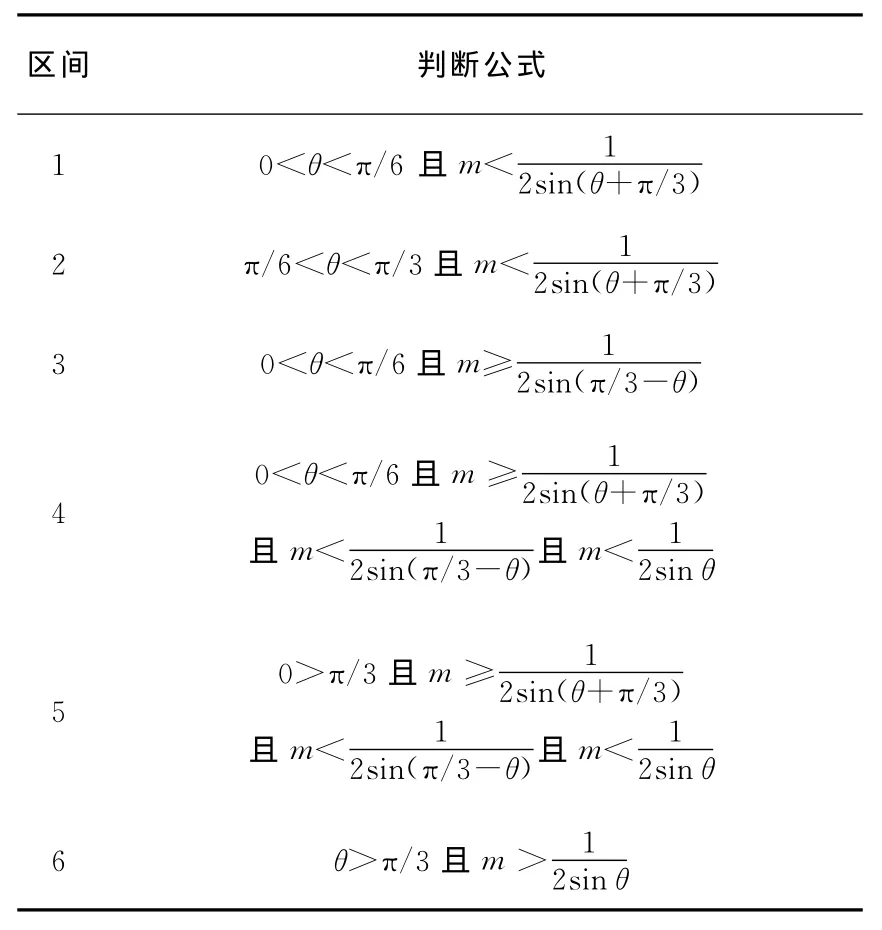
表1 小区间判断公式表Tab.1 Inter-cell judgment of the table
3.2 参考矢量合成
每个输出矢量的作用时间对应相应开关管的导通或关断时间,以参考矢量落在1区为例,如图3所示,根据参考矢量由邻近的3个矢量合成的原则,参考矢量由V0,V1,V2合成,设Ta,Tb,Tc分别为矢量V0,V1,V2的作用时间。Ts为空间矢量调制的控制周期。具体计算方法如下:

联立可以解出3个合成矢量各自作用的时间:
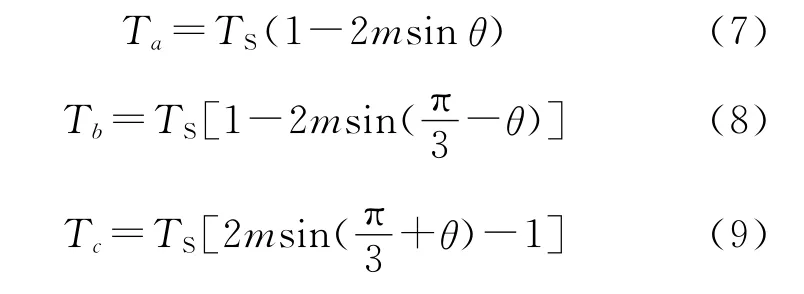
式中:m为调制深度。
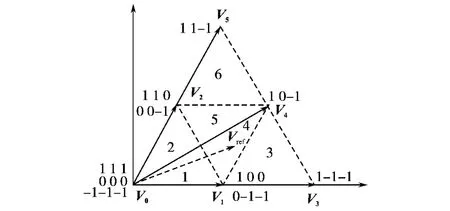
图3 第1扇区6个小区的矢量合成Fig.3 Vector synthesis map of The first sector
同理,可以推出参考矢量位于2,3,4,5,6区域的作用时间,根据各矢量的作用时间,按照中心化对称的原则安排矢量,可以得出参考矢量位于各个三角形中时的三相输出矢量时序图,由此就可以得到三相桥臂各开关器件的驱动信号[4-5]。
3.3 开关矢量作用顺序的确定
为了逆变器能够安全可靠运行,逆变器3种开关状态的转换只能让1和0,0和-1之间转换,禁止1和-1状态之间转换。当参考电压矢量旋转时,特别是当从空间电压矢量图中的一个扇区进入另一个扇区时,选择合成的3个开关矢量将发生改变,则逆变器三相的状态也将变化。相应地逆变器将按状态变化来进行开关动作。为了减少开关动作,逆变器每次仅一相进行开关动作,而其它两相状态保持不变。
以第1扇区为例,每个小三角形内最少含有一对小矢量,如果以正小矢量作为首发小矢量,则每个小三角形内的矢量作用顺序如表2所示,若以负小矢量作为首发小矢量,则每个小三角形内的矢量作用顺序正好与表2所示顺序相反。本文提出的SVPWM控制算法,所输出矢量的首发矢量都是正小矢量,由于相邻的2个正小矢量只相差一个状态,这样可以避免相邻2个扇区切换过程中发生矢量突变。图4为第1扇区的6个小区的输出时序图,根据这个时序图,就可以得出三相桥臂开关器件的驱动信号。
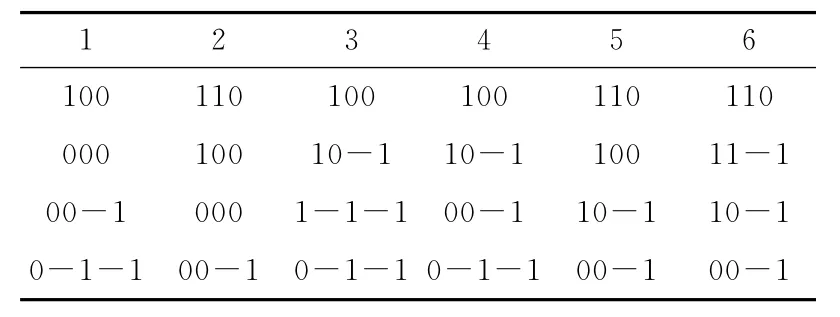
表2 第1扇区的电压矢量Tab.2 Voltage vectors of the first sector
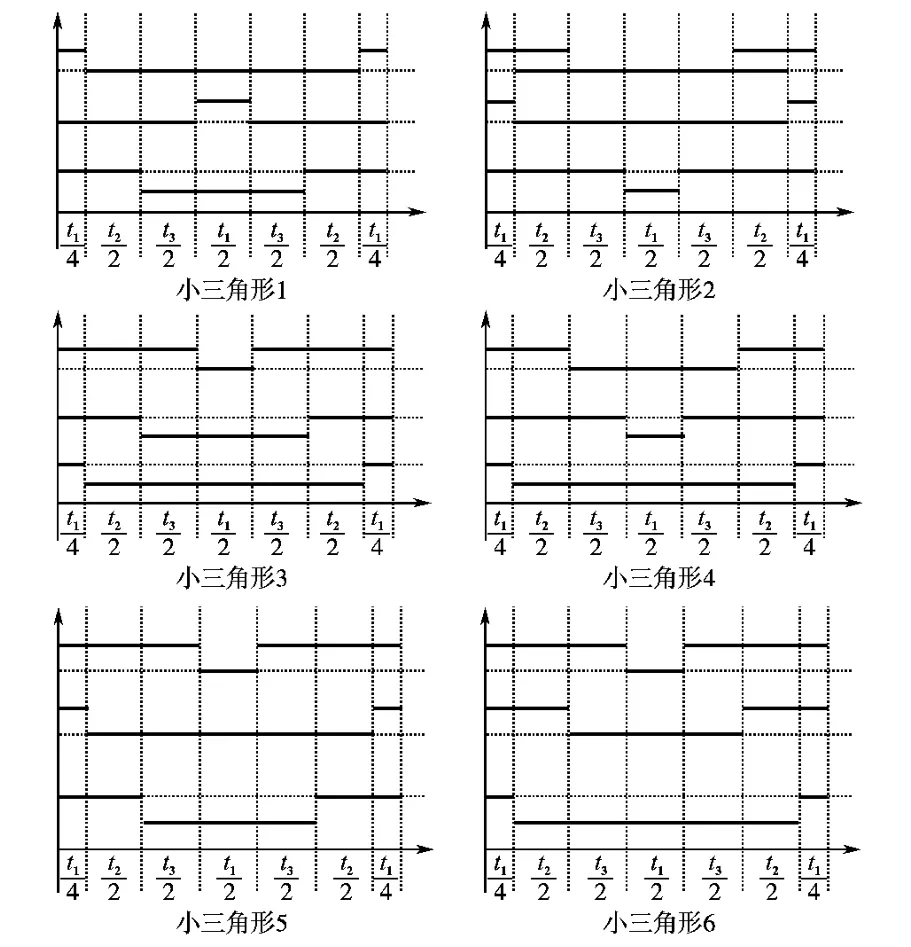
图4 第1扇区各个小区间矢量时序图Fig.4 Vector timing diagrams of the first sector
4 中点电压的平衡控制
当逆变器直流侧电压中点不平衡时,逆变器输出电压波形将出现畸变,负载中将含有偶次谐波;直流侧的2个电容电压经常变动,影响电容的使用寿命;部分开关器件承受的电压增大,影响逆变器的正常工作。中矢量中有一相连接到直流侧的中点,这样负载在一定程度上影响中点电位。中点电位不平衡的主要因素来源于中矢量,并且不能调节,只能通过小矢量来间接调节。由于成对小矢量的模长相等,成对的小矢量产生的线电压也相等,只是流向中点的电流方向相反,所以它们对中点电压有相反的影响。在空间矢量调制(SVPWM)中,中点电压平衡控制方法多采用调节成对小矢量作用时间的方法,来改变中点电流流入流出的时间并抑制直流侧中点电位的波动[5-7]。
在每个控制周期的开始对中点电压和电流进行采样,检测值经处理后,作为协调正负小矢量作用时间的依据,来平衡中点电位的波动。本文引入参数k调节正负小矢量的作用时间,来调节中点电流流入流出的时间,假设正小矢量作用时间为kTx,负小矢量的作用时间为(1-k)Tx,直流侧电容电压分别为VDC1和VDC2,中点电流流出方向为正,具体的控制规律是:
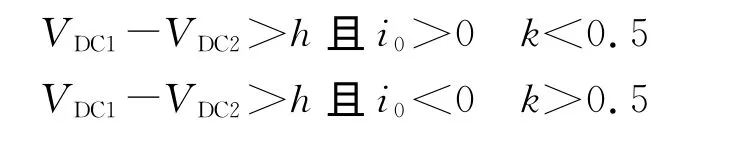

式中:h为中点电压波动的最大值;i0为中点电流。h的引入降低了k值改变的频率,从上面公式很容易得到k的取值,其控制框图见图5[7-10]。
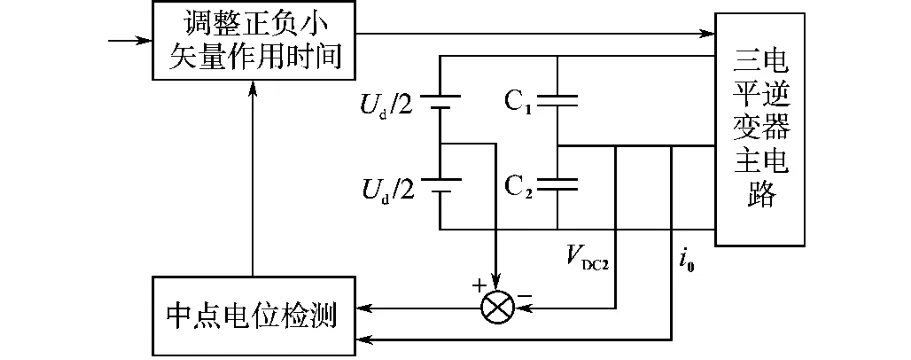
图5 中点电位控制图Fig.5 Block diagram of mid-point potential control
5 仿真结果分析
针对本文提出的三电平逆变器空间矢量控制算法,采用Matlab仿真软件中自带的Simulink工具箱来搭建仿真模型,验证该算法的正确性。仿真参数:直流侧电压VDC=1 000V,直流侧电容C1=C2=2 000μF,三相对称负载电感L=10mH,采样周期Ts=0.1ms,基波频率f=50Hz。
当逆变侧接阻性负载时,输出端相电压波形如图6所示。

图6 逆变侧接阻性负载时输出相电压Fig.6 Inverter output phase voltage with resistive load
当逆变侧接感性负载时,输出端相电压波形如图7、图8所示。
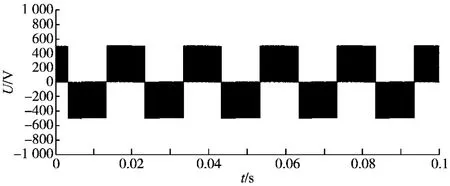
图7 逆变侧接感性负载时输出相电压Fig.7 Inverter output phase voltage with inductive load
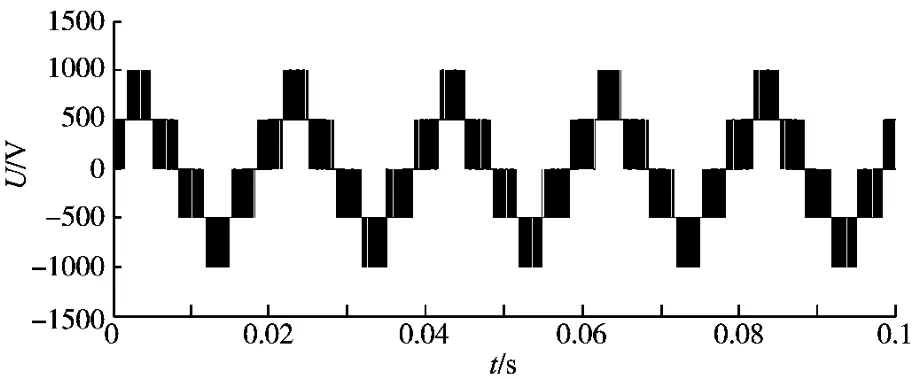
图8 逆变侧接感性负载时输出线电压Fig.8 Inverter output line voltage with inductive load
6 结论
仿真结果表明,逆变器输出3个电平的相电压和5个电平的线电压,由于逆变器电平数的增加,使得三电平逆变器输出电压的波形更接近于正弦,在开关频率不变的情况下,输出电压的谐波含量大大降低,三电平逆变器降低了开关器件的工作频率,提高了逆变器的耐压等级,所以,非常适合高压大功率场合。
[1]李阳,戴鹏,于月森,等.三电平逆变器SVPWM 过调制控制策略综述[J].电气传动,2010,40(7):8-17.
[2]王建渊,武文婷,钟彦儒.三电平逆变器PWM 技术的评价及对比研究[J].电气传动,2010,40(2):22-28.
[3]张晔,汤钰鹏,王文军.三电平逆变器空间矢量调制及中点电位平衡研究[J].电气传动,2010,40(2):33-36.
[4]黄卫平,谢运祥.基于TMS320F2812的三电平逆变器的研究[J].电力电子技术,2010,44(1):31-33.
[5]张卫丰,余岳辉,刘璐.三电平逆变器空间电压矢量控制算法仿真研究[J].电力电子技术,2006,40(1):3-5.
[6]高红专,张志文,王磊,等.基于DSP的三电平逆变器SVPWM算法的研究[J].电力系统及其自动化学报,2006,18(4):62-66.
[7]姜卫东,王群京,陈权,等.考虑中点电压不平衡的中点钳位型三电平逆变器空间矢量调制方法[J].中国电机工程学报,2008,28(30):20-26.
[8]王建赜,薛畅,胡锡金,等.三电平逆变器中性点电压精确调节的简化算法[J].电力系统及其自动化学报,2010,22(1):55-59.
[9]宋文祥.一种具有中点电位平衡功能的三电平空间矢量调制方法及其实现[J].中国电机工程学报,2006,26(12):95-100.
[10]宋文祥,陈国呈,束满堂,等.中点钳位式三电平逆变器空间矢量调制及其中点控制研究[J].中国电机工程学报,2006,26(5):105-109.