航天虚拟操作分析技术概念研究
2012-09-19葛哲学杨拥民吴福章
葛哲学,杨拥民,罗 旭,吴福章
(国防科学技术大学装备综合保障技术重点实验室,长沙410073)
1 引言
在载人航天活动中,航天员通常需要严格遵循各种操作规程,执行大量的维修和试验操作任务,对于空间站等长期有人值守的航天器来说,航天员的试验和维修操作任务非常繁重。据统计,国际空间站上每天的维修操作时间超过2h,而和平号空间站的维修操作时间更长。如果载人航天器的设计和操作任务设计不合理,超过人在微重力环境当中的生理极限,很有可能导致航天任务的失败甚至是重大的灾难性事故[1]。
因此,航天器设计的人机界面必须具有良好的可操作性,从而保证航天员能够高效、可靠地完成规定的各项操作任务。在航天器设计阶段,就应当设法利用计算机仿真技术进行可操作性分析,查找出不利航天员操作的设计缺陷并及时加以改进。欧美国家非常重视虚拟操作分析技术的研究,开发了BHMS等一系列虚拟操作分析的软件工具,并成功应用于国际空间站、航天飞机的研制[1,4,6-8]。而我国在这方面的基础研究较为薄弱,相关的概念尚不明晰,本文的目的是明确航天虚拟操作分析的基本内涵和技术体系,为后续操作分析方法的理论研究和应用奠定基础。
2 概念内涵与外延
2.1 内涵
航天虚拟操作分析技术的内涵是指反映对象的特有的、本质的属性。它是指在航天器设计阶段,通过构建航天虚拟操作环境并叠加虚拟航天员模型,利用航天器系统、分系统或者零部件等虚拟数字样机,借助人在回路或者全虚拟的方法,对涉及到航天操作的行为进行合理性分析和评价,进而检验航天器人机界面设计或者操作任务是否符合航天员特性及要求的一门技术。虚拟操作分析是整个载人航天器工效学评价的重要环节和步骤,是质量保障的必要措施,也是航天飞行任务合理性检查的重要技术手段。
航天虚拟操作分析由方法、工具和过程三部分组成。方法是进行航天虚拟操作分析的技术手段,它支持航天器生命周期中各个阶段活动,如设计、验证、评价和维护等,尤其是设计阶段,它是全面检查涉及方案优劣的重要手段。航天虚拟操作分析工具是航天器设计者在开发航天器的活动中智力和体力的扩展和延伸,它为航天器研制工程中的操作性分析方法和体系管理提供自动的或半自动的软件实现途径。航天虚拟操作分析过程则是将航天虚拟操作分析工程的方法和工具综合起来合理、及时地进行航天器研制。过程定义了方法使用的程序、分析结果的形式、需交付的文档资料、为保证分析质量所需要的管理活动等。
航天虚拟操作分析必须针对航天环境的特殊性展开,具体表现在:
(1)航天失重环境对人体生理方面的影响。其基本影响包括:钙丧失、体液转移、前庭功能改变,由此导致在失重环境下人体的身高增加近3%;人体抗重力肌肉处于松弛状态,身体的自然姿势改变为适应失重特征的自然状态;肌肉萎缩和骨质疏松,肌肉工作能力下降、硬度降低以及下肢围径减小,长期飞行会导致航天员工作和运动后十分疲劳。
(2)热环境对航天操作的影响。热环境是决定航天员热舒适性的重要因素之一,座舱加热、循环和冷却系统会影响航天员的热平衡和舒适性,影响因素包括气体的温度、湿度、气流速度、热辐射等气体环境参数。在进行航天操作时,会导致皮肤温度升高,随后核心温度会升高,血管开始扩张、出汗,不能完全代偿身体的热负荷。
(3)振动环境对航天操作的影响。振动会产生生理作用、生物力学作用以及烦恼等心理反应。振动可与噪声协同作用,引起应激效应和疲劳,降低警觉、影响操作。另外,无论目标振动、人体振动还是目标与人体同时振动,都会使视网膜成像模糊,振动对视觉的影响与视距离有关。
(4)噪声对航天操作的影响。当噪声存在时,会发生语音被淹没的现象,这会妨碍航天员对其他声音的感觉。给定频率的声音会掩蔽相邻频率的信号,使信号完全不能被听到。由于噪声对语言通信的干扰,会使航天员的工作效率降低。
航天虚拟操作分析具有以下几个方面的特征:
(1)层次性。根据载人航天器人机界面对象层次的不同,工效学评价工作可在不同层次上进行,如被评价的对象可以是单机、在轨可更换单元(ORU)、子系统。对系统进行整体评价是最终和最重要的评价,但这种评价绝对脱离不了其它层次上的数据支持。
(2)综合性。操作性分析应该根据具体的操作形式进行综合展开,全面评价各种操作的人体工效特性,不能忽略某些重要的操作要素。比如在狭隘的空间中需要进行手柄操作,需要综合分析可视性、可达性、操作空间、人体受力特性等,如果遗漏了某个方面,则分析评价的结果不全面、可信度降低。
(3)阶段性。操作性评价应在载人航天工程进展过程中的不同时期进行,如从方案、初样直到正样阶段都要进行相应的工效学评价,及时发现并解决问题,最大限度地操作性方面存在的薄弱环节以及潜在的技术风险。
(4)个体差异性。由于虚拟分析一般采用某个特定测量学参数的航天员模型,对于其它航天员,所得到的结果一般会有一定的差异。另外,由于人体是较为复杂的多自由度系统,即便是对于同一种操作可能会有多种可行的操作姿态,不同人的操作习惯也不一样,虚拟操作性分析得到的结果自然不同。
(5)结果形式多样性。虚拟操作性分析根据分析对象和内容的不同,得到的结果可以是定量的,也可以是定性的;既可能是图形化的,也可能是表格、文字形式的;既可能是模糊的,也可能是精确的。
(6)参考性。虚拟分析所采用的模拟环境、人体测量学参数、操作样式和实际相比一般会有一定的差异,会导致虚拟分析结果不一定很精确,只能作为一定的参考,一般情况下不能替代水槽和飞行试验。相对而言,模型越精确、操作形式越精准、人体模型及其属性越科学全面,则分析得到的结果参考性越强。
2.2 外延
航天虚拟操作分析技术的外延就是指具有其所反映的本质属性的对象。相对于人的经验和图纸检查等传统的分析手段,它是一种利用计算机软件技术带来的革命性变革,是航天器及其运行维护系统设计工程的一个分支,强调航天操作分析不能单纯依靠航天器设计者的个人经验、技巧或创造性,而应该利用一整套严谨、科学的技术体系实施分析和评价的工程项目,在给定航天器设计方案或者维护任务的前提下,开发出具有可理解性、可追踪性、可验证性和可修改性等特点的技术手段,并能给出是否满足航天在轨操作需求(包括功能需求和非功能需求)的评价结果。
(1)应用范围。就航天器对象而言,虚拟操作分析技术可以应用于所有载人航天器的人机界面设计,以及可实施在轨维护和服务航天器对象的被操作对象。就应用过程而言,它一般是应用于航天器的设计阶段,包括概念设计、原理样机设计阶段,也可以应用于初样、正样等需要修改设计、评估任务的阶段,在进行物理实验之前进行模型分析和评价。
(2)研究目的。主要是对航天操作的任务或者航天器的设计方案进行评价。若以任务为分析对象,则分析任务的可实现性、消耗的时间和人力参数;若以航天器人机界面为分析对象,凡是需要进行操作(包括安装、拆卸、检查、更换等)的ORU、子系统、系统,检查其设计、布局的合理性,给出分析结果、评价结论甚至是改进建议,最终目的是使得航天器重要人机界面在空间微重力环境中易操作。
(3)技术手段。进行虚拟操作分析一般有两种途径:一是全虚拟的方法,利用航天器数字样机和虚拟人模型进行实现,即“虚拟人操作虚拟样机”,它不需要真实人的参与,这种方法代价低、实现方便;二是基于虚拟现实的办法,“真实人操作虚拟样机”,它同样不需要航天器的物理样机,真实人通过数据手套、力反馈器、位置跟踪器等虚拟外部设备来进行模拟操作,实现操作性的分析和评价。
3 技术分类
基于当前的虚拟操作技术的发展水平[3],从人机交互的深度来分析,它包括以下三种。如图1所示。
(1)演示性虚拟操作
通过计算机显示终端观看操作动作,了解、分析以三维动画形式来表达的操作过程。这种方法实现较为简单、成本较低,可通过成熟的软件工具如CATIA、JACK等进行制作,但缺点是缺乏对操作过程的深入分析,不能反映出每个操作的人体工效参数。根据有无人体模型,它包括两种:一是仅仅通过三维的数字样机来编辑生成操作动画,告诉人们如何进行操作;二是通过虚拟人来仿真基本的操作过程,如图2所示。
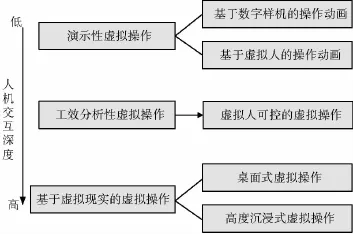
图1 虚拟操作分析的三类实现方式
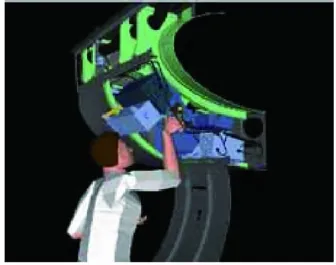
图2 演示性虚拟操作
(2)工效分析性虚拟操作[3]
主要是指在虚拟操作过程中,构建全虚拟的操作环境和虚拟人模型,虚拟人在虚拟环境中同操作对象进行交互,控制虚拟人的姿态和动作来完成操作过程。这种方式由于虚拟人完全受程序的控制,可以进行各种动作的工效学分析,兼顾了良好的可分析性和展示性。系统的基本构成如图3所示。
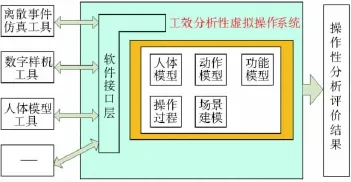
图3 工效分析性虚拟操作
(3)基于虚拟现实的虚拟操作
这种方式引入虚拟现实的外部设备来控制人体模型动作,即人在回路的仿真方式,属于“真实人员操作虚拟产品”。人沉浸于虚拟环境中,能感受周围的操作环境,能逼真体验操作过程,主要根据人的亲身感受来对操作过程进行评价。根据用户参与虚拟现实的形式以及沉浸程度的不同,它包括两种:
一是桌面式虚拟操作,它利用个人计算机和普通工作站进行仿真,将计算机的屏幕作为用户观察虚拟境界的窗口。通过各种输入设备实现与虚拟现实世界的充分交互,包括鼠标、追踪器、力矩球等。这种方式有一定的沉浸感,但仍然会受到周围现实环境的干扰,成本中等,有一定的应用。
二是沉浸式虚拟操作系统,它利用头盔式显示器或其他设备,把参与者的视觉、听觉与其它感觉“封闭”起来,提供一个虚拟的感觉空间,并利用位置跟踪器、数据手套以及其它手控输入设备,使得航天员产生身临其境、全心投入和沉浸其中的感觉[5]。这种方式能完全逼真反映操作环境,操作的真实感最强,它是一种最为高端的虚拟操作实现方式,代表未来虚拟操作的发展方向,存在的缺点是成本高昂。其基本技术框架如图4所示,包括硬件系统、软件系统、软硬件接口以及仿真驱动系统等组成部分。
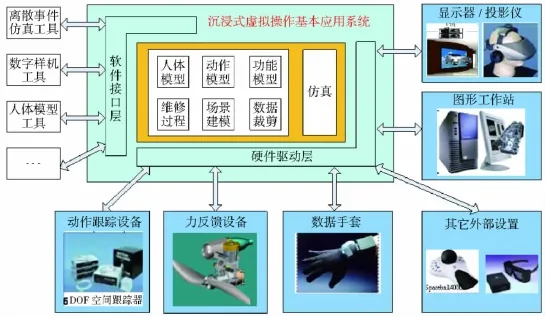
图4 沉浸式虚拟操作的系统基本技术框图
4 虚拟操作分析的驱动模型
航天虚拟操作分析有两种驱动模型:一是以任务为目标的虚拟操作分析,重点评价任务的成功性;二是以航天器为中心的虚拟操作分析,重点评价航天器人机界面设计的合理性。其中前者更为实用,但由于任务是难以穷举的,所以分析的难度和工作量更大。以下分别进行探讨。
(1)以任务为目标的虚拟操作分析驱动模型
其目的是对操作任务进行可行性分析,以保证所有的操作任务能够被成功执行,这是操作任务分析评价的最高层次。如图5所示。任务主要是根据载人航天器使用和维护的总要求来确定。首先需要对总的任务计划进行分析和分解,列举出所有的子任务,然后建立每个子任务的操作流程,再对每个操作单元进行虚拟操作性评价,得到局部的分析结果,最后根据操作流程综合得到操作任务的分析、评价结果。
(2)以航天器人机界面评价为目标的虚拟操作分析驱动模型
其目的是对航天器的人机界面进行分析,以评价设计的合理性,是否存在设计缺陷。它具有明显的层次性,分析的对象从下到上可能是单机、ORU、子系统、系统等,同时也包括相应的辅助设备、维修保障资源等,评价内容涵盖了人、机、工具、环境的协调性、整体性。对于每个人机界面,要分析各种可能的操作特征,比如人手的抓、拿、放、转等操作,要对这些交互特征分别进行分析。在得到局部、个体的分析结果之后,再逐步往上汇总、综合,得到子系统、分系统、系统级的分析评价结论。如图6所示。
对于这两种不同的分析驱动模型,在技术上都有很多相同之处,均需要得到每个具体操作的工效和时间分析结果,这也正是虚拟操作分析的重点和难点,在获取这些个体和底层数据后,进行综合分析和处理,可实现航天器整体人机界面还是航天任务的操作性分析评价。
5 航天虚拟操作分析的内容和技术体系
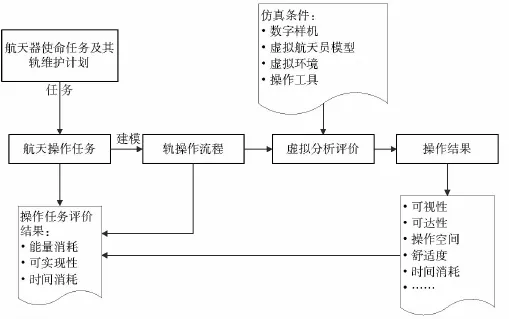
图5 以任务为目标的虚拟操作分析驱动模型
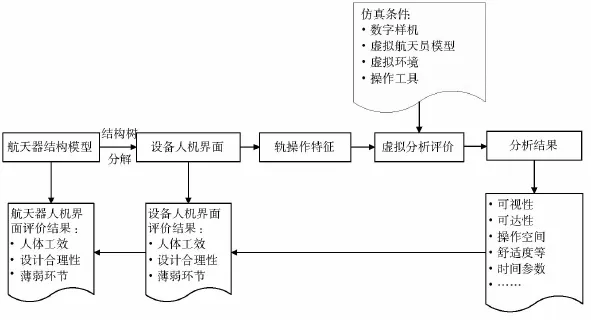
图6 以航天器人机界面评价为目标的虚拟操作分析驱动模型
以下分别从广义和狭义的角度探讨虚拟操作分析的研究内容。广义虚拟操作分析是针对各种操作任务需求,全面分析航天员操作的空间可达特性、力学和疲劳特性、生理反应等,实现航天器操作性的完备评价。而狭义虚拟操作分析主要是立足于目前的可行技术手段,以刚性人体模型为基础,一般分析人体可视性、可达性等基本属性,为航天器操作性的整体评价提供部分依据。
5.1 广义虚拟操作分析
从广义角度来说,虚拟操作分析可分为以下几个相互关联的研究内容。
(1)人的特性。在载人航天飞行过程中,航天员是整个飞行系统的主体、核心,一切由航天员监视、控制和操作的装置、部件,都要便于航天员使用;一切航天员接触到的环境因素都必须满足航天员的生理与心理要求。为达到此目的就必须需要研究航天员的心理、生理特性及操作能力、限度等诸多问题,如人体体力和耐力特性、人体活动范围、人体承受各种压力情况的心理及反应特性、人体信息获取与决策特性等。
(2)空间环境对人的影响。空间环境包括微重力、振动、冲击、噪声、温度、湿度、超重以及辐射等各种环境因素,这些环境对人体的影响机制较为复杂,并且存在各种短、长期效应,借助虚拟手段分析和研究对航天员工作能力和健康的影响,研究这些环境条件下人的耐力、特性的变化。
(3)工作负荷。航天员的工作负荷直接影响工作效率和健康状况,它指的是航天员操作时投入的体力和脑力的多少,决定于任务的轻重,同时与每个人的能力大小以及功能状态有关,而功能状态又受到环境、技能及心理状态的影响。虚拟操作性分析要研究在不同条件下、不同操作时航天员的人体负荷,寻求评价工作负荷的可靠、有效的方法。
(4)综合评价方法。航天器的设计是一项巨大的系统工程,航天操作任务往往非常复杂,对其进行操作性评价牵涉的内容、影响的因素众多。要在试验评估之前,给出层次化、综合化的虚拟分析和评价,全面检验设计方案的操作性特征。
5.2 狭义的虚拟操作分析
广义的虚拟操作概念比较宽泛,若以良好的技术可实现性以及适中的效费比等角度来考虑,特别是基于虚拟人和虚拟环境进行操作性分析,此时航天虚拟操作分析则为狭义的概念,它包括以下基本内容[6-8]。
(1)可视性分析功能。可以根据人体在微重力环境下的姿态生成可视锥,显示两眼的可视区域,并可对椎体参数进行调整。
(2)可达性分析功能。提供正向和逆向可达性分析,正向分析可显示人体手臂的可达几何体;逆向分析可根据手形和位置生成人体姿态。
(3)受力分析功能。支持空间操作任务分析当中常用的力和扭矩评价、脊柱受力分析、腰部受力分析、静态受力评价等。
(4)操作舒适度分析功能。根据失重环境下的生物力学—生理学模型,以及操作姿态、操作时间、受力大小等条件,进行关节舒适度评价、代谢能耗与恢复分析评价等。
(5)综合分析评价功能。根据建立的完整操作任务流程或者整个人机界面评价模型,采用层次分析法或综合加权法进行综合分析可以得到全局的评价结论。
5.3 支撑技术
航天虚拟操作分析是一门具有较强应用性和针对性的技术,是多学科和多领域技术的交叉融合的边缘科学,与许多学科有着密不可分的关系。从一般层面来讲,它以航天工程、系统工程、医学工程等学科作为支撑,同时融合了人因分析、航天器设计等领域的专业技术。其支撑技术体系如图7所示。
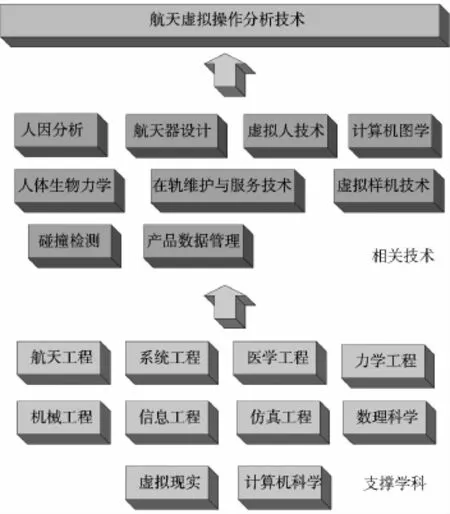
图7 航天虚拟操作分析支撑技术体系
研究和应用航天虚拟操作分析技术,必须建立在这些理论和技术基础之上,缺一则不完整。应充分借助该技术体系开展技术研究和探索,突破航天虚拟操作分析方法,开发虚拟操作分析软件工具。
6 结束语
本文主要对航天虚拟操作分析的基本概念问题进行了研究,分析了航天虚拟操作分析技术的内涵、外延、技术分类和驱动模型等,探讨了广义和狭义虚拟操作分析的研究内容。
下一步将着重针对航天环境对于航天员及其操作的影响,系统研究人体建模和动作仿真、可达性和舒适度评价的技术方法,在此基础上研制具有我国自主知识产权的航天虚拟操作分析软件工具,为提高航天器人机界面的操作性设计水平提供支撑。◇
[1]Christie Bertels.Crew Maintenance Lessons Learned from ISS and Considerations for future Manned Missions,2006,35.
[2]马冶家,周前祥.航天工效学.国防工业出版社,2003.
[3]刘鹏远,李瑞,张锡恩.某型武器系统虚拟操作训练系统.计算机工程,2003,29(18):180-182.
[4]N I Badler,C B Phillips,B L Webber.Simulating Humans:Computer Graphics,Animation,and Control.London:Oxford University Press,1999.
[5]周前祥.虚拟现实技术在航天工效学中的应用进展.计算机仿真,2001,18(2):8-14.
[6]Abdel-Malek K,Yang J,Brand R,Tanbour E.Towards Understanding the workspace of the upper extremities.SAE Transactions– Journal of Passenger Cars:Mechanical Systems,2001,110(6),2198–2206.
[7]Patrick C,Damien C,Christophe Le R.A distributed approach for access and visibility task with a manikin and a robot in a virtual reality environment.IEEE Transactions On Industrial Electronics,2003,50(4):692-698.
[8]W.P.Neumann.Inventory of Human Factors Tools and Methods,http://www.ryerson.ca/hfe/,2007.
