Cosmosmotion平台下并联涂胶机构仿真分析
2012-09-03王淑旺鲁恒飞顾立才
王淑旺, 鲁恒飞, 顾立才
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
0 引 言
目前随着全球机械和自动化设备的市场竞争加剧,缩短产品研发周期已成为竞争的重要手段之一,同时也是制造商们把握先机求得优势的重要保障。虚拟产品开发技术用计算机模拟整个产品的开发过程,在计算机中进行产品设计、分析、加工等过程,这样不仅省去了制造样机进行反复实验、修改等环节,同时也大大缩短了产品的开发周期,降低了产品成本,而且为今后新产品的开发创新建立了基础模型。
本文针对安徽巨一自动化装备有限公司与天津大学合作开发的863项目中的并联涂胶机构,运用Solidworks以及集成于其中的仿真插件Cosmosmotion实现虚拟样机设计及运动仿真,对设计进行验证和优化[1-3]。
1 机构设计与分析需求
本文所研究的并联涂胶机械手机构,是基于天津大学研发的并联式五坐标机器人而开发的。并联式五坐标机器人是一个由静平台、中杆、推杆和动平台等组成的复合式五坐标装置,可实现终端的上下移动、摆动以及旋转运动。并联涂胶机械手机构还包括夹爪,它是执行的终端,它的3个定位夹紧的动臂由气缸带动,可沿孔腔移动和绕轴线转动,以实现夹取工件的目的。
整个机构的动作过程是通过一个由转轴和轴承联接、在机器人执行末端的机械手组件来实现定位、抓取并夹紧工件,经过一系列运动的合成来实现工件的翻转和涂胶,涂胶完成后再将工件准确放回到线体托盘上。
五坐标并联机器人、工件(变速箱壳体)和夹爪的模型如图1、图2所示。

图1 五坐标机器人

图2 变速箱壳体和夹爪模型
由于并联涂胶机构在实际运行过程中并不能很方便地测量一些关键部位所受到的力和力矩,往往只有使用一段时间后才能知道方案的好坏,因此,在虚拟样机上模拟涂胶机构的运动及受力是必要的。
2 仿真方案与流程
2.1 仿真方案设计
先在Solidworks上建立包含并联机械手机构、线体、工件和涂胶设备的总装配体,再利用Cosmosmotion上的各种命令来设定初始条件,运行仿真。
由于整个涂胶机构要实现一个翻转、定位、夹紧工件到翻转、涂胶和送回的复杂运动过程,在Cosmotion平台下定义相关零件作相应的平动和转动(motion里面是线性马达和扭转马达):五坐标机器人的3个推杆分别按样条线运动;执行末端与机械手联接的转头设定特定的转动;机械手上的夹爪设定伸缩和旋转来模拟夹紧和松开工件[4-5]。
2.2 仿真流程
按照设计要求建立仿真流程,如图3所示。
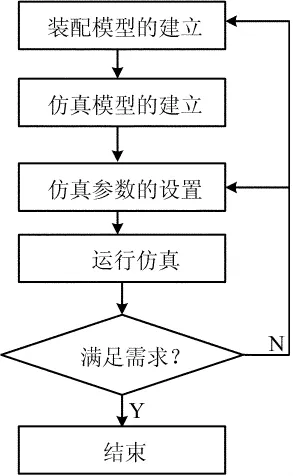
图3 仿真流程图
3 仿真分析
3.1 设定运动、静止零部件
静止零部件有静平台、实验线体和涂胶设备,其余均为运动零部件。
3.2 约束参数的给定
推杆1、2、3和中杆都由样条线给定运动,转头以及3个夹爪的伸缩和旋转均由表达式中的STEP函数约束。
3.2.1 动作设定
(1)0~2s,转头旋转180°,同时中杆带动夹具往下平动,使夹爪慢慢接近变壳。
(2)5~6s,3个夹爪头往外伸出。
(3)6~7s,夹爪旋转一定角度,以使夹爪头对准变壳的3个定位孔。
(4)7~8s,夹爪向内缩进,从而达到夹紧变壳的目的。
(5)8~12s,中杆带动夹具往上平动,同时10~12s转头回转180°,使变壳到达涂胶预定位置。
(6)13~42s,通过推杆和夹具转动副的综合运动使变壳按预定轨迹运动,实现涂胶过程。
(7)43~55s,转头转动180°,中杆往下平动,松开夹爪,将变壳放到线体上。
3.2.2 STEP函数
(1)转头。STEP(TIME,0,0D,2,-180D)+STEP(TIME,10,0D,12,180D)+STEP(TIME,43,0D,45,-180D)。
0~2s,转头旋转180°,10~12s转头回转180°,43~55s,转头转动180°。
(2)夹爪伸缩。STEP(TIME,5,0,6,30)+STEP(TIME,7,0,8,-27)+STEP(TIME,48,0,48.4,30)+STEP(TIME,51,0,52,-33)。
5~6s,3个夹爪头往外伸出,7~8s,夹爪向内缩进,从而达到夹紧变壳的目的。
(3)夹 爪 摆 动。STEP(TIME,6,0D,7,-180D)+STEP(TIME,49,0,50,180D)。
6~7s,夹爪旋转一定角度,以使夹爪头对准变壳的3个定位孔。
3.2.3 添加碰撞
分别添加3个夹爪动臂和变壳之间的3D碰撞,以及变壳和夹具主体的3D碰撞。
3.2.4 添加阻尼
分别添加3个夹爪动臂和夹具主体之间的线性阻尼。
3.3 设置运动仿真参数
设定涂胶设备仿真的持续时间为55s,帧为550,其余为默认配置。
3.4 运行仿真
将结果输出为AVI动画,虚拟样机仿真各个阶段示意图,如图4所示。

图4 并联涂胶机构仿真示意
3.5 后处理
(1)轨迹跟踪。右键单击结果选项里的跟踪路径,选择生成轨迹跟踪,弹出编辑跟踪路径对话框,然后拾取工件变速箱壳体的上表面,显示工件的运动轨迹。
(2)在结果中生成图表,生成变壳的质心位置图、速度图和加速度图、夹爪反作用力图等,如图5、图6所示。
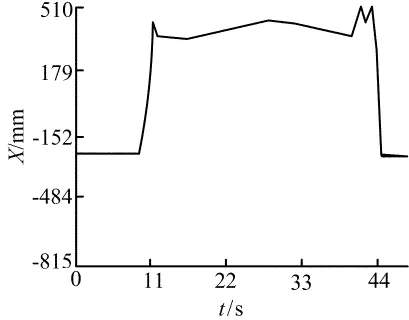
图5 变速器壳体质心位置
(3)运动参数显示。右击“结果”/“加速度”,选择“生成加速度”命令,选择夹具上的关键点,得到夹具运动到该瞬时的时候,该点的加速度矢量箭头,描述加速度的大小和方向。右击Acceleration,选择“输出CSV”命令,得到该点的各个时间的瞬时加速度的幅值和方向。

图6 夹爪反作用力
(4)结果分析。由图6可知,在夹具夹紧变壳后转头转动180°和在涂胶运动过程中,夹爪受力较大,峰值达到2 500N(因为虚拟样机中机构假定为刚体,故仿真结果要高于实际数值),因此在涂胶过程中气缸上的夹紧力必须保证不低于最大值乘上安全系数。
4 优化设计
鉴于结果中工件在被夹紧和松开的时间段附近质心位置变化较大,且反作用力峰值出现得非常陡,这与实际情形不相符,故通过对模型优化和对仿真参数进行调整,并观看仿真动作和结果表格,得出一组比较好的仿真参数[6-8]。
夹爪上转动定位销直径与变壳定位孔直径差值从2mm减小到1mm,夹紧。伸缩长度由30增加到32,STEP函数为STEP(TIME,5,0,6,32)+STEP(TIME,7,0,8,-29)+STEP(TIME,48,0,48.5,32)+STEP(TIME,51,0,52,-35)。
仿真运行完成后,工件变壳的质心位置如图7所示。
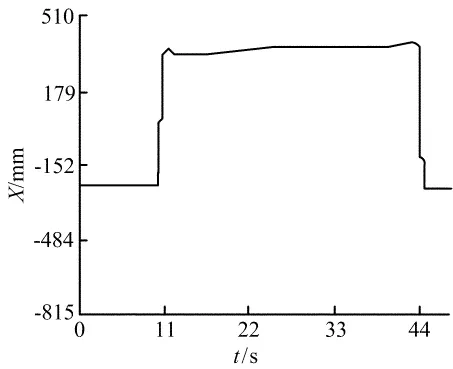
图7 优化后的变壳质心位置
可以看出,在夹紧和松开的过程中,变壳质心位置变动不大,涂胶过程中质心位置较平缓,达到了设计优化的目的。
5 结束语
Cosmosmotion仿真提供了一种切实有效的手段和方法,它可以减少实验的次数和降低成本,而且仿真节省了繁杂的编程,能从仿真的动作和结果中看出动作过程和布局结构的合理性,可以根据结果优化设施布局并更改动作过程。因此,Cosmosmotion仿真可以缩短产品设计周期,节约产品成本,也可用来进行创新设计等。
对仿真的结果进行分析可以得知,机构在运动中什么时间什么位置的加速度较大,关键零部件什么时候的反作用力较大,也可以根据机构关键点的运动轨迹的跟踪来发现机构的运动状况,并根据分析的结果来调整设计方案,从而达到优化设计的目的。
基于机构仿真运动分析的结果,以及结构分析中的载荷值和约束,再进行关键零部件的结构分析,可以得出安全系数、应力应变位移等结果,从而在保证强度可靠性的前提下,采用便宜的材料以及减少零部件材料来达到降低成本、改善性能的目的。
[1]尹成龙,牛多青.基于Solidworks的挖掘机虚拟样机设计及工作装置运动仿真[J].机械制造,2009(4):15-17.
[2]李 涛,骆敏舟,时张杰,等.欠驱动仿人机器人手爪的精确捏取与包络抓取研究[J].机械设计,2009(11):42-44.
[3]刘吉安,张志成,李克天.基于CosmosMotion的焊头四连杆机构优化设计[J].机电工程技术,2009,38(7):108-111.
[4]王 健,刘正士.基于Cosmosmotion的圆柱坐标型机械手的机构设计与仿真[J].机械制造,2009(5):13-15.
[5]张晋西,郭学琴.Solidworks及COSMOSMotion机械仿真设计[M].北京:清华大学出版社,2007:11-13.
[6]叶修梓,陈超祥.COSMOS高级教程:COSMOSMotion[M].北京:机械工业出版社,2008:68-69.
[7]李立顺,刘 辉,李红勋,等.集装箱双面吊吊臂连杆机构的设计与运动学分析[J].起重运输机械,2010(3):27-29.
[8]钱德猛,王长文.基于虚拟样机技术的某型商务车底盘悬架系统的试验开发[J].合肥工业大学学报:自然科学版,2007,30(Z1):68-72.
