高精度线路测量车测量系统及其应用
2012-09-05吴海涛
吴海涛
(上海大型养路机械运用检修段,上海 200439)
目前,既有的有砟线路维修整修工作均由大型养路机械完成。由于传统的捣固车采用20m钢弦指导线路维修作业,对于线路长波不平顺的整治效果不很明显。采用激光准直技术原理的全线路激光测量系统,对提高作业质量以及线路的长波平顺性具有非常重要的现实意义。
由奥地利普拉塞—陶依尔公司生产的 EMSAT120高精度测量车是目前世界上测量精度最高、综合性能最好的测量车。该车可选择固定点对轨道抄平拨道值进行高精度电子测量,同时该车还可以对线路拨道值、抄平值(水平值)、轨距、完成里程等数据进行测量和运算。该车的测量结果可以直接输入装有ALC(自动电平控制)的捣固车,并能满足其作业需要。高精度线路测量车可以在雨天和夜间作业,并能在风沙和灰尘严重的条件下正常工作,连续作业时间超过10 h以上。目前,已由昆明中铁大型养路机械集团有限公司着手进行高精度线路测量车的技术引进工作。
全路首台高精度线路测量车去年中旬已在上海客专维修基地投入使用,并落户上海客专维修基地。
1 测量系统
EM-SAT120高精度测量车,如图1所示,用于测量和计算铁路线路相对于固定点的起道量、拨道量、以及轨距、超高、里程等数据,这些数据能够满足线路新建、大修和维修时捣固作业需要。同时,这些数据能够直接输入配备有ALC的捣固车(09-3X Dynamic或D09-32),作为捣固车的部分控制参数完成捣固车起道和拨道作业。由于线路起道量、拨道量测量的参考点是固定点——认为大地坐标系不变的点,所以其测量值是参考大地坐标系的绝对值。捣固车按照这些值进行起拨道、捣固作业后,线路不仅能够达到平顺并保持几何形状,同时还能保证相对于固定点的位置精度,使线路恢复到设计状态。

图1 EM-SAT120高精度线路测量车
1.1 卫星小车
卫星小车也称为前导测量小车,如图2所示,它由1个小型司机室、4个小车轮、以及电驱动走行系统组成。在司机室内布置有蓄电池、走行操控装置、激光发射装置、激光对准装置以及可供一个人使用的小座椅等。其中激光发射装置为核心部件。
非作业时,卫星小车置于主车架前端上部,随主车运行,并由主车电源向蓄电池冲电。作业时,由收放装置放下置于钢轨上,操作人员进入司机室,操作相关装置进行蓄电池供电走行。总体来说,卫星小车提供了一个搬运、操作激光发射装置的相对良好的工作环境。

图2 卫星小车
每个测量段测量步骤基本是:停止发射小车,主车向发射车开进的过程中,由主车实时测量线路的相关参数值,其测量速度约为5~7 km/h。主车与发射车间距离由主车上的非接触距离测量单元测得。
1.2 测量小车
测量小车安装于主车架前部下方,如图3所示,由两大两小共4个车轮实现在轨上行走,通过左右两铰接杆与车架相连接。高速走行时,由提升气缸提起并锁定悬挂于主车架上;作业时,解锁并下放于钢轨上,并由提升气缸施加一定下压力。此外,按作业需要,由左右加载气缸施加加载力,使其紧贴于一侧钢轨。
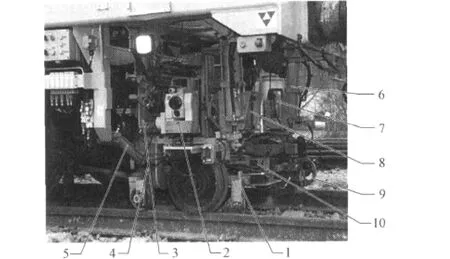
图3 测量小车
在测量小车上安装有各种线路测量传感器,如里程测量轮、可左右上下两维移动的激光接收器、轨距测量传感器、超高测量传感器(电子摆)、对准固定点的视频相机、测量固定点的测量机器人等。
1.3 测量原理
EM-SAT120是作业前导测量车,其数据后续处理完成。在其绝对坐标测量原理上,由GPS系统获取主车起始点位置的绝对坐标,然后将激光弦线测得的相对偏差数据转换成相应的绝对位置及其偏差。EMSAT120测量车的核心功能是将已知的线路几何理论数据与本车实测数据按公里标位置进行逐点比较,计算出差值,作为捣固车前端拨道偏移量和前端起道修正量,控制捣固车作业。由于线路几何理论数据是以绝对坐标系内的固定点(布置在接触网杆、挡墙上)为参考,因此所测得的修正量是绝对坐标系内的修正量。捣固车按此修正量作业后,会使线路恢复到线路几何理论形状和位置。要实现绝对坐标系内测量,EMSAT120测量车必须结合固定点才能完成测量工作。所谓固定点,是布设在相对稳固基础上的(如触网杆、挡墙等)、人为认为较长时间内坐标不会变化的点,这些点用来做EM-SAT120测量车的测量基准。
EM-SAT120测量车的工作原理如图4所示。测量工作开始前,线路的理论几何曲线要素和固定点处钢轨上相应点到固定点的理论水平距离和高程距离必须已知(这些数据由中央数据库管理),并已输入主车计算机系统,这是EM-SAT120测量车工作的前提条件。测量工作时,将主车和卫星小车分别开行到两相邻固定点处,对准固定点,测出主车和卫星小车相对于固定点的实际距离,即以固定点为基准定位;在卫星前导小车激光发射器和测量主车激光接收器之间建立一束激光(激光弦);测量主车按测量速度向前开行,里程测量传感器测出主车位置,激光接收器跟踪激光弦并测出拨道方向和起道高低的位置,实时输入测量计算机系统,与计算机内已经存在的理论数据进行比较,最终得到线路各点实际线路与理论线路的偏差数据。当主车测量走行到卫星小车所在位置时停止,完成本段两固定点间测量,卫星小车向下一固定点开行、对位,如此周而复始地进行大区段作业。由于整个测量工作是以固定点为基准,所以测得的偏差数据是线路相对于绝对坐标系的偏差。这些数据可供后序作业使用,如判定线路是否需要维修、计算线路最大允许通过速度等,最普遍的用途是输入捣固车操作系统,引导捣固车作业。捣固车按此数据作业后,会使线路恢复到绝对坐标系下的形状和位置。
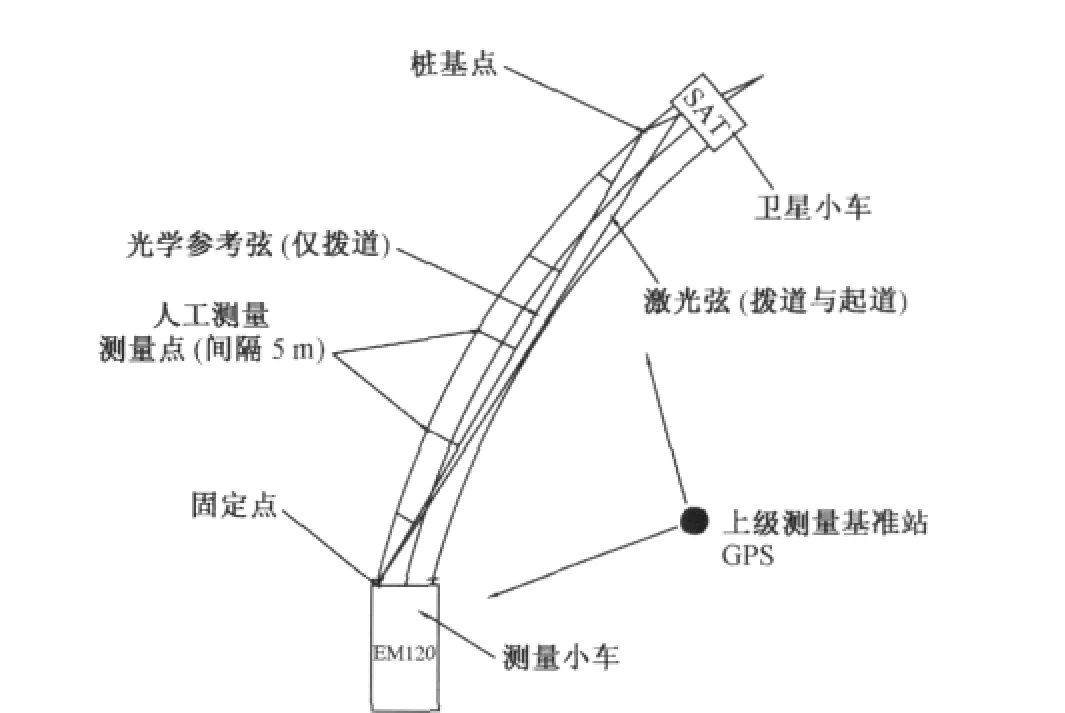
图4 测量原理示意
2 主要技术参数
EM-SAT120高精度线路测量车的主要技术参数如下。
2.1 运行与作业条件
符合中国铁路机车车辆限界设计要求和铁路线路使用要求。
2.2 作业性能
1)能在直线段、曲线段及道岔区进行作业。
2)一次作业,同时完成方向(正矢)、高低(纵平)、超高(横平、水平)、轨距、里程位置的测量;作业速度不小于2.5 km/h。
3)测量作业范围:方向最大测量范围1 000mm;高低最大测量范围400mm;超高最大测量范围180mm;测量作业时运行速度2.5~7.0 km/h。
4)作业时激光束最少有效距离250m。
5)作业精度:轨道方向和高低测量精度±1 mm;横向水平(超高)±1 mm;轨距测量精度±1 mm;距离误差0.1 m/100m。
2.3 整机主要性能与参数
外形尺寸(长×宽×高)为16 052 mm×3 020mm×3 970mm;整机质量50 t;发动机额定功率370 kW;双向最高自行速度120 km/h;作业速度为5~7 km/h。
3 施工作业及使用
在EM-SAT120高精度线路测量车到达上海客专维修基地后,基地各部门首先进行了试车工作,在作业性能试验满足要求后投入现场使用,取得了较好的效果。
3.1 作业性能试验
1)大机编组:沪端GC01+DG+WD京端
EM-SAT120高精度线路测量车1台+带ALC功能的捣固车1台+稳定车1台。
2)试验工作内容
第一阶段在黄渡基地开展,由机组人员完成黄渡基地1道500m距离的固定点的建立及测量工作,将数据输入GC01计算机。
第二阶段在黄渡基地开展,由外方技术专家和机组人员完成测量车的故障处理,恢复作业状态,并对测量数据进行评估和优化,期间同时对测量车的机械性能进行测试。
第三阶段在京沪线K820—K840区试验段开展,完成试验线路固定点系统的安装,使用捣固车进行配合。完成测量并将固定点数据输入EM-SAT120,确认固定点精确度和优化,同时结合线路几何参数,产生外部转换和抄平数据,处理数据并将其导入捣固车的ALC系统。通过捣固车的仪表观察测量数值的真伪,确认需要起拨道数值的正确性。测量固定点和优化测量的数据,并将数据提供给捣固车进行起拨道捣固作业。
在整个试验区段进行测试作业,全面考核EMSAT120高精度测量车的作业参数和作业效率,测量项目包括:参考长距离激光弦的线路正矢值;参考长距离激光弦的线路相对横向水平、纵向水平、完成的里程和轨距。
3)试验结论
经过3个阶段的性能试验,EM-SAT120高精度线路测量车各项性能指标符合出厂标准,满足线路测量要求,具备轨道使用条件。
3.2 现场应用情况
EM-SAT120高精度线路测量车在建立了固定桩系统的线路上经过半年多的使用表明,其测量数据准确,能够真实反映线路真实状况,指导捣固车进行作业,使线路恢复到初始设计标准,可消除长波不平顺。同时,使用中也存在固定桩系统不统一、数据格式不匹配、信息数据库标准不相同等问题。这就需要技术研发部门和使用单位进行协作解决,以利于今后推广使用。
4 结束语
1)经过现场使用表明,EM-SAT120高精度测量车能够测量和计算铁路线路相对于固定点的起道量、拨道量、轨距、超高、里程等数据,这些数据能够满足线路新建、大修和维修时捣固作业需要。同时,这些数据能够直接输入配备有ALC的捣固车,指导捣固车进行作业,使线路恢复到初始设计标准,消除长波不平顺。
2)既有线固定桩系统的不统一、数据格式不匹配、信息数据库标准不相同等问题对将来高精度测量车的大规模应用有较大影响,需要解决。
3)工务部门应该深入研究施工组织,进一步提高使用效率。
[1]高春雷,王发灯.利用激光准直技术检测线路的长波不平顺[J].铁道建筑,2009(1):81-83.
[2]韩志青,唐定全.抄平起拨道捣固车[M].北京:中国铁道出版社,2006.
