基于Stewart平台的大柔性空间桁架结构振动控制
2012-09-15李伟鹏
罗 波,李伟鹏,黄 海
(北京航空航天大学 宇航学院航天飞行器与导弹技术实验室,北京 100191)
大柔性空间桁架结构的振动控制是航天动力学与控制领域的挑战性课题。大柔性空间桁架结构因具有集散简单、可靠性高、对任务适应性强等优点而在航天结构中得到广泛应用[1]。
空间挠性结构,如大型航天器展开式太阳阵,空间反射器、精密天线结构等,通常具有尺寸大、高柔性、低阻尼的特点,在轨运行时不可避免地将受到各种扰动,如姿态控制、轨道机动、停靠对接、机械设备运转等,从而引起结构振动。长时间的振动会影响航天器操作准确性,以及引起材料疲劳,所产生的噪音还将造成工作环境污染。上世纪70年代末期,美国军方和NASA为了提高航天器及其附件结构的稳定性和形状保持能力,提出了结构-控制一体化设计的思想,即智能结构。智能结构技术是解决上述问题的有效途径。智能结构在其传力路线中集成主动元件和传感器,可对平台系统在轨道状况感知,利用主动元件的动态调节,实现结构振动的快速抑制[2]。
Won等[3]将压电元件内置于空间桁架结构中,并且通过仿真和实验证明桁架前几阶模态振动能够很好地抑制下来。赵国伟等[4]搭建了柔性智能桁架结构,将多个作动器代替桁架的某些杆件,用作桁架的激励源和控制源,并采用LQG方法进行了振动控制实验。刘绍奎等[5]搭建了空间桁架悬挂系统,并将压电作动器安装在某根杆上作为控制源,进行桁架的自适应振动控制实验。文献[6-8]将压电片布置在悬臂梁的表面,进行了悬臂梁的振动控制研究。
这些智能结构的作动器和传感器通常分布于整个结构中,这样可较精确的测量结构振动且具备对高阶模态频率振动的控制能力。但如此布局在实际的空间应用中却存在诸多问题。一方面,布置在结构中的作动器和传感器势必影响结构的固有特性;另一方面,大型空间结构采用发射时收拢、入轨后展开的工作方式已成为趋势,若在此类结构中布置作动器、传感器势必对结构的正常收拢和展开过程产生影响,甚至造成展开失败。
本文提出的根部测控一体化策略,采用视觉测量系统在桁架根部对桁架振动进行非接触式测量,采用Stewart六杆并联平台固连在柔性桁架根部作为主动设备进行振动控制。无需在挠性结构中附加任何器部件,利于实现结构系统正常展开及关键部件集中防护。在挠性结构根部配置作动器杆系,对危害大、衰减慢的低阶模态频率振动抑制而言属于最优配置;挠性结构低阶模态频率振动的幅度较大、频率较低,在结构根部配置光学传感并辅以相应的解算方法可快速精确测量。
采用ADC自适应控制算法[9],并基于dSPACE实时仿真系统,搭建了振动控制实验平台。文中使用音圈电机激振器分别作为外扰和内扰,激发柔性桁架的低阶模态,通过视觉测量系统测得振动信号,采用Stewart平台在桁架根部对振动进行抑制。外扰低频谐振实验,桁架振动振幅衰减87.7%;内扰低频谐振实验,桁架振动振幅衰减91.8%。实验结果表明本文提出的桁架振动控制方案的有效性。
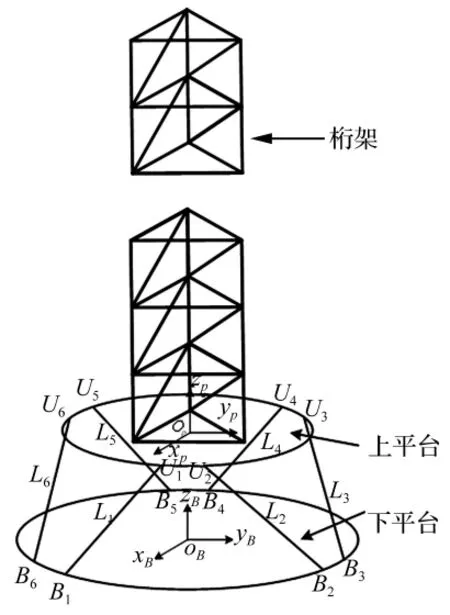
图1 Stewart平台-桁架系统示意图Fig.1 Stewart-truss system
1 桁架振动根部控制策略
目前,对航天结构振动主动控制的研究多采用智能桁架结构,即在桁架内部安置主动元件。但这样势必会影响可伸展桁架结构入轨后的正常展开。本文采用一种“根部控制”策略,即将 Stewart平台安置在桁架结构的根部作为其主动控制设备,桁架底部三个节点与Stewart平台的上平台固连,如图1所示。Stewart平台是一个具有六自由度运动能力的并联机构,具有刚度大、结构稳定、承载能力强、运动惯量小、动态特性好等特点,因此Stewart平台在隔振、跟踪方面具有广泛的应用前景。
Stewart平台上平板本体坐标系{P}的原点为Op,基向量分别为xp,yp,zp。惯性坐标系{B}固连在下平板,原点为OB,基向量分别为xB,yB,zB。桁架某一节点位置向量p与平台的位姿向量χ之间的动力学关系可以表示为:

其中:χ=[roxroyrozφ1φ2φ3]T,包括上平台的三个平动位移和三个转动角位移。可以通过控制上平台的位姿来达到控制桁架振动的目的。上平台的运动是通过驱动每根作动杆的伸缩来实现的。Stewart平台的上平台位姿与作动杆长度之间的运动学关系如下[10]:
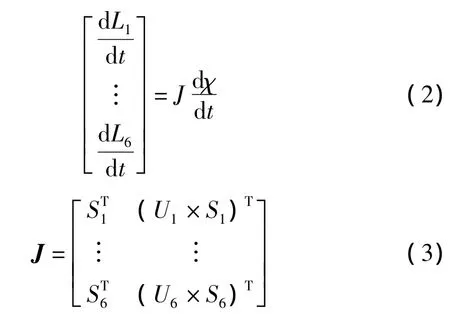
J称为平台的雅可比矩阵。Si,Li(i=1,…,6)分别为Stewart平台各作动杆的方向向量和长度。Si可以表示为:

式中:Ui,Si分别为各作动杆与上平板和下平板的铰接点在惯性坐标{B}下的坐标向量。
2 动力学模型
对于桁架平台系统,三棱桁架底部与平台通过三个节点连接。将桁架的每根杆看作只受拉压,不受弯矩作用的二力杆。将Stewart平台的上平板视为刚体,桁架视为柔性体,建立上平台-桁架系统的动力学方程。
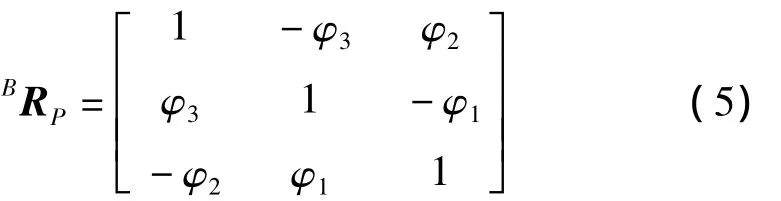
设从惯性坐标系{B}系经过旋转(1-2-3)(φ1,φ2,φ3)到本体坐标系{P}。在 φ1,φ2,φ3是小角度的情况下,从{P}到{B}的转换矩阵BRP为:
桁架某节点pk在桁架未变形时在{P}下的位置矢量为pk0=[xkykzk]T,结构变形后在{P}下的相对位移矢量为:Δpk=[ukvkwk]T。则点 pk在{P}中的位置矢量为:

点pk在惯性坐标系{B}中的位置矢量则为:
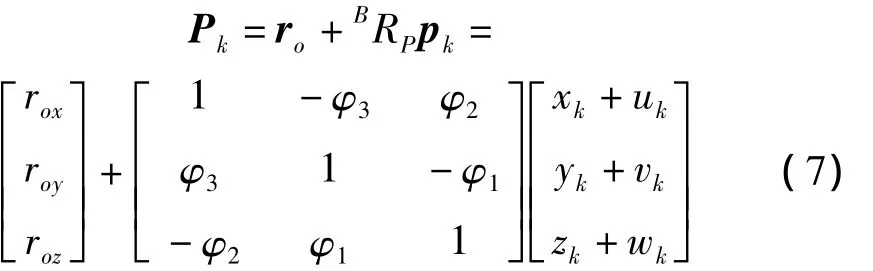
其中:ro是平台质心在惯性系下位置矢量。对位置矢量求导可得点pk的速度矢量:

桁架的模态振型、频率可用有限元软件得出。采用模态叠加法,则Δpk可以表示为:

式中:φxki,φyki,φzki为第 i阶模态向量在第 k 个节点沿三个方向的值,qi为模态坐标,N1为模态阶数。
系统的总动能为:
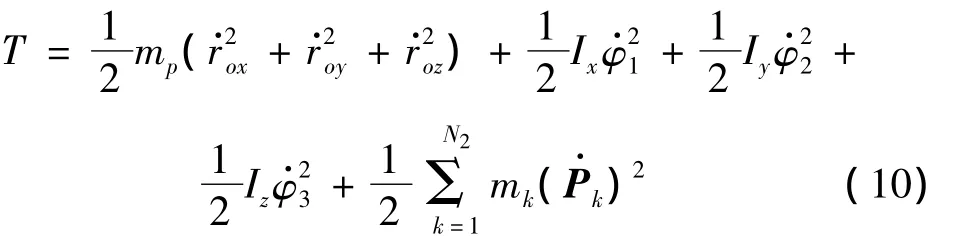
式中:mp,Ix,Iy,Iz分别为上平台的质量和三个方向的转动惯量。mk为第 k个桁架节点质量,N2为节点个数。
桁架的总势能可表示为:

其中:Δp为桁架总变形矢量,Φ为总模态矩阵,[K]为桁架的总刚度矩阵。

式中:α,β分别为控制输入uin(t)在ωd的频率处,经过Stewart平台和桁架环节后的增益与相位差。
LMS算法采用梯度的负方向作为权值迭代的方向。对目标函数,求权系数a(t)和b(t)的,可得柔性桁架的动力学方程:

其中:

[M]为桁架的总体质量矩阵。Φx,Φy,Φz分别为 xp,yp,zp方向上的模态矩阵。

再由平台和六根作动杆的运动学关系[10]:

式(12)可化为:

3 ADC控制方法
ADC控制方法是一种自适应控制算法,具有稳定性强,效率高的特点。它将与扰动信号频率相同的单位正弦、余弦信号作为参考信号,通过LMS算法迭代寻优找到两参考信号的权系数,从而叠加得到控制信号抵消干扰的影响,原理如图2所示[11]。

图2 ADC控制原理图Fig.2 Schematic of ADC method
图2 中,dv(t)为在频率为wd的干扰力fv作用下桁架产生的振动位移;dc(t)为在控制作用下桁架产生的振动位移;uin(t)为系统控制输入,e(t)表示桁架实际振动位移,其表达式如(15)所示。梯度可得:

则权系数的迭代关系为:

式(17)中:μ为算法的迭代系数。但是由于参数α,β通常是未知的,实时信号cos(wdt+β),sin(wdt+β)是不能得到的,于是将式(17)基于参考信号修改为:

上述迭代算法收敛稳定的条件为,μ满足下式:

杆和竖杆均长168 mm,杆直径为3 mm。桁架材料采用0Cr18Ni9不锈钢,弹性模量和泊松比为206 Gpa和0.3。为了降低桁架的固有频率,去掉了每层的一根斜杆,如图5所示。桁架的一阶模态频率为f1=2.01 Hz;
4 振动控制实验
4.1 实验系统介绍
本文主要进行了两个实验,即外部扰动和内部扰动谐振实验。振动控制实验系统如图3和图4所示,主要由柔性桁架、Stewart平台、CCD相机、点光源、Elmo控制器、激振器、图像采集处理系统、功率放大器、dSPACE实时控制系统和PC机组成。
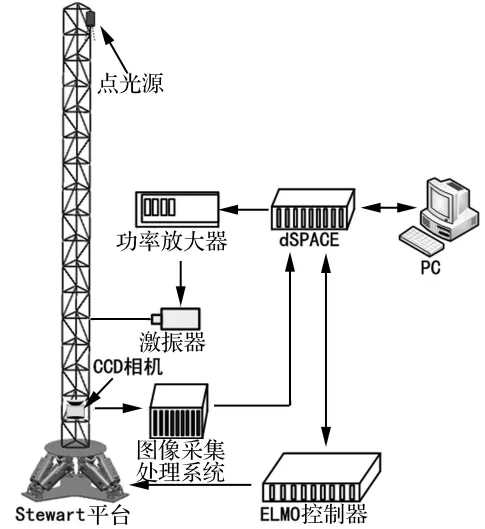
图3 外扰谐振实验装置示意图Fig.3 Device of resonance experiment with external disturbance

图4 内扰谐振实验装置示意图Fig.4 Device of resonance experiment with internal disturbance
柔性桁架的几何特性:为三棱柱桁架,共17层,总长2.85 m。每层3个节点,每个节点质量0.04 kg;横当把音圈电机安置在桁架顶部时,桁架的振动特性发生改变,一阶频率变为f1=1.54 Hz。

图5 桁架每层结构示意图Fig.5 Structural schematic of each bay in truss
所采用的Stewart平台由本实验室自行研制,是具有六自由度的六杆并联机构[12],如图6所示。平台上下平板铰接点的外接圆半径分别为:230 mm和535 mm;平台高度450 mm。平台上平板相对于下平板,绕下平板本体坐标系 X,Y,Z轴的转角范围分别为:-8.79°~8.78°,-8.79°~9.55°,-9.55°~9.55°;平动范围分别为:-42.0 mm ~42.0 mm,-37.2.0 mm ~37.2 mm,-37.0 mm ~35.0 mm。平台的工作频率带宽为0~20 Hz,能够有效地对桁架结构进行振动抑制。

图6 Stewart平台Fig.6 Stewart platform
激振器是本实验室自行研制的音圈电机作动器,具有无滞后,快速响应,体积小,控制方便等特性。在外扰谐振实验时,通过一根刚性杆与桁架某节点相连;内扰谐振实验时,将音圈电机安置于桁架顶部,如图7所示。功率放大器为江苏联能技术有限公司的YE5872A型,放大增益为0~7 V/V±2 dB,频率响应范围为0~50 kHz±1 dB。
振动的测量设备包括一个CCD相机和一个点光源。CCD相机为Honeywell的GC-755P-A3型,图像采集频率为25帧/秒,每帧图像41.3万像素。CCD相机安置在桁架的底部,点光源安置在桁架顶部,如图6、图7所示。

图7 桁架顶部配置Fig.7 Configuration on the top of truss
dSPACE实时仿真系统是由德国dSPACE公司开发的一套基于MATLAB/Simulink的控制系统及半实物仿真的软硬件工作平台。dSPACE硬件系统中的处理器具有高速的计算能力,并配备了丰富的I/O支持;软件环境功能强大且使用方便,可实现代码自动生成/下载和在线试验/调试等。
Elmo控制器是一种通用电机伺服驱动器,可用于控制各类直流电机、交流电机和直线电机,实验中用于激振器的速度环闭环控制,控制算法为PI控制。反馈信号为激振器上的光栅传感器,速度指令通过±10 V模拟量输入接口读入。
4.2 振动的视觉测量与校准
对桁架振动的测量,本文采用非接触式光学测量。在桁架底部安置CCD相机,通过一刚性支架与Stewart平台的下平板固连,如图6所示。CCD相机拍摄安置于桁架顶部的点光源,所成图像如图8所示。

图8 CCD相机拍摄光点所成图像Fig.8 Picture of point light taken by CCD camera
对图像中光点位置的识别采用灰度分析方法。定义图像中坐标为(m,n)上的像素 g(m,n)的(r+s)阶矩mrs为:

设置灰度阈值,将图像g(m,n)变为二值图像,即g(m,n)在光点区域值为1,在背景区域中值为0。按式(20)给出的定义,二值图像的0阶矩m00为g(m,n)的总和。对1阶矩m10和m01以m00标准化后,即可求出光点的重心坐标(x0,y0),即:

事实上采用双目测距原理,可以得到空间任意点的三维坐标。而本文光点的振动主要在平面内,为了使实验设备简单,只采用了一个CCD相机,这样视觉测量系统就只能得到光点在像平面的坐标,而不是实际振动的位移信息。于是本文采用加速度计对视觉测量系统进行校准。
将加速度计测得信号经过两次积分后的值y作为实际振动位移,它与光点在像平面的坐标可以表述为如下关系:

其中,通过最小二乘法求得参数a,b,c,d的值。图9为视觉测量信号经校准后与加速度计测得的实际振动信号比较。

图9 视觉测量与实际振动的比较Fig.9 Vibration Signal measured by CCD compared with accelerometer
4.3 振动控制结果
振动控制实验主要采用ADC方法对桁架的低阶模态振动进行控制实验。实验主要考虑了音圈电机激振器作外扰和内扰有两种工况。由于两种工况下桁架的低阶模态均为扭转,故在实验中采用Stewart平台的扭转自由度来控制被激发的桁架振动。
外扰谐振实验中,采用激振器通过一根刚性杆与桁架某一节点固连,通过控制器控制其产生正弦持续扰动激发桁架的低阶固有模态。ADC控制器采样频率1 kHz,第20 s开启控制。首先,考虑外扰情况下,利用前面建立的动力学模型作为被控对象,利用ADC控制方法作控制仿真,得到一个最优的控制器参数,其控制仿真结果如图10所示。然后利用仿真得到的控制器参数,做振动控制实验,桁架点光源处振幅衰减如图11所示,控制前振幅6 mm,控制后振幅在0.74 mm以内,振幅衰减87.7%。图12为外扰谐振实验中Stewart平台扭转角的控制量。
内扰谐振实验中,将激振器固定在柔性桁架的顶部作为桁架结构的一部分。通过控制器控制其产生正弦持续扰动激发桁架的低阶固有模态。ADC控制器采样频率1 kHz,第20 s开启控制。同样首先在考虑内扰情况下,利用前面建立的动力学模型作为被控对象,利用ADC控制方法作控制仿真,得到一个最优的控制器参数,其控制仿真结果如图13所示。然后利用仿真得到的控制器参数,做振动控制实验,图14为内扰谐振实验中,桁架点光源处振幅衰减结果,控制前振幅6 mm,控制后振幅在0.49 mm以内,振幅衰减91.8%。图15为内扰谐振实验Stewart平台扭转角的控制量。

图10 外扰谐振控制仿真结果Fig.10 Simulation result with external disturbance

图11 外扰谐振控制实验结果Fig.11 Experimental result with external disturbance
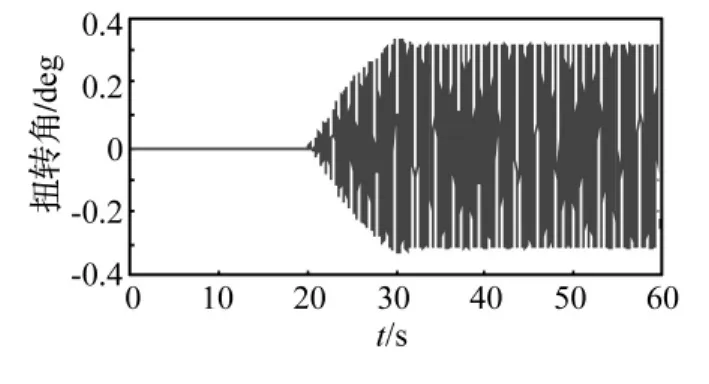
图12 外扰谐振实验Stewart平台扭转角控制量Fig.12 Angular of Stewart platform in experiment with external disturbance

图13 内扰谐振控制仿真结果Fig.13 Simulation result with internal disturbance
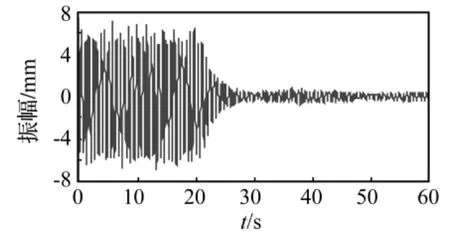
图14 内扰谐振控制实验结果Fig.14 Experimental result with internal disturbance

图15 内扰谐振实验Stewart平台扭转角控制量Fig.15 Angular of Stewart platform in experiment with internal disturbance
比较仿真与实验结果,二者存在一定的偏差,这是由于离线仿真采用的数学模型与实际存在偏差、实验设备误差、实验中不可避免的噪声干扰等综合影响决定的。从转角控制量可知,平台转角很小,说明动力学建模时,对转移矩阵进行线性化处理是合理的。
5 结论
本文针对空间大柔性被动桁架结构的振动控制问题,采用CCD相机作为振动测量设备,在柔性桁架根部安置Stewart隔振平台作为主动设备对桁架的振动进行控制,实验结果表明根部测控一体化策略的有效性。
设计了一种ADC自适应控制器,搭建了桁架内扰与外扰谐振实验系统,并分别进行了振动控制实验,结果表明外扰谐振实验振幅衰减87.7%,内扰谐振实验振幅衰减91.8%。实验中平台的转角控制量很小,从而证明对于低阶模态,主动设备根部配置属于一种优化配置,对实际工程应用具有一定指导意义。
[1]司洪伟,李东旭,陈卫东.大挠性航天桁架结构动力学及其主动控制研究进展[J].力学进展,2008,28(2):167-176.
[2]王加春,李 旦,董 申.机械振动主动控制技术的研究现状和发展综述[J].机械强度,2001,23(2):156-160.
[3]Won C C, SullaJL, SparksD W. Applicationof piezoelectric devices to vibration suppression[J].Journal of Guidance,Control,and Dynamics,1994,17(6):1333-1338.
[4]赵国伟,黄 海,夏人伟.柔性自适应桁架及其振动最优控制实验[J].北京航空航天大学学报,2005,31(14):434-437.
[5]刘绍奎,闫桂荣.基于自适应逆控制的空间桁架结构振动主动控制[C],第九届全国震动理论应用学术论文集,2007:220-226.
[6]魏燕定,陈定中,程耀东.压电悬臂梁振动的模态控制[J].浙江大学学报,2004,38(9):1180 -1184.
[7]吴大方,刘安成,麦汉超,等.压电智能柔性梁振动主动控制研究[J].北京航空航天大学学报,2004,30(2):160-163.
[8]Itik M,Salamci M U.Vibration control of a flexible beam by using sliding mode control[C].Proceedings of UMTS 2005 Congress,Kayseri,Turkey,June,2005:409 -414.
[9]Widrow B,Walach E.Adaptive inverse control.Upper Saddle River.Prentice Hall,1996.
[10]崔 龙.大行程Hexapod平台研制与控制研究[D].北京:北京航空航天大学,2009.
[11]Christian G R,Taranti,Agrawal B N.An efficient algorithm for vibration suppression to meet pointing requirements of optical payloads[R].AIAA 2001 -4094.
[12]崔 龙,黄 海.大行程Hexapod平台及其隔振实验[J].北京航空航天大学学报,2010,36(6):671-675.
