直升机旋翼流场特性PIV试验分析
2012-09-16中航工业直升机设计研究所江西景德镇333001总参陆航部驻景德镇地区军事代表室江西景德镇333002
(1.中航工业直升机设计研究所,江西 景德镇 333001;2.总参陆航部驻景德镇地区军事代表室,江西景德镇, 333002)
李春华1,曹金华2,吴裕平1
0 引言
旋翼是直升机的关键部件,其流场特性与直升机性能、载荷、振动、品质和噪声等密切相关[1],是直升机空气动力学必须解决的关键问题之一,也是直升机研制的基础。在当前旋翼非定常理论分析存在困难的情况下,PIV试验[2-3]是旋翼流场特性研究的关键技术手段之一。
欧美各国在旋翼流场试验研究方面取得了较好的进展[4-5],尤其是随着激光测速技术的日益成熟,已发展成为复杂流动研究的重要手段。借助于LDV和PIV技术,国外开展了一系列旋翼流场试验[5-6],获得了大量的旋翼桨尖涡结构和发展历程的试验数据,并以此修正和改进了自由尾迹、CFD等旋翼非定常分析方法[7-8]。而在国内,PIV技术目前主要应用在定常流方面的试验研究[9],对于旋翼非定常流场的试验分析开展得相对较少。
本文针对高性能的模型旋翼开展了在悬停和前飞状态下的旋翼PIV试验研究,获得了不同试验条件下的旋翼诱导速度分布以及桨尖涡的运动轨迹,为旋翼非定常流动研究提供试验支持。
1 试验设备与模型
1.1 旋翼模型
模型旋翼桨叶的桨尖形状为抛物线后掠型,4m直径,实度0.1,桨叶平面形状见图1。

图1 模型旋翼示意图
1.2 主要试验设备
1)PIV系统:包括照明激光器、同步控制器和高速数字相机。
2)Φ4 m旋翼机身组合模型试验台[7]:由台架系统、动力系统、测量系统、操纵控制系统、主轴倾斜系统、数据采集处理系统、监视报警系统及振动监视系统等组成。
3)粒子发生器[9]及粒子扩散装置:粒子发生器主要由液体供应系统、温度控制系统、压缩气供应系统以及蒸发器组成[8]。粒子制备上采用技术成熟的乙二醇/丙二醇粒子制备方案。
4)粒子投放移测架:为Y、Z向两自由度移测架,安装电控系统,便于精确控制和定位,可满足旋翼流场粒子投放要求。
5)六自由度移测架:由于测量位置变化,前飞试验时用到六自由度移测架,激光器或摄像头安装在姿态调整机构上,可实现α、β、γ的变化。在安装摄像头的机构上,可适当调整摄像头位置,以保证最佳的图像捕获效果,位置确定后,姿态调整机构在调整角度过程中保持激光器与摄像头之间的相对位置不变。
1.3 试验状态
试验分为悬停和前飞两种状态。
1)悬停试验
悬停PIV测量试验时,在地面悬停间,使用直升机尾桨试验台随动系统作为PIV测量的支撑平台,采用粒子投放移测架作为粒子发生器及粒子扩散装置的支撑平台,而模型安装、试验转速及总距等参数的变化则是通过Φ4 m旋翼/机身组合模型试验台加以实现,试验方案示意图如图2所示。
2)前飞试验
前飞风洞试验时,选用8m×6m风洞作为试验研究平台,使用六自由度移测架作为PIV测量的支撑平台,采用粒子投放移测架作为粒子发生器及粒子扩散装置的支撑平台,而模型安装、试验转速及总距等参数的变化则是通过Φ4 m旋翼/机身组合模型试验台加以实现,试验方案示意图见图3。
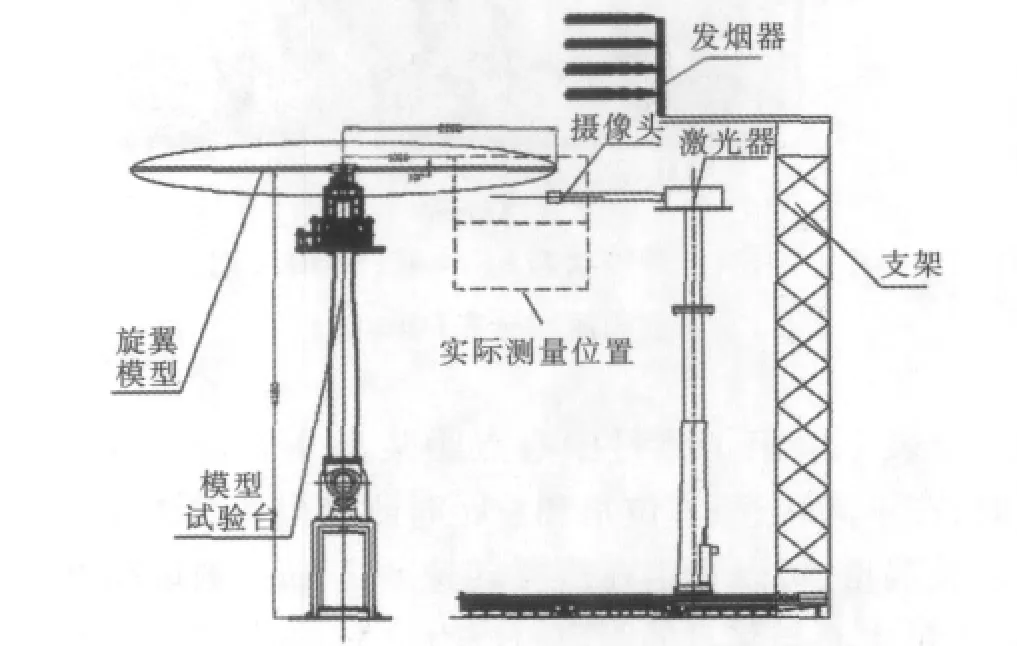
图2 地面悬停PIV流场测量试验方案示意图

图3 风洞PIV流场测量试验方案前视图
2 试验数据处理及分析
2.1 悬停状态
图4、图5给出了悬停时不同测量剖面的流线图。可以看出旋翼下洗诱导速度分布较为规则,表明旋翼获得的升力比较稳定。悬停状态桨盘平面靠近桨尖位置有较大下洗流,尾迹边界呈收缩趋势,即桨尖涡不但有向下运动趋势,且受径向指向桨毂中心的诱导速度的影响,并逐渐收缩成一个半径比桨盘半径小的螺旋形涡柱面。在较强桨尖涡作用下,在桨尖以外的区域,会诱导气流上洗。流线图也清楚地显示了桨尖涡的形状和变化过程,由于受桨尖附近形成的强集中桨尖涡影响较大,桨尖附近的诱导速度随桨尖涡变化的趋势较敏感。

图 4 悬停状态 θ0.7=4°、H=0.2 时剖面流线分布(Φ=0°)
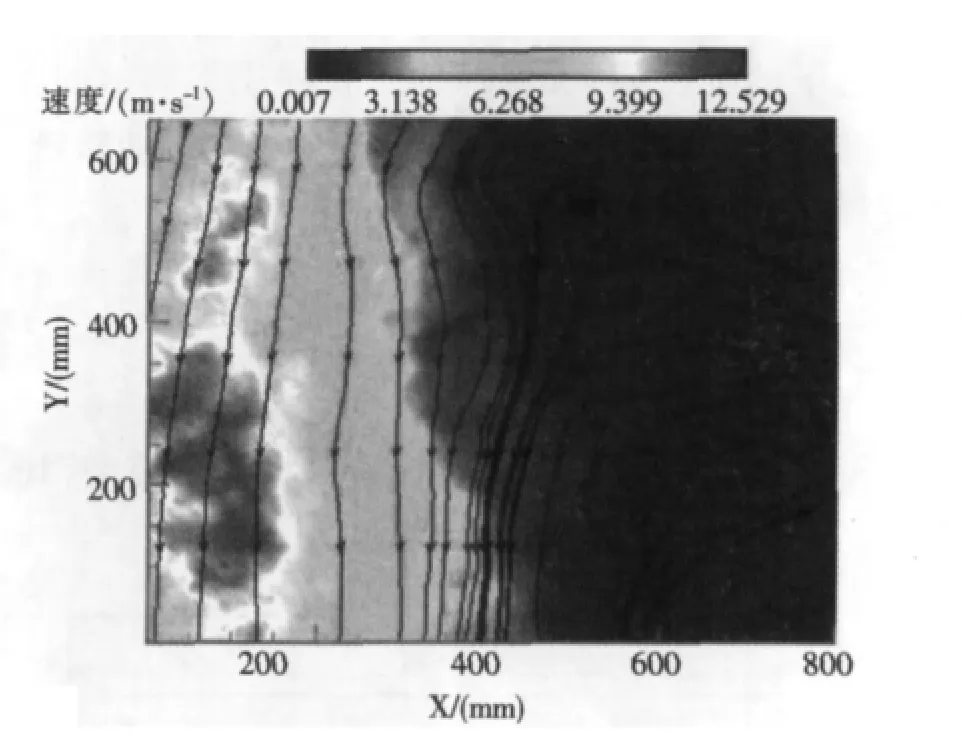
图 5 悬停状态 θ0.7=4°、H=0.8 时剖面流线分布(Φ=0°)
表1给出了测量中心点距桨盘0.2 m、0.8 m时,在不同转速、方位角和总距时测量得到的诱导速度及涡量,可以看出在旋翼转速877 rpm、测量高度(测量中心与桨盘的距离)H=0.2 m、方位角φ=0°位置,当总距 θ0.7=6°,10°时,产生的诱导速度分别为 16.6 m/s,36.9 m/s,桨尖涡最大涡量为 401/s,1546/s。而旋翼转速增加到1032 rpm、测量高度H=0.8 m、方位角 φ =0°,当总距 θ0.7=6°,10°的情况下,产生的诱导速度分别为 16.8 m/s,29.2 m/s,桨尖涡的最大涡量为200/s,606/s。表明随总距的增加,诱导速度和桨尖涡的强度也逐渐增大。
在同一试验状态下,随着测量高度的降低,即旋翼尾迹距离桨盘越远,诱导速度会逐渐变小,并且桨尖涡开始逐步耗散,强度逐渐减弱。如总距θ0.7=6°、测量高度 H=0.2m、方位角 φ =0°,在旋翼转速为877 r/min,1032 r/min时,产生的诱导速度分别为16.6 m/s,20.5 m/s,最大桨尖涡涡量分别为401/s,597/s。因此,随着转速的增加,诱导速度和桨尖涡强度逐渐增大。
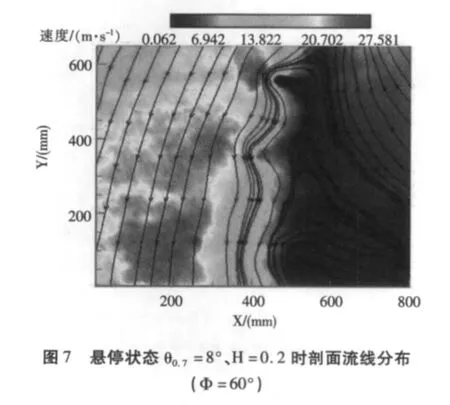
图6和图7给出了诱导速度和桨尖涡强度随方位角的变化情况,随着方位角的增大,桨尖涡逐步向下移动,强度逐渐减弱,旋翼尾迹螺旋线的螺距约为200 mm。

表1 悬停旋翼试验状态及PIV测量结果



2.2 前飞状态
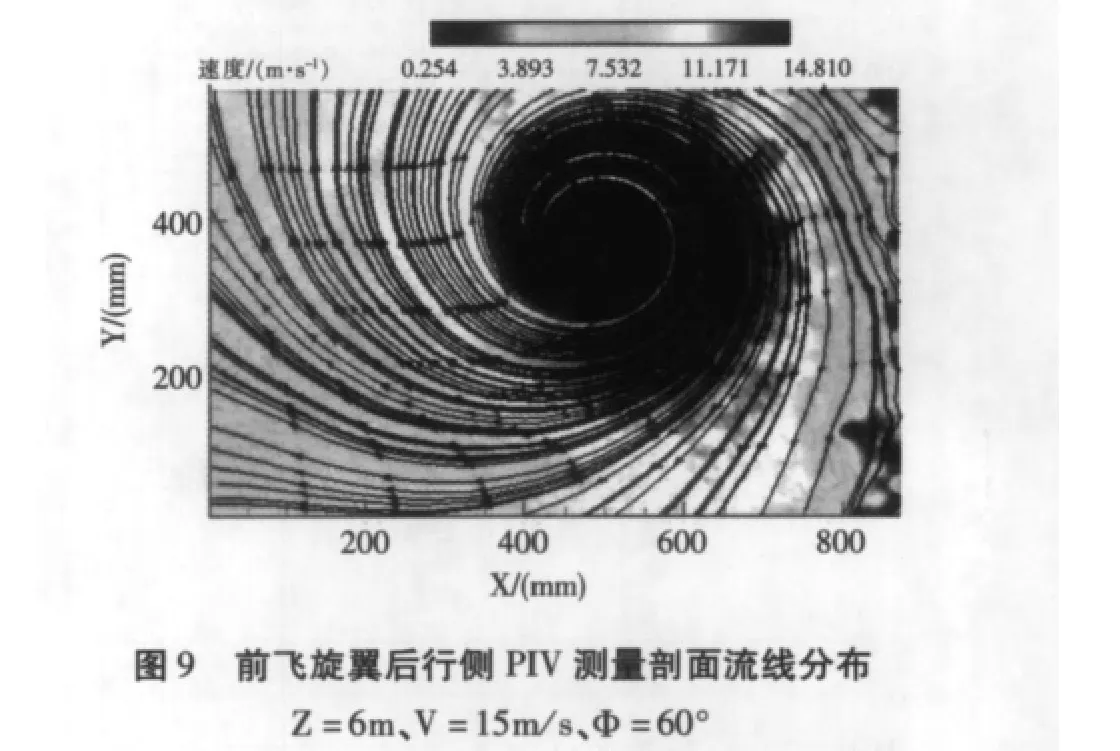
图8、图9分别给出了前飞试验时,后行、前行侧测量剖面的流线图。可以看出前飞时,在桨尖附近涡的卷起集中趋势明显,受来流与诱导速度影响,桨尖集中涡向后向下运动,且会逐渐耗散。
图10给出了在不同试验条件下,方位角φ=0°时涡量值随流向(Z)位置的变化关系。可以看出:相同试验条件下,旋翼两侧产生的涡量值基本相当。尾迹距离越远,两侧产生的涡的绝对值就会越小,并且在超出桨盘半径后(即Z≥2 m),产生的涡量约为一定值。在前行桨叶一侧,风速越高,产生的涡量值越小;在后行桨叶一侧,风速越高,产生的涡量值越大。另外,同一风速条件下,拉力系数越大,前行桨叶一侧的涡量值越大,而后行桨叶一侧的涡量值动态变化的规律性不够明显。
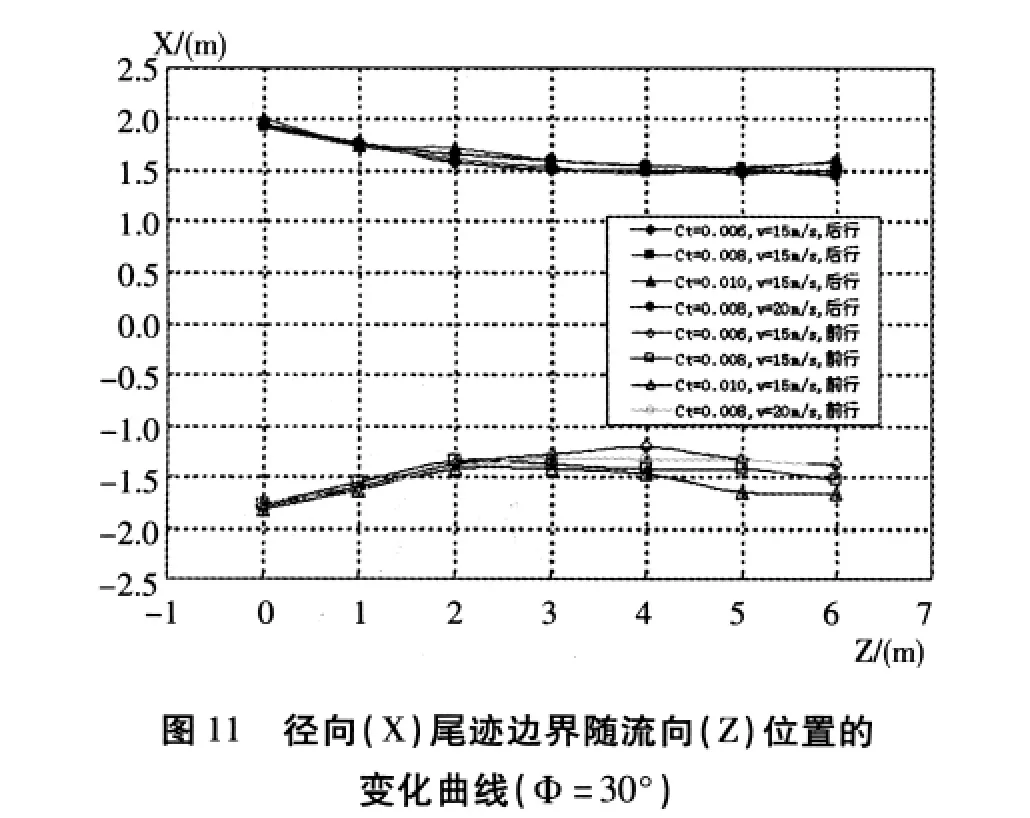
图11给出了在不同试验条件下,方位角30°时,径向(X向)尾迹边界随流向(Z)位置的变化关系。可以看出:前飞状态下,旋翼尾迹沿径向的收缩很急剧,并且两侧的收缩范围不同,前行桨叶一侧最大收缩至0.65 R,后行桨叶一侧最大收缩至0.78R处。另外,在相同试验条件下,径向边界随拉力系数的增大而收缩范围变小,而且,风速越大,收缩范围越大。
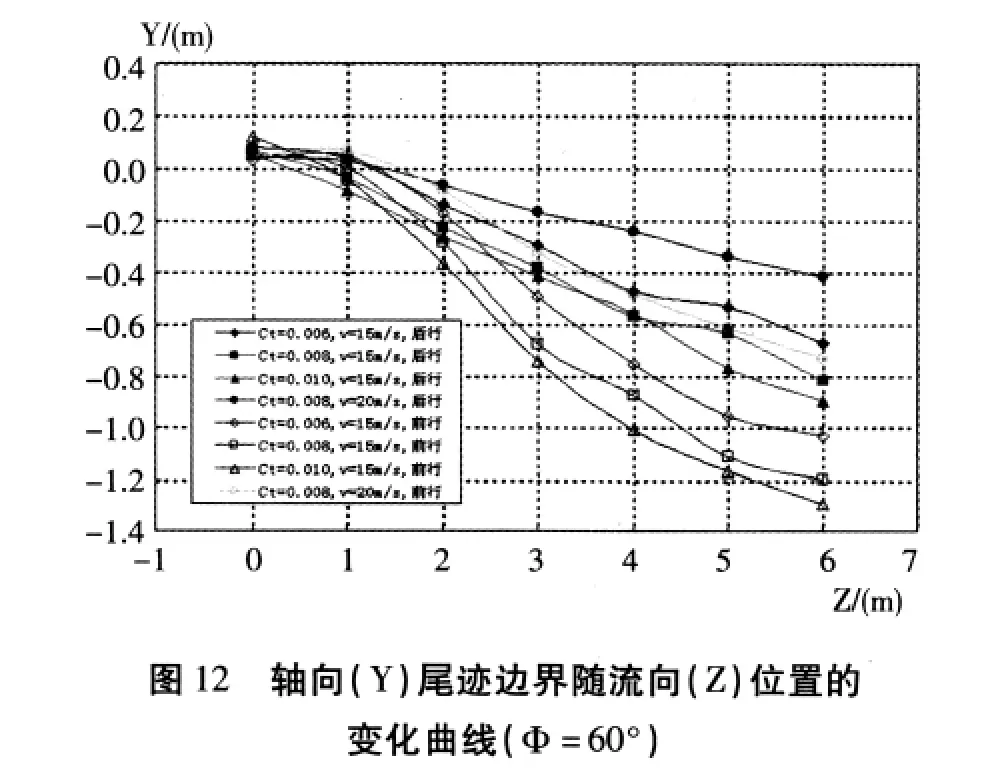
图12给出了在不同试验条件下,方位角60°时,轴向(Y向)尾迹边界随流向(Z)位置的变化关系。可以看出:前飞状态下,旋翼尾迹沿流向逐渐下降,下降距离与流向距离成线性关系。在相同试验条件下,前行桨叶一侧的下降距离比后行桨叶一侧的要大,其次,拉力系数越大,轴向边界的下降距离越大。另外,风速越大,轴向边界的下降距离越小。
3 结论
1)悬停状态下,随着旋翼转速和总距的增加,诱导速度和桨尖涡的强度逐渐增大。随着轴向距离的增加,诱导速度先增大,之后相对稳定,然后逐渐减小,桨尖涡逐步耗散,涡的强度逐渐减弱。
2)悬停状态,旋翼下洗诱导速度分布较规则,桨尖涡尾迹边界分明,收缩明显。随着涡龄角的增加,桨尖涡向下移动,强度逐渐减弱。旋翼桨尖涡形成螺旋线,螺距与下洗速度相关。
3)前飞状态,旋翼两侧的尾迹涡量值基本相当,尾迹的涡龄角越大,尾迹越耗散。前飞状态下,风速越高,前行桨叶一侧的涡量值越小,后行桨叶一侧的涡量值越大;拉力系数越大,前行桨叶一侧的涡量值越大。
4)前飞状态,旋翼桨尖涡会沿径向收缩。试验结果表明:随拉力系数的增大,径向尾迹边界收缩变小,而风速越大,收缩范围越大;前行侧最大收缩至0.65R,而后行侧最大收缩至0.78R处。
5)前飞状态,旋翼尾迹受下洗诱导速度影响会向下运动,下降的高度与流向距离呈近似线性关系。拉力系数越大,下洗速度越大,尾迹下降高度也越大;风速越大,下洗速度相对来流的比值越小,同样流向位置测量的尾迹下降距离也越小。
[1]Johnson W.Helicopter Theory[M].Princeton:Princeton University Press.1980.
[2]Santiago J G.PIV Measurements of a Microchannel Flow[J].Exp Fluids.1999(05).
[3]Elliot J W,Althoff S L,Sailey R H.Inflow Measurements Made with a Laser Velocimeter on a Helicopter Model in Forward Flight,Volume III:Rectangular Planform at an Advance Ratio of 0.30[R].NASA TM 100545,1988.
[4]Vatistas G H.New Model for Intense Self-Similar Vortices[J].Journal of Propulsion and Power,1998,14(4):462–469.
[5]Swanson A,Light J S.Shadowgraph Flow Visualization of Isolated Tiltrotor And Rotor/Wing Wakes[C].Proceedings of the American Helicopter Society 48th Annual Forum,1992.
[6]Leishman J G,Bagai A.Challenges in Understanding the Vortex Dynamics of Helicopter Rotor Wakes[J].AIAA Journal,1998,36(7):1130–1140.
[7]Bhagwat M J,Leishman J G.Correlation of Helicopter Tip Vortex Measurements[J].AIAA Journal,2000,38(2):301–308.
[8]Jain R,Conlisk A T.Interaction of Tip-Vortices in the Wake of a Two - Bladed Rotor in Axial Flight[J].Journal of the American Helicopter Society,2000,45(3):157–164.
[9]杨永东,武杰.悬停旋翼桨尖涡的试验研究[J].实验流体力学,2008(09).