基于颜色与结构特征的车牌定位算法
2012-09-12高一文
高一文,龚 劬
(1.重庆大学数学与统计学院,重庆 沙坪坝 400030;2.重庆文理学院教务处,重庆 永川 402160)
经过广大研究者多年的努力,已经提出了很多车牌定位的方法.主要有依据车牌灰度特性、投影特性、几何特性以及颜色特性等进行定位的方法和利用遗传算法、神经网络算法进行定位的方法.这些算法处理的车牌图像数据量大,耗时长,降低了整个车牌定位的效率,在实际运用中遇到了很大的困难;基于边缘检测的车牌定位算法虽然不依赖车牌的外边框是否清晰,实现起来效率比较高,主要是对车牌灰度变化剧烈的区域进行提取,但是对于一些多余的边缘也很敏感,这在一定程度上限制了这种方法的使用;扫描统计车牌定位方法对边缘检测后的二值化图像进行边缘点的累加,构成分割曲线定位车牌,但是这种方法适用于高阶干扰较少的车牌,对于复杂的车牌很难定位.
车牌是机动车的重要标志,各国都制定了一系列标准来规范车牌.在我国,有关法规对车牌的颜色和形状都有规定.大型汽车牌照为黄底黑字,小型车牌照为蓝底白字,公安专用汽车牌照为白底红“警”字后面黑字,大使、领事馆汽车牌照为黑底白字及红色“使”、“领”字标志,外藉汽车牌照为黑底白字,临时行驶车牌照为白底蓝色暗纹黑字.由此可见,我国的车牌具有稳定的颜色特征和形状特征,这对于车牌识别系统来说都是可以利用的稳定的先验特征.本文就是利用颜色和结构特征来对车牌进行定位.
1 车牌灰度化算法
在RGB模型中,如果R=G=B时,则彩色表示一种灰度颜色,其中R=G=B的值叫灰度值.因此,灰度图像每个像素只需一个字节存放灰度值(又称强度值、亮度值),灰度范围为0~255.彩色图像转化为灰度图像,关键是根据R、G、B分量来计算灰度值.不同的计算方法,其结果也有所不同,一般有4种方法对彩色图像进行灰度化.
1.1 分量法
将彩色图像中的3分量的亮度作为3个灰度图像的灰度值,可根据应用需要,选取一种灰度图像.
其中fk(i,j)(k=1,2,3)为转换后的灰度图像在(i,j)处的灰度值.
1.2 最大值法
将彩色图像中的3分量亮度的最大值作为灰度图像的灰度值.
f(i,j)=max(R(i,j),G(i,j),B(i,j)).
1.3 平均值法
将彩色图像中的3分量亮度求平均得到一个灰度图像.

1.4 加权平均法
根据重要性及其它指标,将3个分量以不同的权值进行加权平均.由于人眼对绿色的敏感最高,对蓝色敏感最低,因此按下式对RGB 3分量进行加权平均能得到较合理的灰度图像.
f(i,j)=0.11R(i,j)+0.59G(i,j)+0.3B(i,j).
本文采用R、G、B分量的加权平均值,结果如图1所示.

图1 彩色图像灰度化
2 车牌阈值化处理
图像阈值化分割是一种最常用同时也是最简单的图像分割方法,它特别适用于目标和背景占据不同灰度级范围的图像.它不仅可以极大地压缩数据量,而且也大大简化了分析和处理步骤,因此在很多情况下,是进行图像分析、特征提取与模式识别之前的必要的图像预处理过程.图像阈值化的目的是要按照灰度级,对像素集合进行一个划分,得到的每个子集形成一个与现实景物相对应的区域,各个区域内部具有一致的属性,而相邻区域布局有这种一致属性.这样的划分可以通过从灰度级出发选取一个或多个阈值来实现.如图2所示,利用多阈值法对车牌图像进行处理,可见用多阈值法对车牌的处理效果不好[2].所以,本文运用自动阈值分割算法最终获得理想的阈值化效果.

图2 多阈值分割
2.1 OTSU自动阈值分割算法(大津法自动阈值分割技术)
OTSU方法于1980年由日本大津展之提出,它是在最小二乘法原理基础上推导出来的,其基本思路是将直方图在某一阈值处理分割成两组,当被分成的两组的方差为最大时决定阈值.①选取的最佳阈值应当使得用该阈值分割得到的两类间具有最好的分离性;②类间分离性能最好的判据是统计意义上的类间特征差最大或类间特性差最小.
设X是一幅具有L灰度级的图像,其中第i级像素为Ni个,图像总的像素点个数为N=∑Ni,第i级像素出现的概率为.选定一个阈值K将所有的像素分为C0和C1(目标和背景)两类.其中C0类的像素灰度级为0~K,C1类的像素灰度级为(K+1)~L-1.
图像的总平均灰度级为μ=∑iPi,C0类的平均灰度级为类的像素平均灰度级为μ(1)=μ-μ(k).两部分图像所占的面积的比例分别为ω0=∑Pi与ω1=1-ω0.
令 μ0= μ(k)ω0,μ1= μ(1)ω1,则类间方差定义为
σ2= ω0(μ0- μ)2+ ω1(μ1- μ)2.
如图3所示,OTSU自动阈值化技术可以有效地表征并区分出感兴趣的部分和背景.因此,本文选用OTSU自动阈值化方法可以获得更加理想的阈值化效果.

图3 OTSU自动阈值分割
2.2 阈值化后的滤波
将图像采用OTSU方法阈值化后,可以有效表征并区分出感兴趣的部分,而对于存在的一些无关的随机噪点,这就需要对阈值化后的二值图像进行滤波.常见的滤波方法可以分为:空域滤波方法(如中值滤波、均值滤波、形态学滤波等)和频域滤波方法(如FFT滤波、DCT滤波、DWT滤波等).
在本文所研究的车牌二值化图像中,由于噪点具有随机性和不确定性,频域特征不足够明显,因此采用基于空域的滤波方法.
图4、图5和图6分别为采用中值滤波、均值滤波、形态学滤波的试验图像.由此可见,采用形态学滤波可以有效地去除无关信息,从而使车牌区域的特征更加明显.因此,本文采用形态学滤波方法.

图4 中值滤波

图5 均值滤波
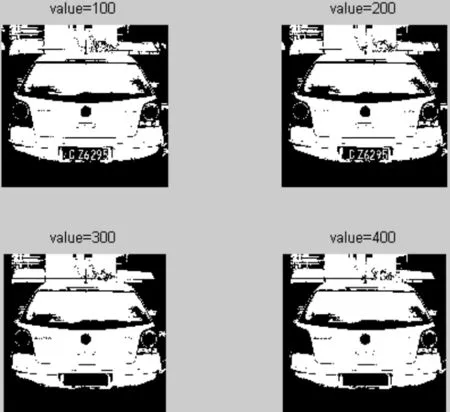
图6 形态学滤波
采用形态学滤波其参数σ的选择是十分重要的,这里的参数σ表示在车牌二值图像中,连同区域小于σ的去除.参数的选择经过图6所示的对比实验可以看出,采用σ=300较为合适,因此本文应用形态学滤波选择的滤波参数σ=300.图7为采用σ=300的形态学滤波后的车牌二值化图像.

图7 用σ=300的形态学滤波后的车牌二值图像
2.3 基于结构特征的车牌粗定位
图7为采用OTSU阈值化并用形态学滤波后的车牌二值化图像.为了有效利用车牌的矩形结构特征,本文将此车牌二值化图像反色,然后统计每一连通区域的形状特征[4],如图8所示.

图8 车牌二值化图像反色后的连通区域
设width(i)为第i个连通区域的列数,height(i)为第i个连通区域的列数,则第i个连通区域的形状特征识别参数ρ(i)为:

若第k个连通区域的形状特征识别参数ρ(k)符合预先存储的我国车牌的矩形形状特征,则第k个连通区域为可能存在的车牌区域,如图9所示为候选的车牌区域.

图9 采用形状特征选择出的候选车牌区域
2.4 基于颜色特征的车牌二级定位
利用车牌自身的结构特征粗定位出了可能存在的车牌区域为候选的车牌区域.由于在一个汽车车牌图像中一些无关随机因素的干扰,可能存在一些类似的矩形区域,将有利于对由上一步中确定出来的候选的车牌区域进行基于颜色特征的细定位,从而从多个候选的车牌区域中选取真正的车牌.在本节的车牌定位二级细划分的步骤中,就是对于候选的车牌区域进行基于颜色特征的细定位.对于候选区域,在原始采集到的彩色图像的相应区域中,进行颜色的匹配,若匹配的颜色特征恰为我国车牌规定的颜色,则判定为车牌.图10(a)为车牌定位二级细划分的示意图,图10(b)为利用颜色特征定位出的车牌.

图10 车牌定位二级细划分
3 基于颜色与结构特征的车牌定位算法
通过上述的有关论述和对比实验,本文最终确定出了基于颜色与结构特征的车牌定位算法,算法流程示意图如图11所示.
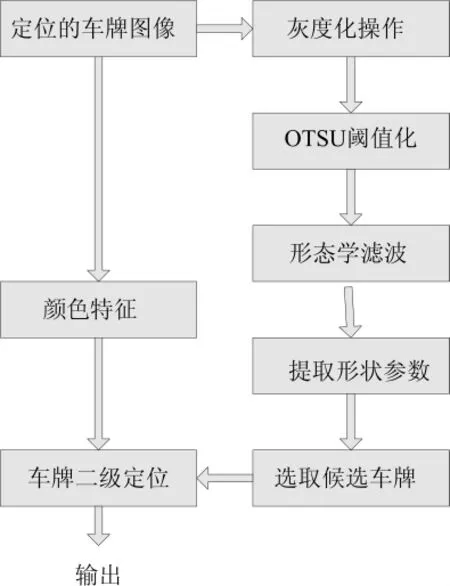
图11 基于颜色与结构特征的车牌定位算法流程示意图
对在不同背景、不同光照条件下拍摄的100幅含有各种颜色车牌的图像应用本算法,有效定位率高达到94.7%,而现有的车牌定位算法有效定位率一般在90%左右.本实验在Windows XP,内存为2G的平台及VC++6.0的编程环境下进行.
4 结语
本文在总结现有车牌定位方法的基础上,通过实验说明了目前常见的车牌定位方法存在的缺陷,进而提出了基于颜色与结构特征的车牌定位算法.这种车牌定位的方法避免了运用Gabor滤波器参数设置复杂的问题,也避免了运用人工神经网络数据处理庞大的缺点,并且对于图像中存在大量噪声、质量较差的图片也能够很好地定位,能够达到很好的定位效果.
[1]赵春雪,戚飞虎.基于彩色分割的车牌自动识别技术[J].上海交通大学学报,1998,32(10):4 -9.
[2]马胜前,张光南,杨金龙,等.基于二维直方图的otsu图像分割算法改进[J].西北师范大学学报:自然科学版,2009,45(1):57 -61.
[3]吴冰,秦志远.自动确定图像二值化最佳阈值的新方法[J].测绘学院学报,2001,18(4):283-286.
[4]李文举,梁德群,张旗,等.基于边缘颜色对的车牌定位新方法[J].计算机学报,2004,27(2):204-208.
