基于ADAMS的搅拌摩擦点焊机器人动力学仿真分析
2012-09-06张松乔凤斌刘玉来张华德
张松,乔凤斌,刘玉来,张华德
(上海航天设备制造总厂,上海200245)
基于ADAMS的搅拌摩擦点焊机器人动力学仿真分析
张松,乔凤斌,刘玉来,张华德
(上海航天设备制造总厂,上海200245)
ADAMS软件在分析机构的运动学和动力学方面有着强大的功能;针对搅拌摩擦点焊机器人的设计问题,首先建立其动力学模型,然后利用Pro/E软件建立了机器人的三维实体模型,将其导入到ADAMS中进行动力学分析,给各个关节运动副加上相应的轨迹曲线方程,使其按照指定的运动方式运动。通过仿真得到并分析了机器人各关节在运动过程中各阶段的动力学特性,为电机系统的精确选型及控制系统的设计等进一步研发搅拌摩擦点焊机器人设备提供了可靠有力的依据,对于保证其机械系统的性能以及提高其可靠性等具有十分重要的意义。
搅拌摩擦点焊;动力学模型;ADAMS;仿真分析
0 前言
搅拌摩擦点焊FSSW(Friction Stir Spot Welding)是在搅拌摩擦焊基础上研究开发的一种创新的固相焊接技术,众多优点使得搅拌摩擦点焊方法成为目前最合适用于轻金属合金薄板装配单点连接的固相连接技术[1]。搅拌摩擦点焊机器人设备的研制,可以替代传统的电阻点焊接、冲压铆接等,实现典型铝合金关键构件的优质、高效、绿色点焊连接。
借助于ADAMS虚拟样机技术研发搅拌摩擦点焊机器人设备,对于保证其机械系统的性能以及提高其可靠性具有十分重要的意义。该设备的研制对提高我国重大基础制造装备的技术水平和研发能力具有重要作用和现实意义[2]。
1 搅拌摩擦点焊机器人的动力学模型
目前,机器人动力学的研究方法很多,如拉格朗日方法、牛顿-欧拉方法、高斯方法、凯恩方法、罗伯逊-魏登堡法、旋量方法等。其中以牛顿-欧拉法和拉格朗日法运用较多。从计算量方面考虑,使用牛顿-欧拉方法,在原有算法的基础上,将所有杆件的速度、加速度、惯性矩阵、质心位置、力和力矩等都表示在各杆的坐标系中,从而使计算更加简单,使计算关节驱动力矩的时间不仅与机器人关节数成线性比例,而且与点焊机器人的构型无关[3]。
首先从连杆1到连杆n向外递推计算各连杆的速度和加速度,计算出每个连杆的惯性力和力矩。第二步,从连杆n到连杆1向内递推计算各连杆内部相互作用力和力矩、关节驱动力和力矩[4],见图1。

图1 连杆受力分析Fig.1 Connecting rod stress analysis
(1)向外递推(i:0→n-1)。
连杆i+1的角速度

连杆i+1的角加速度

连杆i+1的线速度

连杆i+1的线加速度

作用于连杆i+1质心上的力

作用于连杆i+1质心上的力矩

(2)向内递推(i:n→1)。
作用于连杆i质心上的力

作用于连杆i质心上的力矩

关节驱动力矩
机器人动力学模型的建立,可以在已知各关节位移、速度和加速度的情况下,求得各关节所需要的驱动力和力矩,为机器人的动力学仿真提供依据[5]。
2 搅拌摩擦点焊机器人虚拟样机模型的建立
虚拟样机仿真技术在机械工程中的应用就是机械系统的动态仿真技术。该技术的使用,让用户能够用虚拟样机代替大多数的物理样机进行模拟试验。虚拟样机技术软件ADAMS具有非常强的动力学仿真功能,可以把在Pro/E中建立的三维模型通过接口转换成能够进行动力学分析的模型,并且通过确定各关节角的运动轨迹进行动力学仿真。根据设计参数利用Pro/E软件设计出机器人零件,然后进行装配,从而形成了机器人的本体结构模型,如图2所示。在进行零件设计的时候就要完成对零件材料的定义。完成了零件的设计后,在进行装配工作时要注意把没有相对运动的零件装配成一个组件,这样可以为后续的定义刚体做好准备。定义刚体是在ADAMS中进行的,ADAMS和Pro/E有一个共同的接口Mechanical/Pro可以实现两者间的无缝连接,可以方便地完成模型的转换[6]。

图2 搅拌摩擦点焊机器人模型Fig.2 FSSW robot model
3 搅拌摩擦点焊机器人动力学仿真分析
虚拟样机仿真模型建立好后,在ADAMS/View中调用ADAMS/Solve模块,即可进行动态仿真。在仿真过程中,要使机器人按照一定的规律运动,需要给各个关节运动副加上相应的轨迹曲线方程,关节才能按照指定的运动方式运动[7]。可重复设定输入值和精度,重复地对系统进行仿真,直到获得所需要的结果,对结果进行分析,了解这种结果产生的原因,并且能够得到数据的输出,为搅拌摩擦点焊机器人的结构设计以及控制系统提供条件。
根据实际需要的工作轨迹,通过多次虚拟试验,综合考虑技术指标中各关节的速度和加速度要求得到各关节的角位移函数,角位移曲线如图3所示。

图3 各关节输入的角位移曲线Fig.3 Input angular displacement curves of each joint
将图3所示的角位移曲线转变为样条函数(Spline),作为ADAMS的输入,即各关节的驱动函数,仿真得到点焊机器人实际工作轨迹中各关节的角速度、角加速度和力矩变化曲线,其曲线分别如图4、图5和图6所示。
由图5和图6可知,点焊机器人在整个运动过程中各关节速度、加速度变化较平缓,没有突变,且都符合技术指标中对速度和加速度的要求。

图4 点焊机器人各关节的角速度曲线Fig.4 Angular speed curve of FSSW robot's Each joint

图5 点焊机器人各关节的角加速度曲线Fig.5 Angle acceleration curve of FSSW robot's each joint
(1)关节1的角速度和角加速度在7.5~9.5 s之间较大,其他时间段普遍较小,这是因为该时间段内要转移到另外一点进行焊接,主要依靠关节1的旋转动作,并且要求动作迅速、平稳,因此关节1的角速度和角加速度都应较大,仿真结果与实际分析相符。
(2)关节2的角加速度在0~1.5s、3.5~4.0s和5.5~7.5s之间较大,在其他时间段内较小。因为在0~1.5s内,点焊机器人空载运行,机械臂应迅速到达要求焊接的工件上方,所以要有较大的角加速度和角速度;而在3.5~4.0 s和5.5~7.5 s内关节2完成焊接,在焊接的瞬间及整个焊接过程中,加速度也较大,在3.5~4.0 s内虽然加速度较大,但由于时间非常短,所以角速度并不大,仿真结果与实际分析相符。关节3和关节5配合关节2完成相应动作,动作过程相似,其仿真结果也相似。
(3)关节4和关节6的动作较少,都是为了完成特定动作;关节4的动作主要是协助完成转移到指定位置时的位姿调整;关节6的动作主要是旋转,避免在焊接复杂工件时发生碰撞。因此都是在特定的动作时间段内有较大的角速度和角加速度,仿真结果与实际分析相符[8]。
对点焊机器人各关节的力矩进行统计可知,点焊机器人在实际工作中,最开始由于点焊机器人空载运行,所以各关节驱动力矩相对都比较小,其中关节2的力矩值较大,这是因为该阶段关节2的动作幅度最大,加速度值比较大。在进行焊接时各关节的力矩普遍都很大,最大力矩出现在关节2上,因为此时机器人手臂伸展长度最大,关节2处的重力矩达到最大值,并且在提取的瞬间加速度值也较大。在转移到另外焊接点时,除了有加速动作的关节1和关节4外,其他各关节的力矩都处于稳定输出状态。
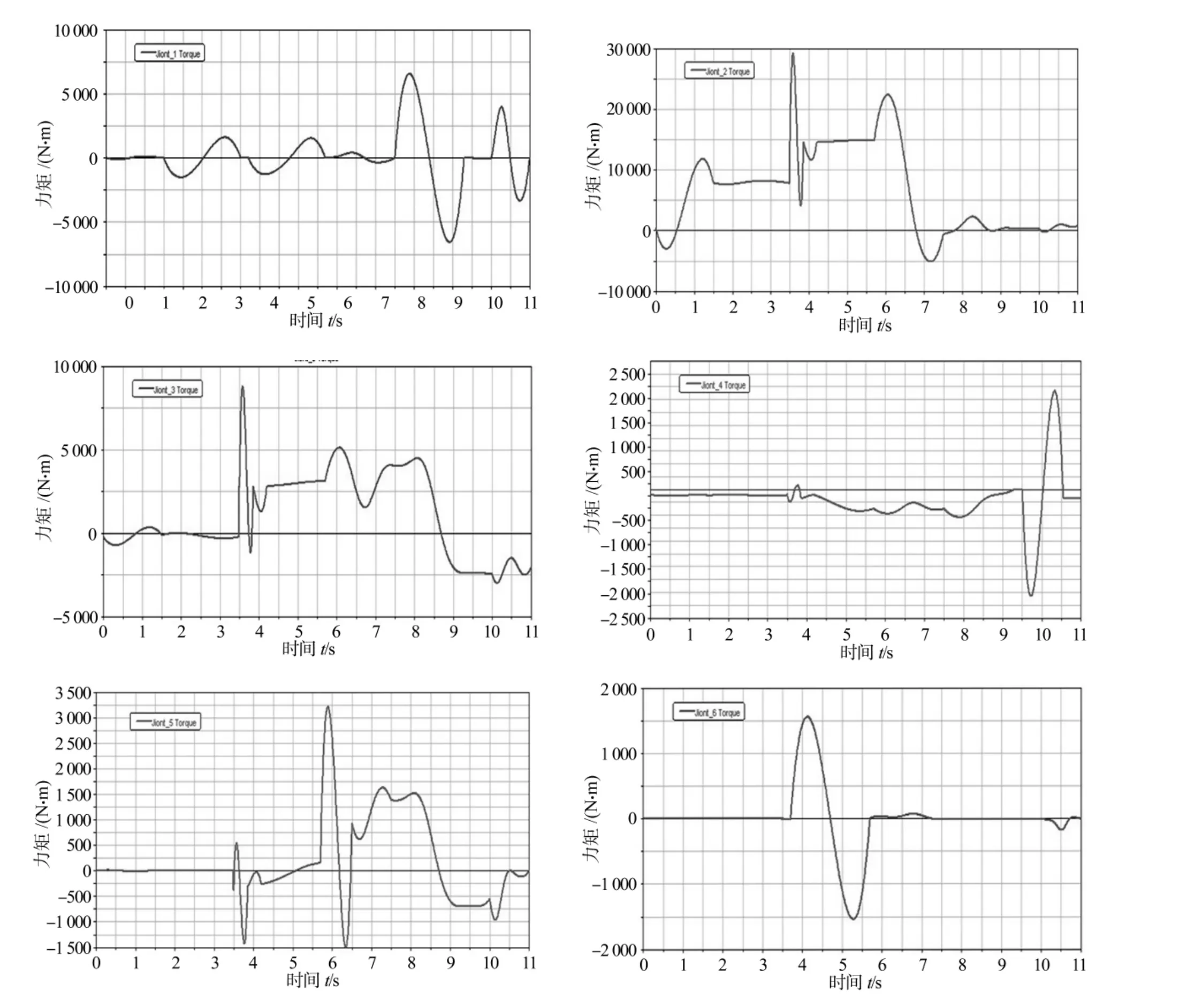
图6 点焊机器人各关节的力矩曲线Fig.6 Torque curves of FSSW robot's each joint
4 结论
借助虚拟样机技术,建立了搅拌摩擦点焊机器人的三维实体模型后,应用ADAMS软件进行动力学仿真分析,通过仿真得到并分析了运动过程中机器人各关节的动力学特性,为进一步研发搅拌摩擦点焊机器人设备提供了可靠有力的依据,对于保证其机械系统的性能以及提高可靠性具有十分重要的意义。
[1]秦红珊,杨新歧.搅拌摩擦点焊技术及在汽车工业应用前景[J].汽车技术,2006(1):1-4.
[2]Fujimoto M,Inuzuka M,Koga S.Development of friction spot joining[J].Welding in the World,2005(3,4):18-21.
[3]Takeshi K,Toshiaki M.Application of friction stir welding to construction of railway vehicles[J].Series A,2004(3):23-28.
[4]陈美宏,焦恩璋.空间焊缝的位姿参数与放置规划研究[J].电焊机,2011,41(4):24-28.
[5]谭一炯,周方明,王江超,等.焊接机器人技术现状与发展趋势[J].电焊机,2011,41(3):6-10.
[6]王立权,王小东.基于虚拟样机的控制系统仿真研究[J].机器人,1994(16):129-132.
[7]张国栋,李志远.低合金高强钢焊缝针状铁素体转变动力学及其仿真[J].电焊机,2002,32(6):9-12.
[8]沈红芳,宋又廉.基于ADAMS的弧焊机器人动力学仿真[J].机械设计与研究,2005,21(6):50-52.
The analysis of kinematic simulation of friction stir spot welding robot based on ADAMS
ZHANG Song,QIAO Feng-bin,LIU Yu-lai,ZHANG Hua-de
(Shanghai Spaceflight Manufacture(Group)Co.,Ltd,Shanghai 200245,China)
The software ADAMS has powerful function on the analysis of the institutions of the kinematics and dynamics.According to friction stir welding robot dynamic problems in design process,established its dynamics model,and using Pro/E software built its 3D entity model into ADAMS for dynamic analysis.Give the track of the corresponding vice curve equation to each joint movement,and make it movement according to specified movement way.Get and analysis the dynamic properties of each joint of the robot by the simulation and of the movement process,which provides a reliable powerful basis for further research and development of the friction stir welding robot equipment such as the accurately and selection of the motor system and the design of the control system.Have a very vital significance to ensure the performance of mechanical system and its reliability.
FSSW;dynamics model;ADAMS;simulation analysis
book=6,ebook=54
TG409
A
1001-2303(2012)06-0113-05
2011-11-28
上海市科委资助项目(10DE2250300)
张松(1985—),男,河南信阳人,工程师,硕士,主要从事机械结构设计与仿真分析等方面的工作。
