六相感应电机的无源性控制研究*
2012-08-28周海波
屈 鲁,谢 卫,岑 琪,周海波
(上海海事大学物流工程学院,上海 200135)
0 引言
六相感应电机调速系统由于具有低压器件实现大功率,转矩脉动减小,系统动、静特性提高,可靠性提高,转子谐波损耗减小等优势,使其在电动汽车、船舰推进、航空航天等领域的研究与实践日益增加[1]。由于感应电机是一种典型的非线性、多变量、强耦合的控制对象,所以对其进行高精度控制十分复杂。
感应电机的控制本质上是对一类非线性系统的控制。现在已经发展了许多非线性控制方法,例如状态反馈线性化、输入输出线性化、非线性反馈线性化等。但这些线性化方法仍存在许多问题:计算量大、需要精确的数学模型、需要进一步研究其稳定性、存在奇异点等情况。近年来,无源性控制得到了很大发展。研究结果表明,无源性控制是基于能量的观点,是一种全局定义而且全局稳定的控制方法,不存在奇异点,能够适用于电机低速甚至起动的情况,对参数的变化具有较强的鲁棒性,是一种本质上的非线性控制[2]。
1 六相感应电机的无源性
1.1 六相感应电机的E-L模型
六相感应电机的转子绕组仍为常见的笼型结构,定子绕组采用两组互差30°电角度的对称三相绕组构成的六相双Y型结构。若将笼型转子绕组也等效为类似的六相双Y型绕组,则六相感应电机的物理模型可用图1表示。
六相感应电机在三相静止坐标系ABC下的数学模型是一个高阶、非线性、强耦合的多变量系统,可以通过坐标变换对其进行降阶、化简,由此建立六相感应电机在两相同步旋转dq坐标系下的数学模型。在两相同步旋转dq坐标系下,双Y型六相感应电机的状态方程由一个八阶电气微分方程组和一个一阶机械微分方程表示[3],即

图1 六相感应电机的物理模型

式中:Rs、Rr、Ls、Lr——定、转子的电阻及电感;
Lm——互感;
p——微分算子;
ωdqs——dq坐标相对于定子A1相角转速;
ωdqr——dq坐标相对于转子a1相角转速;
J——转动惯量;
np——电机极对数;
ω——转子角速度;
TL——负载转矩;
Rm——阻尼系数。
利用式(1)、式(2)可得六相感应电机在两相同步旋转dq坐标系下的欧拉-拉格朗日(E-L)模型:

其中:


1.2 六相感应电机E-L模型的无源性
1.2.1 电气子系统的无源性
在忽略绕组电容效应的前提下,可以定义电机电气子系统的能量函数为V=iTLi,将其求导,并结合式(3)可得

不等式左边是电气系统能量的增量,右边是电源供给电机的能量。如果将u看作输入,i看作输出,则映射u→i为输出严格无源,即由E-L方程描述的六相感应电机的电气子系统是严格无源的。
1.2.2 机械子系统的无源性
假设电机轴是刚性的,即电机部分只储存动能,可以定义电机机械子系统的能量函数为Vm=ωTJω,将其求导,并结合式(2)可得

由于b为反对称矩阵,即b=-bT,所以iTbi=0,说明b对系统能量的平衡不起作用,称为无功力[4],对状态i的渐进稳定没有影响。从而有

对式(5)进行积分可得

对式(7)进行积分可得

不等式左边是机械子系统能量的增量,右边是机械子系统输入的能量。如果将(Te-TL)看作输入,ω看作输出,则映射(Te-TL)→ω为输出严格无源,即由E-L方程描述的六相感应电机机械子系统是严格无源的。
综上所述,六相感应电机的电气子系统和机械子系统分别是两个无源的子系统,则通过反馈互联构成的六相感应电机的模型仍是严格无源的[5],机械子系统视为电气子系统的“无源干扰”,其反馈互联模型如图2所示。

图2 六相感应电机的反馈互联无源模型
2 六相感应电机的无源性控制
无源性控制方法是一种非线性反馈控制方法,其基本思想是,在控制器的设计中,通过注入需要的阻尼项,适当配置系统的能量耗散方程中的“无功力”,使得闭环控制系统是无源的,从而使系统的输出误差渐近稳定于零点,即输出渐近跟踪设定值。
2.1 转矩控制器设计
设系统期望的输出转矩为T*e,期望的转子磁链为ψ*rd1、ψ*rd2,则在两相同步旋转dq坐标系下有

由式(9)可知,转矩控制器的设计,就是使系统转矩输出Te和磁链ψrd1、ψrd2渐进跟踪设定值。
为此定义误差矢量e=i-i*,其中i*为期望电流,由式(3)可得系统的误差方程为

其中:ε=u-[+(b+R)i*+γ],为扰动量。定义误差方程的能量函数为He=eTLe,其导数为

由于b为反对称矩阵,R是正定的,故若ε=0时有e<0,从而e渐进收敛到零,即Te→T*e。为使ε=0以保证控制系统的稳定性,同时获得期望的跟踪性能,可以通过选择适当的来实现,这一过程称为能量成形[4]。
根据感应电机按转子磁链定向的矢量控制思想,把转子磁链在d轴上的分量ψrd1、ψrd2渐进等于 ψ*rd1、ψ*rd2,在q轴上的分量 ψrq1、ψrq2渐进等于0,即


并由 ε(1)=ε(2)=ε(3)=ε(4)=0 ,则根据式(13)、式(14)可得六相感应电机无源性控制的规律为

由于按转子磁场定向时的转差率计算公式为

为了保证整个控制系统严格无源,改善系统动态响应,并降低控制系统对参数变化的灵敏度,在上述方程中增加阻尼项,得

根据Espinoza和Ortega的推导,阻尼系数可按式(17)选择[6]:

式中:0< λ <min{Rs,Rr}。
2.2 转速控制器设计
基于无源性的六相感应电机转矩控制,可渐进跟踪时变的转矩,只需要建立转速误差反馈,采用PI调节器,就可以得到如下参考转矩[4],即

式中,kp、ki分别为比例增益和积分增益。
3 仿真分析
在MATLAB/Simulink环境下,建立基于E-L模型的六相感应电机无源性控制仿真系统,主要包括基于E-L模型的六相感应电机模块,空间矢量脉宽调制的六相电压源型逆变器模块,转速控制器模块和转矩控制器模块。
其中,六相感应电机的额定数据如下:np=3,f1=50 Hz,Rs=0.22 Ω,Rr=0.47 Ω,Ls=0.039 5 H,Lr=0.039 5 H,Lm=0.036 4 H,J=0.116 N·m2。参考转速为斜坡函数,初始值为ω0=0.01 rad/s,斜率为3 140,稳定值为314 rad/s。负载转矩在0.6 s时突变,由TL0=0 N·m→TL1=100 N·m;在0.6 s时突变,由TL1=100 N·m→TL0=0 N·m。
对建立的控制系统模型进行动态仿真,仿真得到转速跟踪曲线、转矩跟踪曲线和相电流曲线,如图3~图6所示。

图3 转速跟踪曲线

图4 转矩跟踪曲线

图5 A1相电流曲线
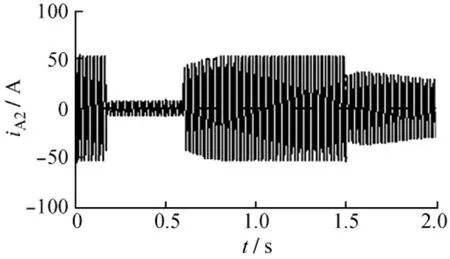
图6 A2相电流曲线
从仿真波形可知:电机的实际转速可以很好地跟踪目标转速;突加负载后,实际转速略有下降,随后很快恢复到目标转速;突卸负载后,实际转速略有上升,随后也很快恢复到目标转速。
4 结语
本文对六相感应电机无源性控制进行了研究,无源性控制无需完全抵消被控对象的非线性,而是通过适当配置系统的无功分量以使系统严格无源来保证系统的稳定性,并使系统渐近跟踪转速与转矩。在此基础上,设计了六相感应电机的转矩和转速控制器,并在Simulink中进行动态仿真。仿真结果证明了基于无源性控制的六相感应电机调试系统能很好地跟踪速度给定,具有较好的动、静态响应能力。
[1]庄朝晖,熊有伦,马挺.多相感应电机变频调速系统回顾、现状及展望[J].电气传动,2001(2):3-7.
[2]GOKDEREL U.Passivity-based methods for motors[J].Univ Pittsburgh,Control of Induction,1996.
[3]ZHAO Y,LI P T.Space vector PWM control of dual three-phase induction machine using vector space decomposition[J].IEEE Transactions on Industry Applica-tions,1995,31(5):1100-1109.
[4]王久和.交流电动机的非线性控制[M].北京:电子工业出版社,2009.
[5]韩京清,王伟.非线性跟踪-微分器[J].系统科学与数学,1994,14(2):177-183.
[6]NICKLASSON P,ORTEGA R,ESPINOSA-PEREZ G.Passivity based control of a class of blondel-park transformable electric machines[J].IEEE Trans on Automatic Control,1997,42(5):629-647.
