100%低地板车牵引变流系统控制技术
2012-09-17陈德文刁利军
陈德文 董 侃 刁利军
(1.长春市轨道交通集团有限公司 长春 130000;2.北京交通大学电气工程学院 北京 100044)
100%低地板车牵引变流系统控制技术
陈德文1董 侃2刁利军2
(1.长春市轨道交通集团有限公司 长春 130000;2.北京交通大学电气工程学院 北京 100044)
介绍我国首列完全自主研制的100%低地板车牵引变流系统的组成及其牵引控制技术:采用先进的矢量控制技术来实现独立轮转向架牵引电机的控制,控制性能良好;分析列车控制功能的实现机理和相互之间的逻辑关系,给出了载荷调整、防滑/防空转等重要的列车控制策略。给出现场试验波形,验证其良好的牵引控制性能。
城市轨道交通;100%低地板车;牵引系统;矢量控制;防滑防空转
1 轻轨车辆优点
轻轨交通(light rail transport,LRT)是铁路运输的一种,又称轻轨捷运、轻轨铁路,简称“轻轨”,泛指所有在道路、街道上面或旁边行走的电车以及多节的铁路列车[1]。与地铁相比,轻轨交通具有以下突出的优点[2-4]。人性化、建设成本低、周期短:低地板轻轨车客室的地板面低,只需要很低的站台,可方便老人、小孩上下车,轻轨在土建成本上远低于地铁,建设周期也短得多。噪声低:轻轨不会对周边环境产生太大的影响。景观和谐:由于基本不需要建设隧道和高架,所以不会对城市环境和景观造成破坏,与城市建设相结合,反而给人一种和谐之美。节能:没有因为隧道而增加的环控设备费用和二次能源消耗。灵活适应运量变化:轻轨车“短小精悍”,可以更好地应对高低峰时刻客流反差引起的编组变更问题。
依托国家“十一五”科技支撑重点项目“100%低地板车研制”,以北车长春客车股份有限公司、北京交通大学、北车大连研发中心、北车永济电机厂为主要合作单位,成功开发研制出我国首列具有完全自主知识产权的100%低地板轻轨车(见图1),掌握了以下关键核心技术:独立轮动/拖车转向架、轻量化铝合金车体、牵引变流器、辅助逆变器及充电机、牵引电机、列车网络监控系统、多模块铰接装置等关键技术[5]。下面从系统组成、电机控制技术、车辆控制、运行试验结果等方面,介绍由北京交通大学负责研制的牵引变流系统的控制技术。

图1 我国首列100%低地板轻轨车
2 牵引变流系统
2.1 变流系统组成
如图2所示,整车变流系统由牵引系统TSYS1和TSYS2组成,每个变流系统包括1套牵引变流器TCU(traction control unit)、1套辅助变流器。牵引变流器主要用于将直流电转换成可变频变压的交流电,对牵引电机进行控制;牵引控制采用1个逆变器控制1个牵引电机的1C1M方式,同时完成车辆控制和电机控制功能。
2.2 变流系统功能
整个变流系统与列车独立轮转向架的纵向布置电机对应,牵引变流系统采用1C1M模式,系统功能包括牵引电机驱动、车辆控制、网络监控等,如图3所示。

图2 变流器系统组成

图3 牵引变流系统功能
牵引变流系统接收司控台的给定指令,通过先进的矢量控制技术,将750 V直流电压变换成电压幅值及频率可变的交流电压来控制牵引电机,实现列车的牵引/制动功能。通过CANOpen网络与列车控制单元(vehicle control unit,VCU)配合,同时通过硬线的直接输出,实现对列车的逻辑控制,包括防滑控制、制动配合等。通过以太网络与电脑的通信,可实现对变流系统的直接监控、故障数据下载和诊断以及现场调试功能,具有友好的人机接口。
2.3 控制系统结构
为了实现完善的电机控制、车辆控制及网络监控功能,变流系统的控制采用双数字信号处理器DSP和现场可编程门阵列FPGA结构,软件控制采用分层方式,如图4所示。
1)顶层:主要由DSP1完成系统的监控、诊断、显示及其他低速控制功能,并实现与司控台和VCU以及人机接口的通信,控制周期为ms级。
2)中层:由DSP2实现主要的电机控制算法和信号逻辑控制,采用高级语言C或C++实现,控制周期为几十到几百μs。
3)快速控制:由FPGA完成,包括系统级保护、数据交互、信号测量等功能,周期一般小于100 μs。
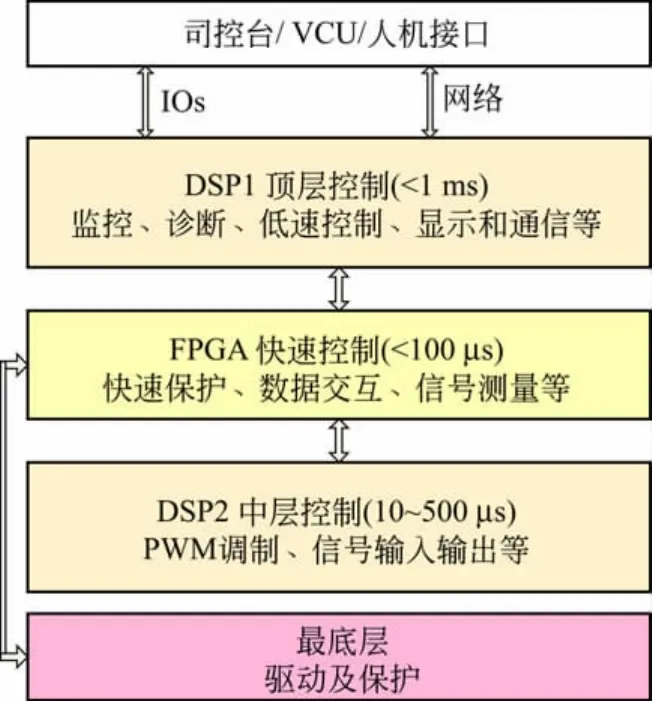
图4 控制系统结构
4)驱动层:主要实现功率单元的驱动和保护功能,速度最快。
3 牵引电机控制
轻轨车采用3对极的异步感应电机,由于其具有非线性、强耦合、时变等特点[6],为了得到良好的控制性能,最后采用了以矢量控制策略为主的电机控制技术。
3.1 矢量控制原理
控制原理如图5所示[7]:采样定子两相电流,通过三相静止/两相旋转的Park变换,得到定子^电流的同步旋转dq轴分量id、iq,计算得到转子磁链ψr。司控器手柄给出参考牵引力,经过列车牵引特性曲线及牵引力,由电机转矩转换后得到电机转矩给定值,经Iqcal模块得到转矩分量的给定量i*q;由转矩分量给定i*q和转子磁链计算得到给定转差频率,加上转子频率后积分得到转子磁链的位置角θe,作为下次旋转变换的变换角。把转子转速送入弱磁单元得到转子磁链给定值,对实际值进行PI1运算后获得定子电流的励磁分量给定值。将转矩分量给定i*q和励磁分量给定i*d分别与实际采样值iq和id相减,经PI3运算后得到dq坐标系的电压分量 uds、uqs,与耦合分量 udcc、uqcc相加后,得到经前馈解耦后的电压控制信号u*ds、u*qs,送入空间矢量调制模块,得到脉冲信号,送给电压型逆变器进行电机控制。
3.2 实际试验结果
图6给出了实际列车牵引/制动时牵引电机的试验波形,图7给出了采用矢量控制的列车运行波形,从图中可以看出,牵引电机实现了励磁分量和转矩分量的良好控制,列车牵引制动稳定。

图5 牵引电机矢量控制原理

图6 牵引电机矢量控制试验波形
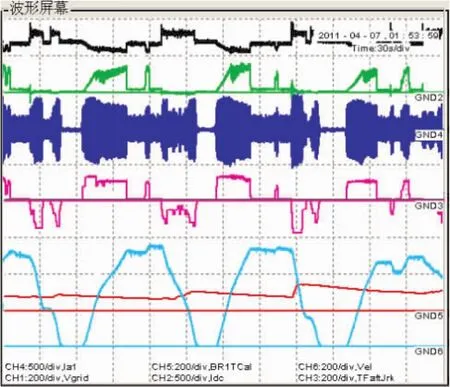
图7 列车正常运行时电机控制相关波形

图8 TCU状态关系转换
4 车辆控制
车辆控制主要是根据司机给定指令和车辆的工况进行控制,以维持列车稳定、可靠运行。车辆的启动、运行、关闭均由牵引控制单元(traction control unit,TCU)控制,TCU的几种控制状态的转换关系如图8所示,各种状态动作如下:
1)待机(IDLE):当直流侧电压大于500V时,辅助逆变器运行正常,TCU进入IDLE状态,等待充电指令。
2)准备(READY):当网侧电压在满足运行范围时(500~900 V),检测司控器指令;当有充电命令时,对直流母线电容充电。充电完后,TCU进入READY状态,等待运行指令。
3)运行(RUN):充电完成后,根据司控器指令,控制列车牵引、制动运行,TCU进入RUN状态。
4)故障(TRIP):当检测到故障时,TCU进入TRIP状态。TCU会相应地封锁脉冲,断开线路接触器,给出故障信号。TCU存储故障信息后,重启再运行,进入IDLE状态。
考虑各种因素,可以认为整个车辆的控制逻辑是一个由各种约束组成的串联结构,如图9所示。

图9 车辆控制逻辑
其中,“系统执行状态机”表示列车的行驶方向(向前、向后、无方向或方向切换)和牵引、制动、惰行以及限速、洗车、倒行等状态的判断和执行;在此基础上,根据列车速度和司机给定的牵引力指令,通过“牵引特性曲线”得到初步的给定牵引力;然后考虑车辆载荷、系统状态以及冲动、防滑等因素,得到最终的给定牵引力,由牵引系统控制牵引电机达到期望的控制效果。“系统限制”主要考虑在系统异常的情况下适当降低牵引力,以保证系统在异常状态不恶化的情况下保持列车的持续运行,主要考虑过温(变流器、电机、空气等过温)、同一转向架的轮径差太大、超速、轮径异常、网压异常等因素的影响。“冲动控制”主要具有以下作用:获得平滑的给定,限制牵引/制动的功率突变以减小EMI,减小对电网的冲击。对于路权独立或带平交路口的线路,轻轨车的冲动率一般控制在1.0 m/s3以内;而对于共享路权的线路,则可以控制在2.0~3.0 m/s3。冲动控制的实现,将通过调节牵引力或制动力的上升/下降斜率来进行。载荷调整及防滑/防空转的控制原理将在后面论述。
4.1 载荷调整功能
载荷调整的主要作用是:根据实际车辆载荷的变化,适时调整给定牵引力,以保证列车牵引制动的平稳性,一般按照比例进行调整,如图10所示。

图10 载荷调整后的车辆控制逻辑
载荷调整必须符合以下原则:每站间只进行一次载荷修正及运算调整;在未知载荷的情形下,默认采用AW2载荷参与运算;如果有隔离的或关闭的TCU模块,将负载修正系数设置到100%,以模拟最大负荷;在高速段,由于车辆阻力存在,将负载修正系数设置到100%,以补偿阻力。
4.2 防滑/防空转控制
牵引系统的防滑/防空转模块用在不利的轨道条件下,以提高加速和减速的性能,具有以下任务:充分利用轮轨黏着力;防止牵引时驱动轴的空转,以及制动时驱动轴的滑行;减少车轮和轨道的磨耗。
防滑/防空转保护由TCU执行,且此控制功能仅对动车施加,制动时拖车的滑行保护由制动控制单元BCU执行,其基本原理如图11所示。对动车两个电机的速度和拖车速度进行测量,并将其传输到TCU牵引控制单元中,再对测量值进行比较,以获得参考车速;TCU连续监控参考速度和动车电机的旋转速度,如果有差值,则牵引力就自动减少,以满足轮轨黏着力;如果轨道条件变好,摩擦系数变高,那么牵引力将按照一定的斜率(可调节)提高到轮轨黏着力。这种通过限制牵引力矩来抵消滑行和空转的方法,被广泛应用于轻轨系统。

图11 防滑/防空转基本原理
当TCU无法获取参考车速时,使用无参考速度的防滑/防空转模块,将根据动车电机的加速度进行保护。
为了验证列车防滑/防空转的控制效果,将肥皂液或混合剂洒在列车前进方向侧车轮踏面的轨面上,使受试车辆具备产生空转或滑行的条件。测试时,使用最大牵引级位,使列车达到40~70 km/h的速度,然后使用最大制动力停车,获得的试验波形如图12所示。可以看出,被控电机速度与参考速度的差异较小,控制效果良好。

图12 防滑/防空转试验波形
5 结语
我国第一列100%低地板车已在长春轻轨正线完成了5 000 km的中试试验,充分说明了所研制的牵引变流系统设计合理,具有良好的电机控制和车辆控制性能,为车辆的稳定、可靠运行提供了重要保障,也为我国完全自主创新、自主研发的低地板车技术装备的发展和竞争提供了有力的支持。
[1]Glossary of transit terminology.Online Publications and Databases[R].American Public Transportation Authority,2008.
[2]王渤洪.现代低地板轨道车辆创新走行部[J].机车电传动,2009(2):44-47.
[3]邹婷婷,李莉.阿尔斯通公司展示Citadis轻轨车模型[J].国外铁道车辆,2009(1):6.
[4]王欢,戴焕云.低地板轻轨车辆的技术分析与自主研发选型[J].中国铁路,2009(10):56-59.
[5]刘志刚.100%低地板车牵引传动系统研究及装备研制[J].都市快轨交通,2010,23(5):17-21.
[6]Bose B.K.Modern power electronics and AC drives[M],Harlow:Prentice - Hal,2002.
[7]刁利军.电力推进负载模拟系统研究[D].北京:北京交通大学,2008.
Control Technologies of Traction Converter for 100%Low-Floor Vehicles
Chen Dewen1Dong Kan2Diao Lijun2
(1.Changchun Railway Group Co.,Ltd,Changchun 130000;2.School of Electrical Engineering,Beijing Jiaotong University,Beijing 100044)
Abstract:This paper introduces the composition and traction control functions of the traction converter system for the first domestic 100%low-floor vehicles,which were innovated by ourselves with the complete proprietary intellectual property right.Advanced vector control was adopted for motor control of independent-wheel bogie with good performance achieved.The train control theory and logic relation were also analyzed,such as load regulation,anti-slip/slide control,etc.The onsite experimental wave forms validated the good performance of traction control.
Key words:urban rail transit;100%low-floor vehicle;traction system;vector control;anti-slip/slide
U266.2
A
1672-6073(2012)04-0111-05
10.3969/j.issn.1672 -6073.2012.04.027
收稿日期:2011-07-02
2011-08-1
作者简介:陈德文,男,副经理,工程师,从事城市轨道交通电力牵引及电力电子技术与传动研究,ljdiao@bjtu.edu.cn
“十一五”国家科技支撑计划重点项目(2006BAG02B00);北京市科技计划项目(D101100049610001)
(编辑:郭 洁)