基于滑模观测器的PMSM无传感器控制
2012-09-22,,,
,,,
(南京工业大学 自动化与电气工程学院,江苏 南京 210009)
1 引言
在对永磁同步电机(PMSM)进行矢量控制时需要检测转子的位置信息,很多情况下通过与转子同轴的光电编码器实现这一要求。但在很多应用场合,光电编码器会增加系统的成本降低系统的可靠性,因此近年来永磁同步电机的无速度传感器控制成为国内外学者研究的热点。提出了许多方法,归纳起来主要有:利用定子端电压和电流直接计算转子位置和速度的方法、观测器法、模型参考自适应法、高频注入法和基于观测器法,观测器的实质是重新构造一个人工智能理论的估算方法[1-3]。采用新系统,利用原系统中可以直接测量的变量作为新系统的输入,使其输出的状态观测值等价于原系统的状态值。而滑模观测器则是利用其本身对参数扰动鲁棒性强的特点,将一般观测器中的控制回路改为滑模变结构形式,这种观测器在永磁同步电机的无速度传感器控制领域得到了广泛应用[4-5]。
2 滑模位置观测器
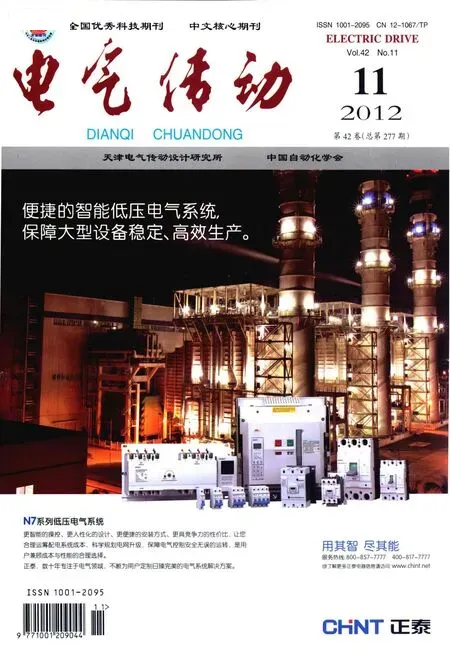
永磁同步电机在α-β静止坐标系下的定子电压方程为
式中:Ψfαβ为静止坐标轴等效磁链;-ωeΨfαβsinθe为定子反向电动势的α轴分量记为Eαemf;ωeΨfαβ×cosθe为定子反向电动势的β轴分量记为Eβemf。
则可以得到iα和iβ的状态方程:

根据滑模观测器理论,一阶系统的结构为

式中:Z为待观测值;Z0为已知部分;a(t)为不确定部分。
定义观测误差为e=Z-,则针对一阶系统将滑模切换函数设计为

则对Z构造滑模观测器为

式中:Ksw为滑模开关增益。
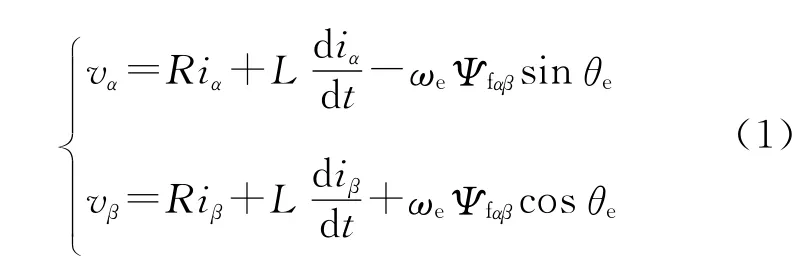
对上式进行稳定性分析,s的导数为

定义李亚普诺夫函数为

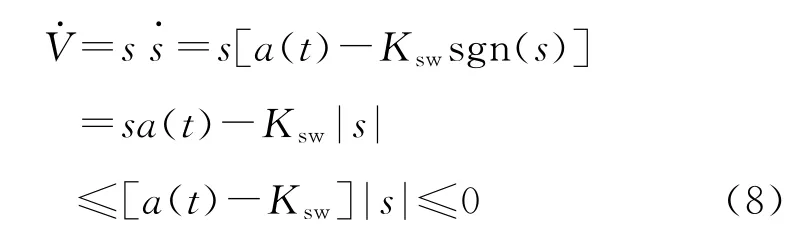
因此,为了满足式(8)的条件,滑模开关增益Ksw应大于系统的不确定部分a(t)。根据式(5)可以得到式(2)对应的滑模观测器为
当滑模观测器的状态观测值逼近实际值时,有
由于定子反向电动势分量包含在滑模观测器的开关分量内,因此,需要对)和Kswsgn的值进行低通滤波,进而得到比较准确的-Eαemf和-Eβemf,最后,根据下式可得到转子的电角度θe为

但低通滤波器会引入延迟,因此,需要进行相应的角度补偿,由于补偿角度值是一个与电机速度相关的值,按以往的方法需要在处理器中存储相应速度范围内的补偿角度值,这会占据宝贵的系统资源,因此使用自适应滤波器能够根据电机转速实时调整截止频率,而且角度延迟为固定值[6]。
自适应低通滤波器的传递函数为

式中:ω为电角速度。
截止频率处的电角速度ωcutoff=ω/K,则相角延迟为常数,即:
然后与式(10)式相加即可得到校正后的电角度值了。综上所述,可以得到滑模位置观测器的结构如图1所示。
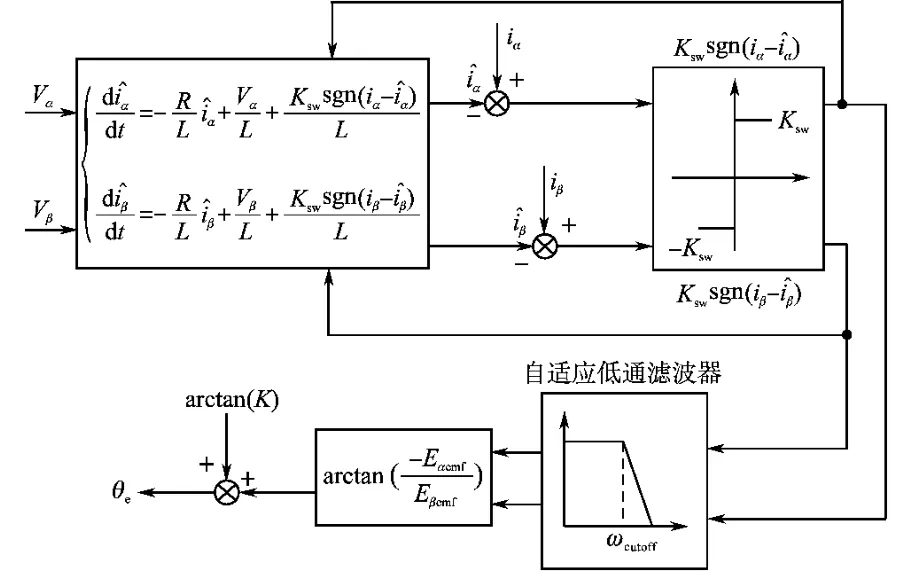
图1 滑模位置观测器结构图Fig.1 Sliding mode position observer structure
通过滑模位置观测器得到转子位置后就可以对永磁同步电机进行矢量控制,整个系统的结构如图2所示。矢量控制的核心是坐标变换,将三相定子电流变换为转矩电流分量iq和磁通电流分量id,并将id的参考值设置为0进而实现永磁同步电机的最大转矩控制。同时,采用空间矢量脉宽调制SVPWM法对电压源型逆变器内的6个功率开关管进行控制,逆变得到的三相交流电可以驱动永磁同步电机运行。

图2 基于滑模位置观测器的永磁同步电机控制系统结构图Fig.2 The PMSM control system structure based on sliding mode position observer
3 算法改进
上面介绍的滑模位置观测器采用传统的Bang-Bang控制方法,这会导致滑动模态在切换面附近呈现强烈的抖振,因此用饱和函数sat(s)代替符号函数sgn(s),使系统运行在准滑动模态下。从相轨迹来看,具有理想滑动模态的控制是使一定范围内的状态点均被吸引到切换面上。而准滑动模态控制则是使一定范围内的状态点均被吸引至切换面的某个Δ邻域内,这个区域也被称为滑模切换面的边界层。在边界层内,准滑动模态不要求满足滑模存在条件,因此准滑动模态不要求在滑模切换面上进行控制结构的切换,使得它从根本上避免或削弱了抖振[7],图3为采用sat(s)饱和函数的滑模位置观测器结构图。
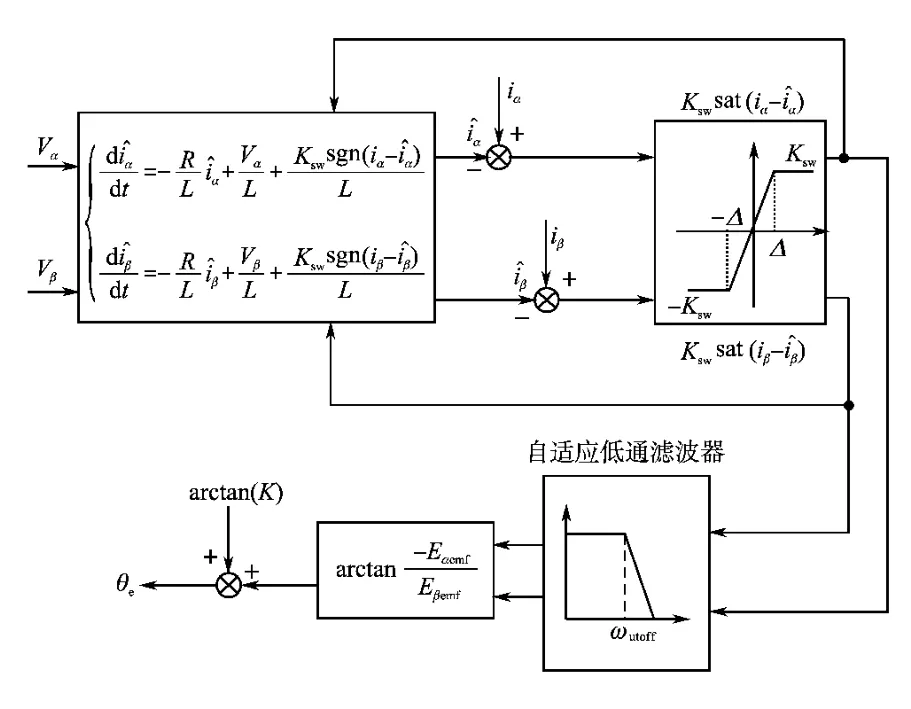
图3 采用sat(s)饱和函数的滑模位置观测器结构图Fig.3 The sliding mode position observer structure based on the sat(s)saturated function
4 初始启动算法
当永磁同步电机处于低速运行状态时,估计得到的反向电动势幅值很小,误差较大。为了解决这个问题,我们设计了永磁同步电机的初始启动算法[8],其原理就是在系统开始运行时,速度控制环路和滑模位置观测器都不起作用。然后,电机以固定的加速度启动,Park变换需要的角度信息由随时间变化的二次函数曲线给定。
虽然,系统工作在速度开环状态下,仍然需要对电流内环进行id=0的最大转矩电流控制,电机转矩由交轴电流分量iq决定。经过固定的加速时间后,系统会重新回到速度闭环模式下正常运行,图4是系统在初始启动状态下的控制结构图。
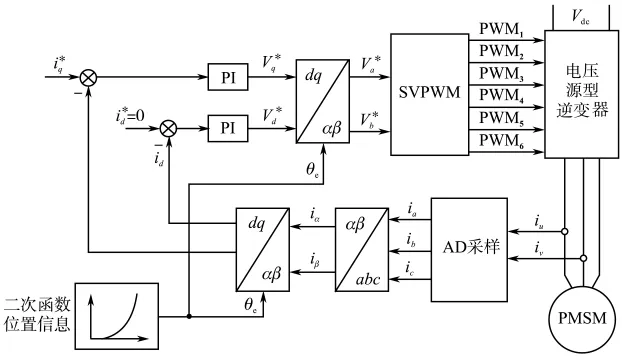
图4 系统在初始启动状态下的控制结构图Fig.4 The control structure of system in the initial starting state
5 实验装置
永磁同步电机的无速度传感器控制系统的实验装置,主要基于TI公司的TMS320F2812DSP以及三菱公司的PS21564IPM集成功率模块进行构建[9-10]。TMS320F2812DSP 最高可以工作在150MHz的时钟频率下,产生的SVPWM信号可以控制PS21564内部的6个IGBT功率开关管,进而逆变出可控的三相交流电驱动永磁同步电机运行。通过2个霍耳电流传感器分别采集永磁同步电机定子绕组的U,V两相瞬时电流,然后经过信号调理电路处理后,送入DSP内部的12位AD转换器进行处理,最终实现永磁同步电机的矢量控制。同时将正交编码器的信号送入DSP以便比较实测转子位置和估计转子位置的差异,便于进行参数调整和性能分析[11]。图5为实验装置的结构框图。

图5 实验装置结构框图Fig.5 Structure diagram of the experiment device
6 实验结果
实验中采用了南京力源强磁有限公司生产的SQ060A130A30-8E永磁同步电机,主要参数为额定功率Pe=400W,转动惯量J=0.5kg·m,额定电压Ue=220V,定子电阻Rs=1.9Ω,额定转速ωe=3 000r/min,定子电感Ls=8mH,额定转矩Te=2N·m,极对数p=4,额定电流Ie=2 A,反馈为带初始定位2 500线光电编码器。
由于TMS320F2812DSP的程序主要是在CCS3.3集成开发环境中进行调试的,通过其内部的Graph功能可以将需要观察的数据进行图形显示,以便调整相关参数使系统性能得到优化。图6是当永磁同步电机运行于1 500r/min时的转速波形,可以看到当系统开始运行后,根据软件算法的设置,永磁同步电机会有一段匀加速过程(初始启动),时间大约为75ms,这段时间内只有电流环处于调节状态。当速度达到滑模位置观测器的最低转速要求后,系统切换为速度闭环状态。在闭环运行初期,速度估计值抖振比较严重,这主要是由于滑模位置观测器的估计状态在滑模面附近来回抖动造成的,随着估计状态逐渐趋近于滑模面,抖振会逐渐减弱。图7是转子位置实际值与观测器输出值的波形,1通道为实际转子位置,2通道为估计得到的转子位置。
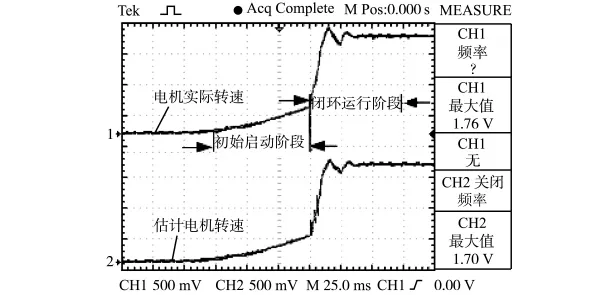
图6 实际转速与估计转速曲线Fig.6 The curves of the actual and estimated speed
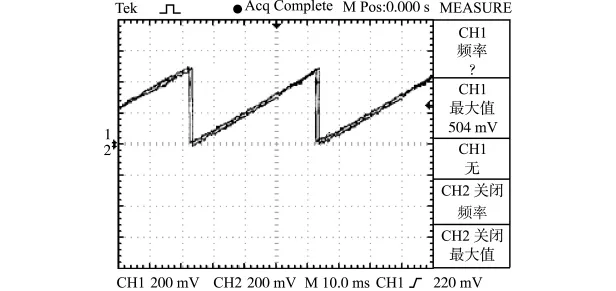
图7 实际转子位置与估计转子位置波形Fig.7 The waveforms of the actual and estimated rotor position
7 结论
本文采用滑模位置观测器估计永磁同步电机的转子位置,实现了永磁同步电机的无速度传感器控制。采用TMS320F2812DSP作为主控制器,使系统具有结构简单、参数调整方便等优点。针对传统滑模位置观测器在滑模切换层附近抖振严重的问题,采用饱和函数对观测器进行了改进,并提出了初始启动算法用于解决滑模位置观测器低速性能差的缺点。系统运行稳定可靠、算法实现简便,具有较强的工程应用价值。
[1]Tomonobu S,Tsuyoshi S,Katsumi U.Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors[C]∥PESC,1995:759-765.
[2]Albert Q,Wu B,Hassan K.Sensorless Control of Permanent Magnet Synchronous Motor Using Extended Kalman Filter[C]∥Electrical and Computer Engineering Conference,2004:1557-1562.
[3]Wu R,Slemon G R.A Permanent Magnet Motor Drive Without a Shaft Sensor[J].IEEE Transactions on Industry Applications,1991,27(5):1005-1011.
[4]Francesco Parasiliti,Roberto Petrella,Macro Tursini.Sensorless Speed Control of a PM Synchronous Motor by Sliding Mode Observer[C]∥ISIE,1997:1106-1111.
[5]Zelia M,Peixoto A.Speed Control of Permanent Magnet Motor Using Sliding Mode Observers for Induced Emf Position and Speed Estimation[C]∥IEEE-IAS Annual Meeting,1995:1023-1028.
[6]Kang Kye-Lyong,Kim Jang-Mok,Hwang Keun-Bae,etal.Sensorless Control of PMSM in High Speed Range with Iterative Sliding Mode Observer[C]∥Applied Power Electronics Conference and Exposition,2004:1111-1116.
[7]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[8]Cavallo A,Natale C.High-order Sliding Control of Mechanical Systems:Theory and Experiments[C]∥Control Engineering Practice,2004,12:1139-1149.
[9]Microchip Technology Inc.Sensorless Field Oriented Control of PMSM Motors[R].USA:Microchip Technology Inc,2007.
[10]陈新伟,李学锋.DSP在永磁同步电机速度控制中的应用[J].电力电子技术,2005,39(6):95-97.
[11]陈国呈.新型电力电子变流技术[M].北京:中国电力出版社,2004.