电动车用直流无刷电机电气制动方法研究
2012-09-12邢立成韩丰阳
邢立成,韩丰阳,赵 敏
(中北大学信息与通信工程学院,山西太原030051)
电动车用直流无刷电机电气制动方法研究
邢立成,韩丰阳,赵 敏
(中北大学信息与通信工程学院,山西太原030051)
根据直流无刷电机四象限运行的特性,对三种电气制动方式做了分析比较,并提出了低速时采取回馈制动和反接制动相结合的制动方法。仿真实验表明,在低速时反接制动可以补偿回馈制动的制动强度不足的缺点。
直流无刷电机;回馈制动;反接制动
无刷直流电动机在伺服领域以及电动车上得到广泛的应用。伺服电动机要求频繁起动和制动且动态响应快。 因为电动车使用直流电池供电,所以还希望在电气制动时充电,以增加续驶里程。电气制动的方式主要有能耗制动、反接制动和回馈制动三种[1]。但能耗制动不仅耗散能量,还需要耗能电阻,因此不常使用。反接制动虽制动转矩大,但要消耗电源能量。回馈制动可以回收能量,但是在低速时转矩不够大。使用者可以根据具体工况选择制动方式。这里采用回馈制动加反接制动。
1 四象限运行
无刷直流电动机伺服系统由电机、驱动器及位置传感器三部分组成。其中驱动器包括逆变器和控制器。逆变器主回路和电机连接原理,见图1。 图中,主电路由三相桥式电路构成。直流电源供电[2]。
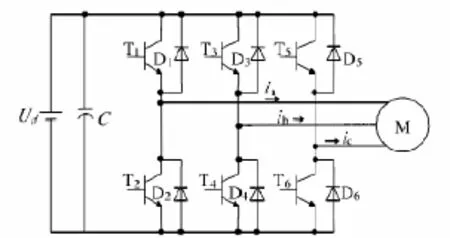
图1 逆变器主回路和电机结构图
电机工作原理是根据电机holl信号选择换相,见表 1。每次换相有两个管子导通,且使用PWM_ON导通方式。

表1 电动运行时霍尔信号与功率管导通状态
状态关系则由数学模型
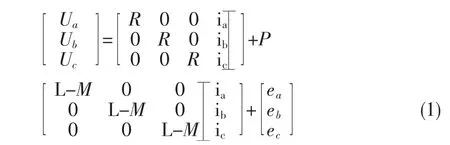
式中U(a/b/c)为电枢三相电压,ia/b/c为电枢电流,P为微分算子,R为电枢等效电阻,L为电枢电感,M为电枢互感及三相绕组电流数学表达式

可得反电势表达式为

式中:覬m为磁通;Ce为电机电势常数;ω为电机的角速度。其中电磁转矩Te为

式中,CT为转矩常数;E为电动势;I为电枢电流由式(1)~(4),可得无刷电机的机械特性表达式为:

图2给出了直流无刷电机四象限运行的机械特性MI~MIV。其中,I~IV象限分别表示正转电动、正转制动、反转电动和反转制动[2]。
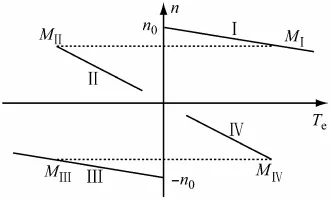
图2 四象限运行的机械特性
2 能耗制动
能耗制动就是突然切断电源电压,并在电枢回路中串入电阻R。切换的瞬间由于转速n不能突变,即电动势E不变,因此电枢电流为:

由于Te〈0,n〉0,转矩起制动作用,所以电机减速。
在以上制动过程中,系统的机械功率一部分由电机空载损耗掉,一部分转化为电磁功率通过制动电阻损耗,这会造成能量的浪费。
3 反接制动
反接制动方式需要直流电压源提供制动电流。在制动过程中,称电机反电势产生的电流为再生电流,电源输出的电流称为反接电流,两者之和即为制动电流[4]。在反接制动的初期,电源电压和反电动势的作用下,相电流迅速减为零,而后反向,形成制动电流。文献[4]指出在反接制动时采用双管调制可以通过控制占空比以获得制动力矩脉动最小。
在换相时控制占空比为

可以使换相时制动力矩脉动最小。
反接制动时能够更快地停车,但是要消耗电源功率,且要保证制动过程中制动电流不能太大。
4 回馈制动
4.1 回馈原理
这里采用半桥调制升压斩波原理,即只有上半桥或下半桥上的3个元件有PWM输出,另半桥上的3个管子保持截止。以下分析当VT2管有PWM则,一个周期中电枢线圈中存储的能量和释放的能量相等时,一个PWM周期T内的电流与能量的关系。图4为一个周期内的电流波形。
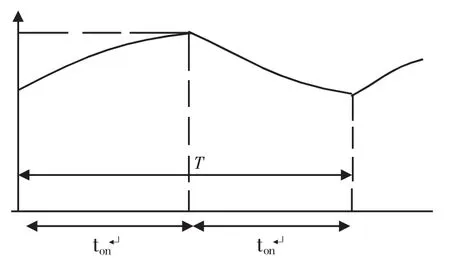
图3 一个PWM周期电流波形


这种升压斩波回馈制动方式的制动力矩与电枢电流成正比,它可能达到的最大制动转矩与电机的转速成正比。
4.2 半桥调制回馈制动控制方式
电机制动时需控制充电电流iBr。反电势越大,则充电电流越大;占空比越大,则充电电流也越大[5]。因此在回馈制动时,通过设定值与电机当前实际转矩的差值,利用PID调节器调节 PWM的占空比,从而控制iBr的大小,使制动转矩跟随给定转矩的参考值变化,实现制动转矩的控制。
5 制动方法改进
实际中,当电机转速较高时,回馈制动的充电能力较好;当电机转速下降到一定程度时,由于系统的机械能变小,使得电机的制动转矩下降,此时的PID调节器处于饱和状态。
为了满足电机制动时的快速性,以及制动时的转矩要求,可采用回馈制动与反接制动相接合的方法。该方法的原理是给定一个回馈制动的临界转速nbr,当转速高于nbr时,采用回馈制动;当转速低于nbr时,采用反接制动。文献[3]中对此种方法做了仿真。证实了该方法的合理性与正确性。
6 结论
能耗制动方式通过调节能耗电阻来改变制动时间,若想输出大的制动转矩,则需要大功率的电阻。反接制动输出的制动转矩大,但是不易控制,若电机拖动位能性负载,则有可能出现反转,这时倒不如使用能耗制动更加方便。回馈制动既能回收能量又能快速制动是使用最多的制动方法。
[1]李发海,王岩.电机及拖动基础[M].北京:清华大学出版社,1994.
[2]刘军,李金飞,俞金寿.无刷直流伺服电机四象限运行分析[J].上海交通大学学报,2009,43(12):1911.
[3]王强,王明渝,范杰.电动叉车用无刷直流电机混合制动的研究[J].电力电子技术,2007(8):70-73.
[4]胡庆波,郑继文,吕征宇.混合动力中无刷直流电机反接制动PWM调制方式的研究[J].中国电机工程学报,2007,27(30):87-90.
[5]黄奖梨,王耀明,李发海.电动汽车永磁无刷直流电机驱动系统低速能量回馈制动的研究[J].电工技术学报,1995(3):28-31.
〔责任编辑 石白云〕
A Study on Electrical Braking of Brushless DC Motor for Electric Vehicles
XING Li-cheng,HAN Feng-yang,Zhao Min
(Department of Electrical Engineering,North University of China,Taiyuan Shanxi,030051)
For study on 4-quadrant operation of Brushless DC Motor,an analysis of the three electrical braking method of BLDCM is given.A mixed braking method is needed which is composed of regenerative braking and opposed connection braking.Computer simulation and experimental results show that opposed connection braking can make up the disadvantage in low speed of regenerative braking.
brushless DCmotot;regenerative braking;opposes connection braking
R743.3
A
1674-0874(2012)02-0067-02
2011-12-08
邢立成(1985-),男,山西朔州人,硕士,研究方向:检测技术与自动化装置。
