基于滑模变结构控制算法的无刷直流电机力矩平衡控制系统研究
2012-08-28黄元峰王海峰
黄元峰, 王海峰
(中国科学院电工研究所,北京 100190)
0 引言
由于无刷直流电机具有运行可靠、维护方便等特点,目前在许多领域都得到了广泛应用。在许多情况下,例如,电动汽车、船舶推进等领域,往往需要多台电机同时工作,并且要求各电机的输出转矩平衡[1]。
在文献[3]中,利用PI控制算法实现了2台无刷直流电机的力矩平衡控制,由于PI控制本质上是一种线性控制,而无刷直流电机是非线性系统,因此其试验结果中的2台电机输出转矩有比较大的超调,而且无法实现完全一致。
滑模变结构控制是一类非线性控制,它能在动态过程中根据系统当前的状态变换有目的的不断变化,迫使系统按照预定的状态轨迹运行。研究表明[2]:滑模变结构控制具有快速响应、无需在线辨识等优点,因此滑模变结构控制很适合无刷直流电机的力矩平衡控制。
本文将滑模变结构控制算法应用到2台无刷直流电机力矩平衡控制系统中,减小了电机力矩输出超调,提高了2台无刷直流电机的力矩平衡控制精度,达到了很好的控制效果。
1 系统描述

式中:e——电枢反电势;
La——相绕组电感;
Ra——电枢电阻;
ku——电动势常数;
无刷直流电机的动态平衡方程为
ω——转子角速度。
力矩平衡方程为

式中:Tem——电磁转矩;
Tl——负载转矩;
B——阻尼系数;
J——转动惯量;
kt——转矩系数。
由以上等式可得

取x1=ia,x2=ω,则有状态方程:

对式(4)进行拉普拉斯变换,且假设ia(0)=0,ω(0)=0,可得到如下方程式:

由式(6)可得到无刷直流电机的动态结构框图,如图1所示。

图1 无刷直流电机的动态结构框图
2 滑模变结构控制器的设计
2.1 选择切换函数S
本系统要实现的是两台电机的输出转矩平衡,根据式(3)可得,输出转矩与电枢电流之间只是相差一个转矩系数kt,因此实际上可通过控制两台电机的电枢电流一致来达到输出转矩平衡的
且ε>0,k>0,所以有s˙s<0,即所选趋近律满足到达条件。
2.2 控制系统的稳定性分析
通过Lyapunov稳定性理论来对设计的控制系统进行稳定性分析。选取Lyapunov函数:目的。定义电枢电流误差为


其中,iaref为被跟踪电机(电机A)的电枢电流,同时也是被控电机(电机B)的参考电流。这里,开关函数取为

不难看出,系统达到稳定时满足s=0,即2台电机达到输出转矩平衡。选取指数趋近律:
则有:

故整个系统在Lyapunov意义下渐进稳定。
2.3 计算控制律
根据式(5)和式(8),有

整理得

3 仿真及试验结果
实际仿真中所选用的无刷直流电机的参数如下:Ra=0.83 Ω,La=0.003 H,J=0.009 kg·m2,B=0.08,kt=ku=0.554。选取控制器参数值如下:ε=50,k=1 800,c=1。
将各参数代入以上各表达式中,在MATLAB中利用Simulink模块进行数学建模仿真。
双电机控制框图如图2所示。
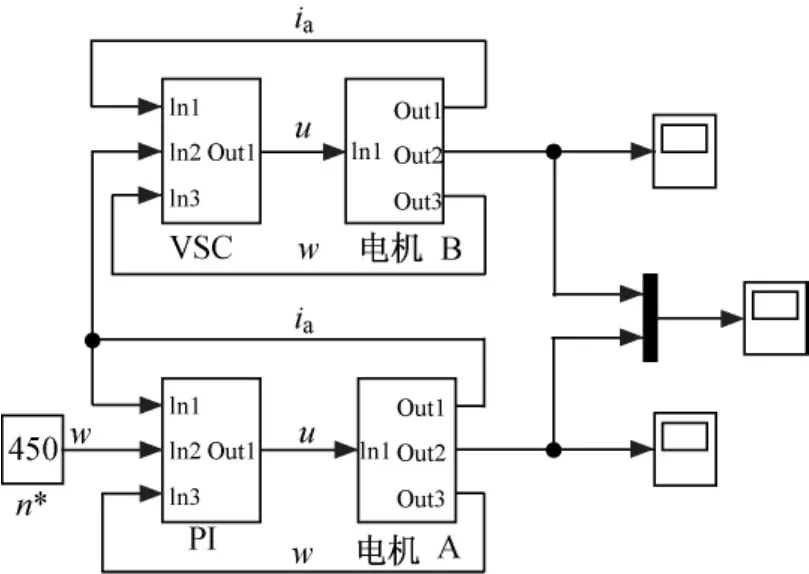
图2 双电机控制框图
其中,目标电机A的控制采用的是经典的双闭环PI控制[3],而被控电机B与目标电机A的力矩平衡控制采用的是滑模变结构控制算法。通过仿真运行,得到仿真曲线如图3、图4所示。从图3可看出,采用滑模变结构控制的电机B可以很好的与目标电机A保持输出转矩的一致;突加负载时,滑模变结构控制与PI控制相比,有效减小了电机输出转矩的超调。
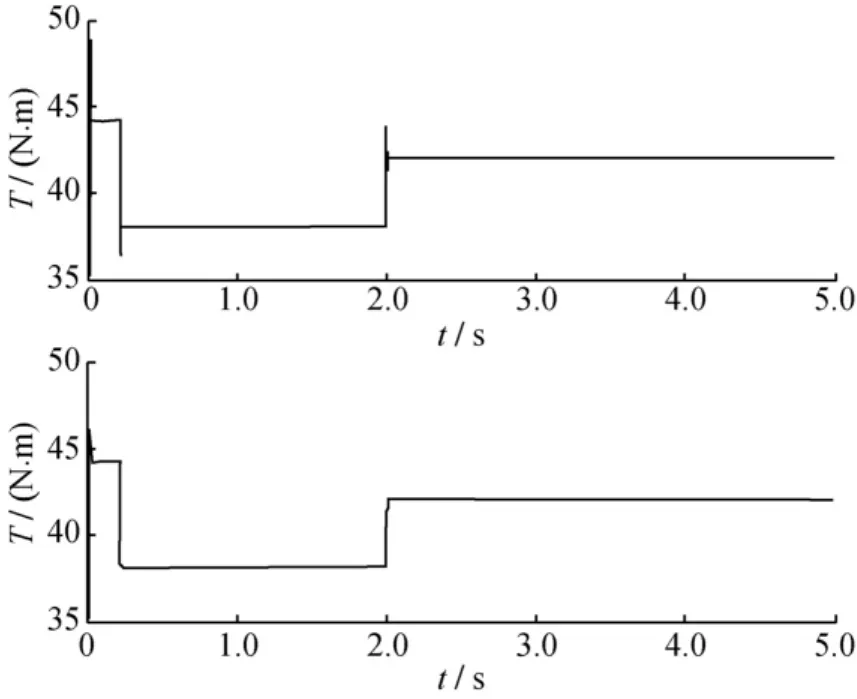
图3 双电机的输出转矩曲线
图4(a)是传统 PI控制下的试验仿真结果[3],图4(b)是滑模变结构控制下的仿真结果。通过比较可看出,与PI控制相比,滑模变结构控制不但降低了超调,而且实现了无误差跟踪。

图4 不同控制算法下的双电机输出转矩曲线
4 结语
本文首先分析了使用PI控制实现双电机力矩平衡控制所存在的不足,设计了滑模变结构控制,进行了稳定性分析,并成功的将滑模变结构控制算法应用到双电机的力矩平衡控制中。最后通过仿真结果的比较分析,突出了该控制策略的诸多优点,得到了理想的跟踪控制效果。
[1]童玲.基于DSP的交流电机双闭环控制系统设计[J]. 现代机械,2008,10(5):47-49.
[2]林立,唐旭,张续义,等.基于DSP的PWM双闭环直流调速系统[J]. 微电机,2007,40(4):51-55.
[2]ZHEN Y,WANG H F,YANG J,et al.Research on torque balance of permanent-magnet brushless DC motor[C]∥ Proceedings of ICEMS,2007:786-788.
