直角坐标机器人设计方案的灰色模糊综合评价
2012-09-03申浩宇张海岩
沈 健, 申浩宇, 张海岩
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.合肥工业大学 化学工程学院,安徽 合肥 230009)
如何通过合理的评价方法对产品设计方案进行分析和评价,从而为设计提供可靠的依据,是产品设计中一个重要的环节。直角坐标机器人的方案评价需要考虑众多评价指标,而且评价指标之间相互影响,相互制约,这就给评价带来了很大的难度。模糊综合评价法和灰色评价法是目前常用的2种综合评价方法[1]。然而面对复杂系统决策问题,这2种评价方法均有各自的局限性,如果单独地应用其中一种进行设计方案分析,都有可能出现偏差,不能完整地反映出设计方案优选过程中灰色、模糊等不确定信息之间的相近程度[2]。另外,现有的综合评价方法中的权重确定方法一般是专家评分法、层次分析法等赋权法,无法隔离主观因素对评价结果的不利影响[3]。
针对这些问题,本文使用熵权法确定指标权重,并集成灰色评价法和模糊综合评价法构建灰色模糊评价模型,以此来对直角坐标机器人的设计方案进行评估。
1 评价指标体系的建立
一个完整的直角坐标机器人主要由直线定位单元、驱动系统、控制系统、手抓系统4个部分[4]组成,是直角坐标机器人整体性能评价的主要内容。直角坐标机器人的评价指标体系分2个层次,如图1所示。第1层指标集B={B1,B2,B3,B4,B5},第2层指标集B1={C1,C2,C3},B2={C4,C5},B3={C6,C7,C8,C9},B4={C10,C11,C12}。
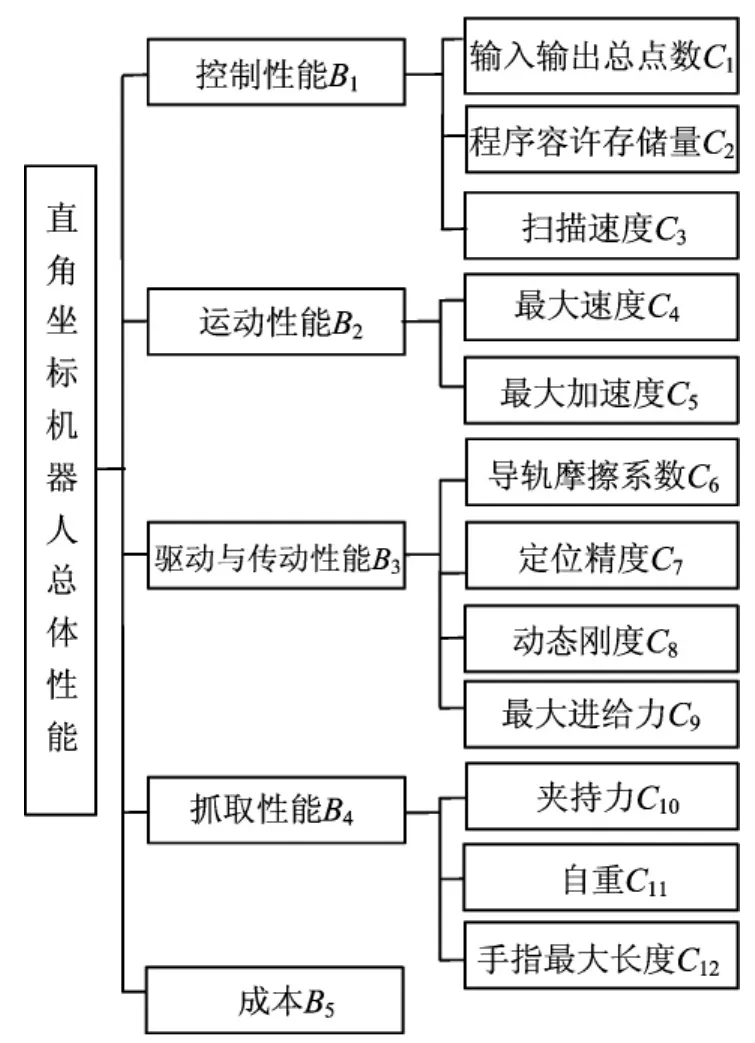
图1 直角坐标机器人总体设计方案评价指标体系
其中,B1表示控制性能指标;B2表示直角坐标机器人的速度性能指标;B3表示驱动和传动性能指标;B4表示直角坐标机器人的抓取性能指标;B5表示直角坐标机器人的成本指标。PLC是一种在各种机器人的控制系统中都很常用的控制器,本文以此为例,则B1包括C1~C3:C1为所选用PLC的最大开关量(I/O)点数;C2为PLC的程序容许存储量;C3为PLC的扫描速度。速度性能指标B2包括C4、C5:C4为直线定位单元的运动滑块的最大运动速度;C5为直线定位单元的运动滑块的最大加速度。驱动和传动性能指标B3包括C6~C9:C6为直角坐标机器人的运动轴所选用导轨的摩擦系数;C7为直线定位单元的传动系统的定位精度;C8为传动系统的动态刚度;C9为直线定位单元的驱动系统的最大进给力。抓取性能指标B4包括C10~C12:C10为直角坐标机器人选用的抓手的手指最大长度行程;C11为抓手的最大夹持力;C12为抓手自重。
2 灰色模糊评价模型的建立
基于灰色评价法和模糊综合评价法的各自优点,并结合熵权法构建综合评价模型。
2.1 建立方案集和指标集
若设计中有n个备选方案,则方案集为X={x1,x2,…,xn}。直角坐标机器人的指标集分为2个层次,在上节已建立。
2.2 进行一级综合评价
2.2.1 建立决策指标矩阵
由图1可知,若第1层指标Bk(k=1,2,3,4)包括m个第2层次指标,备选方案有n个,其决策指标矩阵[5]为:

其中,yij为第i个方案的第j(j=1,2,…,m)项技术指标的原始数据。
2.2.2 评价序列的规范化处理
(1)定量指标数据的规范化处理。对于单位不同,或初值不同的数列做关联度分析时,一般要做处理,使之无量纲化、归一化[6]。根据模糊数学隶属函数理论,将数据序列化成同一个数量级。经过处理的数据全部在[0,1]范围内,用从优隶属度[5]表示。
当第j项指标为正指标时,则

当第j项指标为负指标时,则

其中,i=1,2,…,n;j=1,2,…,m。
(2)定性指标的规范化处理。采用模糊数对方案中的定性指标进行模糊量化,常用的模糊数是梯形模糊数,记为(α,m,n,β)。为计算方便,又可以写成 L-R型模糊数(m,n;γ,δ),其中γ=m-α,δ=β-n。对定性指标评价常用的语言标度为:很好、好、比较好、一般、比较差、差、很差。可以用模糊数来连续定义这种语言标度,见表1所列。

表1 语言标度的模糊数表示
设2个L-R型梯形模糊数 M=(a,b;α,β)、N=(c,d;γ,δ),则可利用(4)式进行模糊数的近似运算,即

得到该模糊数的近似解后,求所得模糊数的整体期望值,所得数值也在[0,1]范围内,即为该定性指标的规范化结果[7]。
(3)在对评价序列完成规范化处理后,得到规范化处理后的决策指标矩阵为:

其中,xi(j)为第i个方案的第j(j=1,2,…,m)项技术指标的原始值规范化处理后的数据。
2.2.3 确定参考数据序列
参考数据一般为各个指标值在各个方案中的最优值,因此参考数据序列的从优隶属度均为1[5],即

2.2.4 计算灰色关联系数
根据灰色理论,灰色关联系数的计算公式[6]为:

(7)式中ρ称为分辨系数,一般取ρ=0.5。
将规范化处理后的决策指标矩阵Xk和参考数据序列X0(j)代入(7)式,得灰色关联系数矩阵[7]为:

2.2.5 确定指标的权重
对评价序列规范化处理的结果,采用熵权法[8-9]确定权重。
(1)计算第j项指标下第i个评价对象指标值的比重,即

(2)计算第j项指标的熵值Ej,即

(3)计算第j项指标的差异系数gj,即

(4)计算第j项指标的权重wj,即
进而得到一级权重集为:

2.2.6 一级综合评价
根据以上步骤求得一级灰色关联系数矩阵ξ和权重集Wk以后,可得一级综合评价模型:
Rk即为指标Bk对各个设计方案的综合评价值。
2.3 进行二级综合评价
在完成一级综合评价后,根据评价指标体系,可以分别得到第1层次指标B1、B2、B3、B4对各个方案的综合评价值R1、R2、R3、R4。然后对第1层次指标B5在各个方案中的原始值进行规范化处理,得到该指标对各个设计方案规范化处理后的数据序列R5,于是规范化处理后的二级决策指标矩阵为:

重复2.2.3~2.2.5的计算,得到二级灰色关联系数矩阵ξ和权重集W以后,可得二级综合评价模型:

R即为直角坐标机器人的总体性能对各个设计方案的综合评价值。综合评价值越大,说明该方案的总体性能越好。
3 应用举例
为了验证上述评价模型的有效性,本文以一台三坐标直角坐标机器人的设计为例,对其3种设计方案进行评价,表2所列为3种设计方案的指标初始值。

表2 直角坐标机器人总体设计方案评价指标参数
3.1 一级综合评价
3.1.1 控制性能B1评价
(1)B1的指标集为:B1={C1,C2,C3}。
(2)由表2得决策指标矩阵为:
(3)对决策矩阵进行规范化处理,则有:
(4)通过2.2.3节和2.2.4节的计算得出灰关联系数矩阵为:
(5)计算影响控制性能的各个技术指标的权重集W1=(0.332 0 0.195 6 0.472 4)。
(6)进行综合评价,则有:

得到各方案的控制性能B1的综合评价值。
3.1.2 评价第1层次指标B2、B3、B4
按照同样的步骤计算,各方案的运动性能B2的综合评价值为:

B3的综合评价值为:

各方案的抓取性能B4的综合评价值为:

3.2 二级综合评价
3.2.1 构建第1层次规范化后的决策指标矩阵
(1)对定性指标成本B5的决策指标序列进行规范化处理。在3个设计方案中成本的决策指标序列为:较低、一般、高。成本较低表示较好,成本高表示差。根据(6)式,其L-R型结果为:一般/较好=(0.625,0.625;0.325,0.541 7);差/较好=(0,0;0.125,0.5)。相应的整体期望值为:0.679 2、0.156 3。得到B5规范化处理后的决策序列为:R5=(1 0.679 2 0.156 3)。
(2)由(16)式,B1、B2、B3、B4、B55个指标的决策指标序列组成第1层次规范化后的决策指标矩阵,即

3.2.2 进行二级综合评价
按照2.3节步骤进行二级综合评价:
3.2.3 评价结果分析
二级评价的综合评价结果即为直角坐标机器人的总体性能对各个设计方案的评价值。由评价结果r3>r1>r2,可知在3个直角坐标机器人的设计方案中,以第3个方案为最优方案,其后分别为第1种设计方案和第2种设计方案。结果基本符合实际情况,因此该评价模型比较可靠,可以在工程实际中应用。
4 结束语
本文通过研究模糊综合评价方法和灰色评价方法,结合2种评价方法的优点,建立了直角坐标机器人设计方案的灰色模糊评价模型。将隶属度和灰色关联度同时运用到评价中,充分考虑诸多指标对系统整体的影响,使评价过程更为科学和全面。运用客观评价方法熵权法计算权重值,可以避免人为因素对权重确定的影响,减少了权重确定的随意性,从而使评价结果更为可靠。因此,本方法可以有效地用于对直角坐标机器人设计方案的评价。
[1]杜 栋,庞庆华.现代综合评价方法与案例精选[M].北京:清华大学出版社,2005:10-100.
[2]钟诗胜,王体春,丁 刚,等.大型水轮机设计方案多属性灰色模糊决策模型[J].计算机集成制造系统,2008,14(10):1905-1912.
[3]武志军,宁汝新,王爱民.可重构制造系统布局规划方案的灰色模糊综合评价方法[J].中国机械工程.2007,18(19):2313-2318.
[4]李 刚,周文宝.直角坐标机器人简述及其应用介绍[J].伺服控制.2008(9):72-75.
[5]楼锡银.基于灰色关联的机械总体设计方案模糊优选[J].农业工程学报,2010,26(6):135-140.
[6]邓聚龙.灰色预测与决策[M].武汉:华中理工大学出版社,1986.
[7]屈福政,费 烨,王 欣.复杂机械方案多属性灰色模糊优选模型及应用[J].大连理工大学学报,2005,45(2):201-205.
[8]文 军.基于熵权法的航空绩效评价研究[J].科学技术与工程,2009,22(9):6938-6941.
[9]李 磊,裴 凤.基于熵权和证据推理的多属性决策方案评价方法[J].合肥工业大学学报:自然科学版,2010,33(9):1396-1400.
