基于多传感器数据融合的喷水推进泵空化分类识别
2012-09-15苏永生王永生段向阳
苏永生,王永生,段向阳
(海军工程大学 船舶与动力学院,武汉 430033)
由于多传感器数据融合技术可以对同类或异类的多传感器信息进行协调优化和综合处理,将各传感器在空间和时间上的互补与冗余信息依据某种优化准则组合起来,从而减小信息的模糊性,扩展时间和空间覆盖面,克服单个传感器的不确定性和局限性,提高系统的可信度,因此在现代测试信息处理中得到了越来越广泛的应用[1-5]。
本文针对喷水推进泵实船空化测量环境的复杂多变性,利用多传感器数据融合技术对测试信号进行时间和空间上的融合,提高喷水推进泵空化分类识别的准确度。
1 喷水推进泵实船空化测量
整个测量系统由传感器,信号调理模块,数据采集卡,便携计算机以及相应的分析处理软件组成,其组成结构如图1所示。
试验中通过测取喷水推进泵内的水声信号和泵壳体振动信号来确定泵的空化状态,同时测取泵轴转速和航速信号。航速通过422串口从计程仪引入,转速通过HE-01霍尔式转速传感器测取,水声信号通过RHS-30水听器获取,振动信号通过PCB加速度传感器测取。数据采集卡采用了NI的PXI系列板卡,其中PXI-4472用来采集振动和水声信号,PXI-6251用来采集转速信号,PXI-8431/2用来采集航速信号。所有信号同步采集,其中水声信号和振动信号采样率分别设为 102.4 kHz和 51.2 kHz。
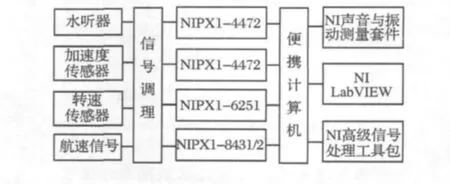
图1 测量系统组成示意图Fig.1 Schematic diagram of measurement system composition
试验船安装有四台喷水推进泵,由于喷水推进船在部分泵工作时容易进入空化区,试验中主要测取了两内泵工作在无空化Ⅰ区、空化Ⅱ区和空化Ⅲ区三种工况,试验测量工况如图2所示。图中的三条空化限制线由泵厂家提供。

图2 试验测量工况Fig.2 Operating conditions for the test measurement
2 多传感器数据融合方法
由于实船测试环境的复杂性,测试信号难免受到各种噪声的干扰。再加上空化信号的随机性和瞬时性,使得空化特征捕捉的难度进一步加大。受安装环境的限制,实船测试时每台泵对应的位置只安装了一个水听器和一个加速度传感器。为了更准确的获取空化特征,首先对单类传感器的信号在时间上进行融合,即选取某一稳定工况下单传感器N个时段的数据作为N个传感器的输出,依照某种规则对其进行数据级融合,然后分别提取两类传感器各自的特征,再将两类传感器的特征组合起来进行特征级融合,最后根据融合结果进行分类识别[6]。数据融合的结构如图3所示。

图3 多传感器数据融合示意图Fig.3 Schematic diagram of multi-sensor data Fusion
2.1 基于奇异值分解的多传感器数据融合算法
由于空化发生后,会辐射出强烈的噪声并诱发振动,此时水声信号和振动信号的能量都会增加。但空化的发生具有一定的随机性和瞬时性,不同时段的数据可能包含不同程度的空化信息,分析时选取不同时段的数据可能会得到不一样的结果。如果采用传统的时域平均方法,可能会消弱空化的特征信息,特别是对于空化初生阶段的微弱特征可能无法获得。为此,分别将各稳定工况下水听器和加速度传感器的某一段测量数据分成N个不同时段,归一化后作为输入矩阵的N列向量,对该输入矩阵进行SVD分解,得到N个大小不同奇异值,这些奇异值的大小反应了各段测量数据的能量分布[7]。根据奇异值的大小分别赋予各段数据相应的权值,奇异值大的赋予较大的权值,奇异值小的赋予较小的权值,根据各段数据的权值进行数据级的融合,这样估计出的结果将有效地综合考虑空化的随机性影响,能更好的反映出空化的特征信息。
假设水声信号和振动信号分别为ai和vi(i=1,…,N),经奇异值分解后得到的奇异值分别为 σai和σvi,则对应的权值分别为:
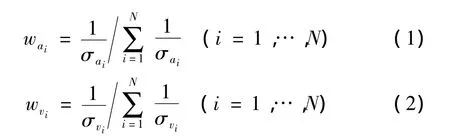
融合后的水声信号和振动信号分别为:

2.2 基于人工神经网络的特征分类识别方法
相对于传统的线性或简单的非线性分析方法,人工神经网络由于其较强的自适应性和自学习能力,在模式识别等应用领域得到了广泛的应用。本文利用神经网络对喷水推进泵的空化状态进行分类识别。如图4所示,首先提取融合后的水声信号和振动信号的特征,然后将所有特征组合起来作为神经网络的输入项,最后根据神经网络的输出判别分类识别的结果。

图4 基于神经网络的分类识别方法示意图Fig.4 Schematic diagram of ANN-based classification method
3 喷水推进泵空化分类识别
根据上述方法,分别选取各稳定工况下水声信号和振动信号的10 s数据,将其平均分成5个时段,作为5个传感器的输出,经奇异值分解后计算其权值,如表1所示。

表1 各时间段数据的权值Tab.1 The weights of each time slice
根据奇异值分解得到的权值分别对水声信号和振动信号进行数据级融合,然后分别提取各自的空化特征。研究表明,高阶导数可以凸显出信号的微小变化,有利于空化特征的提取[8]。针对声压信号和振动信号及其二阶导数序列,空化特征集的选取如表2所示。
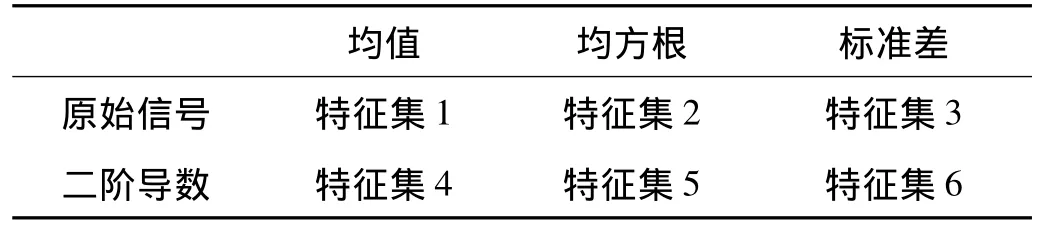
表2 空化特征集组成Tab.2 Composition of cavitation feature sets
将水声信号和振动信号的上述特征量组合起来作为神经网络的输入进行分类识别,输入层节点数为12。三种工况信号对应的输出分别记为[0,1]、[1,0]、[1,1],输出节点数为2。为了对比单传感器分类识别和多传感器数据融合分类识别效果的差异,分别将水声信号和振动信号各自的特征作为神经网络输入进行分类识别,对应输入层节点数为6。同时,为了说明基于奇异值分解的数据融合算法的有效性,将其分类识别结果同未经融合的分类识别结果进行对比,其中未经过奇异值分解的权值为0.2,采用奇异值分解后选用计算得到的权值。
分别采用BP网络和RBF网络作为状态分类器进行特征级融合处理。BP网络的隐含层层数和RBF网络的径向基函数分布密度经多次训练后择优选取。每工况取100个样本作为训练样本,另外取40个样本作为测试样本,总的训练样本和测试样本分别为300和120。网络训练满足要求后,对测试样本进行分类,分类识别的结果如表3~表6所示。
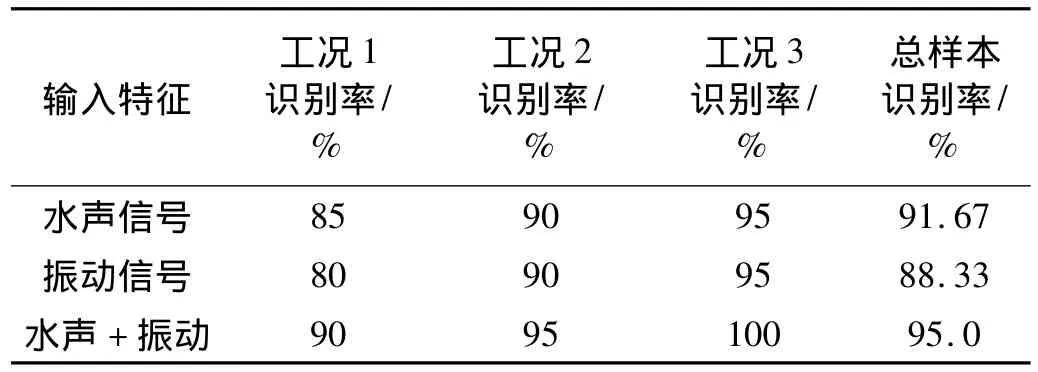
表3 未经奇异值分解的BP网络识别结果Tab.3 Recognition rate based on BP network without SVD

表4 未经奇异值分解的RBF网络识别结果Tab.4 Recognition rate based on RBF network without SVD

表5 基于奇异值分解的BP网络识别结果Tab.5 Recognition rate based on BP network with SVD
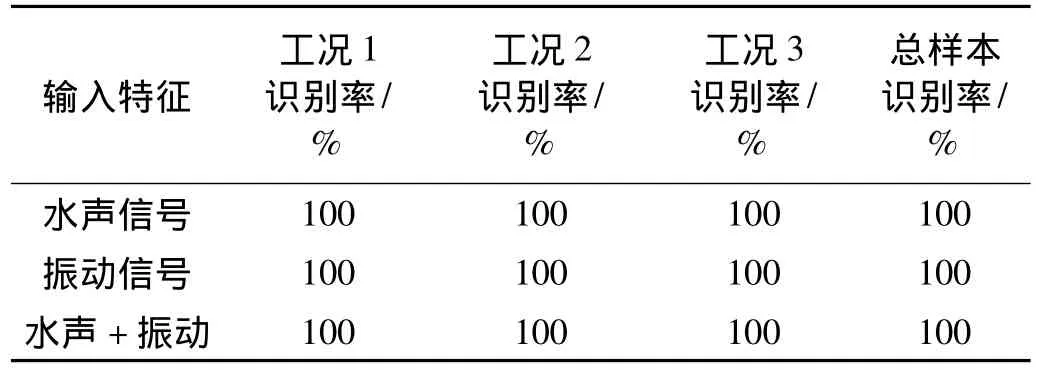
表6 基于奇异值分解的RBF网络识别结果Tab.6 Recognition rate based on RBF network with SVD
就单一传感器特征融合和多传感器特征融合来说,采用水声信号和振动信号组合特征的分类识别结果都要优于单一采用水声信号或振动信号特征融合的结果。即使没有经过奇异值分解融合,基于两种神经网络的多传感器特征融合的分类识别率均达到了95%以上。此外,单就各个工况小样本的分类识别结果而言,工况3的识别率明显要高于另外两个工况。这主要是因为工况3时空化已经发展到一定程度,空化特征比较明显,因此容易识别。而工况2处于空化初生阶段,空化特征还比较微弱,增加了识别的难度。
对比两类神经网络的识别结果可以看到,无论是否经过奇异值分解融合,基于RBF网络的识别率都要稍高于BP网络。值得注意的是,无论采用那种神经网络,经奇异值分解融合后的分类识别率明显提高,均达到96%以上,工况1和工况2的小样本识别率均有5%~10%的提高,尤其是基于奇异值分解融合的RBF网络分类识别率均达到了100%。由此可见,采用基于奇异值分解的权值算法将单传感器信号在时间上进行融合后,凸显了信号的特征,提高了信号的可信度,可以捕捉到微弱的信号特征,尤其适合于空化初生的检测和识别。
4 结论
本文结合奇异值分解融合算法和基于神经网络的多传感器数据融合方法对喷水推进泵的空化状态进行了分类识别,主要结论如下:
(1)对于喷水推进泵的空化状态识别而言,基于RBF网络的分类识别效果要优于BP网络;
(2)基于水声信号和振动信号的多传感器数据融合的分类效果明显优于水声信号或振动信号单一传感器的分类效果;
(3)经奇异值分解融合后,分类识别率有明显的提高,增加了对空化初生微弱特征的检测识别效果。
[1] 徐冬芳,邓飞其.基于多传感器数据融合的智能故障诊断系统[J].仪器仪表学报,2004,25(4):404-406.XU Dong-fang,DENG Fei-qi.Artificial fault diagnosis system based on data fusion algorithm[J].Chinese Journal of Scientific Instrument,2004,25(4):404-406.
[2] 黄建新.多传感器数据融合技术在轴承故障诊断中的应用研究[D].武汉:武汉理工大学,2006.
[3] 杨 雷.弱小目标检测与多传感器数据融合跟踪技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[4] Dalberg E,Lauberts A,Lennartsson R K,et al.Underwater Target Tracking by Means of Acoustic and Electromagnetic Data Fusion[C].9th International Conference on Information Fusion,Florence,Italy,2006.
[5] Li H K,Ma X J,He Y.Diesel Fault Diagnosis Technology Based on the Theory of Fuzzy Neural Network Information Fusion[C].6th International Conference of Information Fusion,Cairns,Queensland,Australia,2003.
[6] Hannah P,Starr A.Decisions in Condition Monitoring-an Examplar for Data Fusion Architecture[C].3rd International Conference on Information Fusion,Pairs,France,2000.
[7] 杨惠娟,张建秋.一种基于奇异值分解的动态多传感器数据融合算法[J].传感技术学报,2004,(3):440-445.YANG Hui-juan,ZHANG Jian-qiu.A SVD based multi-sensor data fusion algorithm[J].Chinese Journal of Sensors and Actuators,2004(3):440-445.
[8] Teder L,Pappel T.Detection of cavitation in pumps through higher order derivatives[C].4th International DAAAM Conference“Industrial Engineering-Innovation as Competitive Edge for SME”,Tallinn,Estonia,2004.
