空空雷达主动弹的告警探测技术研究
2012-08-27李小龙程嗣怡
李小龙, 王 星, 程嗣怡, 郑 坤
(1.空军工程大学航空航天工程学院,西安 710038; 2.中国人民解放军95214部队,长沙 410111;3.电子信息控制重点实验室,成都 610036)
0 引言
随着各作战飞机性能的改进和作战理论的发展,未来空战将呈现出全高度、全方位、全频谱、大纵深、强干扰、立体化等特点。具有“三全”攻击能力的空空雷达主动弹将在夺取主动权方面发挥越来越重要的作用。
面对超视距空空导弹的出现,如何有效保护本方飞机,遂行战斗任务,在很大程度上取决于电子对抗技术钳制敌方武器的能力。
对抗空空雷达主动制导导弹,必须首先发现导弹,这是采取各种后续抗导弹措施的前提[1]。随着电子战系统概念的发展,单纯的威胁告警已被战场态势感知、一体化多功能综合系统所代替,因而,增加无源探测手段,进行静寂探测是未来发展的方向。
1 技术可行性分析
现有的告警系统大都处于威胁告警阶段,为了能及时消灭威胁源,未来的告警装置除了能准确判明威胁源的种类外,还必须对其定位,直接向武器系统提供数据,实现隐身打击或拦截能力[2]。目前,防空反导已成为现代防空作战的重要作战样式,同样,机载反导也将成为重要的发展方向,机载反导武器将具有摧毁空空导弹的能力,世界上已经有多种型号的空空导弹在作战试验过程中成功地拦截了反舰导弹[3],俄制新型R-77空空导弹甚至具有攻击AIM-54“不死鸟”和AIM-120的能力。机载激光武器的发展和应用,也将具有较强的反导能力。
机载反导技术的发展,将促使导弹告警探测技术的更新,即新一代的告警设备不仅将成为综合电子战的一部分,而且需要在整个航电系统中发挥作用[4],其作用不仅限于对有威胁辐射源的告警,而且可以为火控系统提供目标识别,减少机载雷达的使用时间,甚至可以直接提供武器发射所需的火控数据,完成类似反辐射导弹一样的导弹拦截任务。一旦遭敌导弹攻击,机上无源探测接收机和导弹发射探测器将对威胁做出判断,对于已构成威胁的导引头,可在无源探测接收机的引导下或由反辐射导弹进行拦截,实现“电子+火力”综合作战能力。
多年来,反辐射攻击机一直利用机载雷达告警接收机完成单站无源定位、采用反辐射武器攻击地面雷达目标进行工作。随着信号处理技术的发展,无源定位技术的研究和应用越来越广泛,之前用于防御的无源检测系统,现在也可作为检测、跟踪甚至攻击目标的关键设备。与有源定位系统相比,无源定位可增强系统在电子战环境下的反侦察能力,其在导弹探测告警方面可与红外、紫外告警结合,也可弥补主动告警的不足。
在空空雷达主动制导导弹飞向目标的过程中,当弹目距离小于或等于主动雷达导引头的最大作用距离时,主动雷达导引头便自动打开,实现中末制导交班[5],转入“主动雷达末制导阶段”。在末制导段,由导引头发射电磁信号完成对目标信息的探测,因此,可以通过对导引头辐射信号的探测和快速处理得到导弹的参数信息,从而实现导弹的告警探测,在导弹中制导段,也可利用电视、调频广播、通信等外辐射源,对导弹实施无源探测。
2 模型建立
2.1 无源定位模型
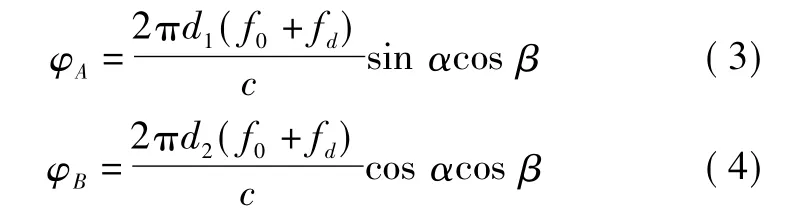
在现有的测向体制中,相位干涉仪测向是精度较高的一种测向技术,在电子对抗装备中获得广泛应用。它利用相位严格匹配的一对接收机测量同一辐射源的信号相位差和频率来获得到达角,从而计算出辐射源的准确方向[6]。为了避免360°相位模糊而造成测向模糊,实际的相位干涉仪测向通常采用多基线的相位干涉仪方法。基于相位差变化率的单站无源定位技术,是通过载机上的相位干涉仪接收目标辐射电磁波的相位差及其变化率信息对目标进行定位的,该技术在机载单站无源定位领域有着巨大的应用潜力,本文也采用此方法。原理如图1所示。
其中:OA、OB为相互正交的一对干涉仪天线;α、β分别为导弹相对载机坐标系的方位角和俯仰角;r为径向距离。
为了适应导弹的机动变化,这里采用交互式多模型。在交互式多模型算法中,设导弹有l种运动状态,对应l种运动模型,对多模型滤波估计,第i个模型表示为[7]


图1 定位原理Fig.1 Principle of locating
设导弹和机载探测器的相对位置为(xk,yk,zk),速度为(vxk,vyk,vzk),加速度为(axk,ayk,azk),扰动噪声为(wxk,wyk,wzk)。本文采用匀加速运动模型和Singer运动模型的组合。
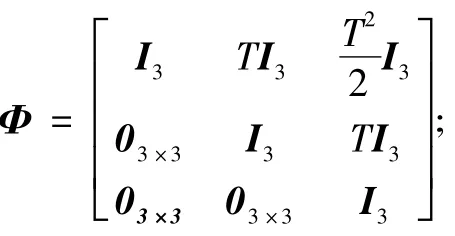

各模型之间在不同时刻按照状态转移概率矩阵已知的齐次马尔科夫链进行切换,转移概率可以表示为πij=P{m(k)=mj|m(k-1)=mi}。
2.2 基于无源定位的导弹告警检测
定位跟踪法作为定位跟踪系统的一个核心问题,一直以来都是研究的重点[9]。对于空空雷达主动弹,典型的观测参数包括方向角、到达时间、频率、频率变化率、相位差变化率,利用其中的某个观测量或者联合利用多个观测量,就形成了各种不同的定位跟踪法。
2.2.1 量测方程
相位差变化率为

多普勒频率变化率

2.2.2 滤波算法
1)模型条件初始化和重新初始化。
预测模型概率为

多普勒频率为
混合权重为

混合估计为

混合协方差为

2)模型条件滤波。
测量变换预测
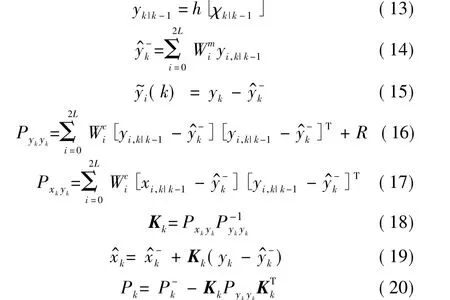
3)模型概率更新。
模型似然

模型概率

4)估计融合。
总体估计

总体协方差

整个流程如图2所示。
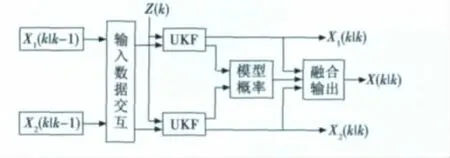
图2 算法流程图Fig.2 Flow chart of algorithm
3 仿真结果与分析
导引头信号频率为10 GHz,α 为0.01,β 为 2,k为-3,σw为 5,amax为 320 m/s2,Pmax为 0.05,P0为 0.5。导弹第一阶段做匀加速运动,第二阶段做变加速转弯运动,最后做变减速转弯匀速运动。定义相对径向距离误差为Δr=dr/r,其中:dr为定位误差;r为真实径向距离,仿真结果如图3~图4所示。
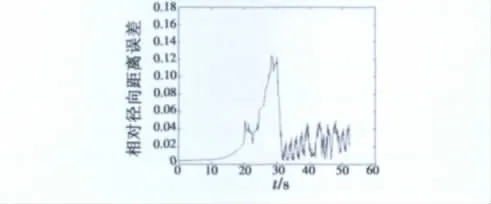
图3 径向距离误差Fig.3 Radial distance error
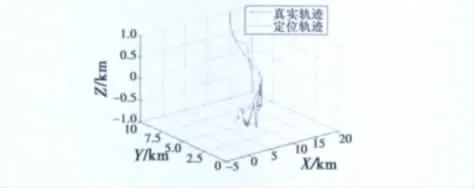
图4 跟踪定位曲线Fig.4 The tracking and locating curve
从仿真结果可以看出,采用交互式多模算法和UKF滤波算法,在导弹出现机动时,误差有一定的增加,但是在较短的时间内能够实现收敛,其误差稳定在4%左右,具有较高的跟踪精度。该算法既解决了传统卡尔曼滤波线性误差大的缺点,又解决了模型单一、不精确带来的误差,因而取得了较好的效果。
当然,对于一般的中远程空空雷达主动弹,其前半球末制导距离通常为10~20 km,而后半球截获目标距离往往只有几千米,如果导弹距离太近,文中算法可能存在定位时间不够的问题。
改变导弹初始位置(单位为km)为(6,8,1),其他仿真条件不变,可得到跟踪定位结果如图5~图6所示。

图5 径向距离误差Fig.5 Radial distance error
从图5~图6可以看出,当导弹距离较近时,本文算法存在发散现象,因此,对于已经逼近的导弹,特别是从后半球攻击的导弹,单纯依靠无源定位技术难以保证定位跟踪精度。此时,应该依靠雷达、红外、紫外等告警信息,进行综合告警探测,才能达到较理想的效果。
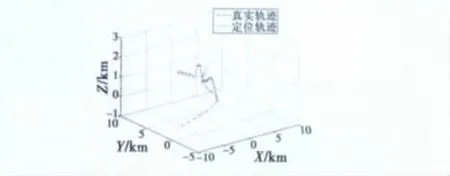
图6 跟踪定位曲线Fig.6 The tracking and locating curve
4 结论
本文对空空雷达主动弹的告警探测进行了可行性分析,引入无源引导的思想,采用基于干涉仪的机载无源定位技术进行导弹告警探测,仿真结果表明,该方法具有较高的精度。
[1] 于媛.机载火控雷达对空空导弹的检测研究[D].西安:空军工程大学工程学院,2009.
[2] 蒋耀庭,孙晓杰.美国导弹告警技术的发展[J].飞航导弹,2004(1):27-30.
[3] 江政杰,李一,黄海.新一代空空导弹的反导作战问题[J].四川兵工学报,2009,30(8):50-52.
[4] 李峥.机载雷达告警技术发展趋势[J].电子信息对抗技术,2008,23(3):51-54.
[5] 杨治琰.主动雷达制导型空空导弹的火控算法[J].航空电子技术,2001,32(1):8-14.
[6] 季晓光,高晓光.一种机载无源定位方法——干涉仪定位[J].火力与指挥控制,2008,33(11):158-161.
[7] 石章松,刘忠.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.
[8] 孙仲康,郭富成.单站无源定位跟踪技术[M].北京:国防工业出版社,2008.
[9] 郁亮.单站无源定位跟踪技术研究[D].成都:电子科技大学,2006.
[10] 周振,王更辰.机载单站对机动目标无源定位与跟踪[J].电光与控制,2008,15(3):60-63.
