带落角约束的滑模变结构制导律研究
2012-08-27张亚松任宏光吴彤薇
张亚松, 任宏光, 吴 震, 吴彤薇
(中国空空导弹研究院,河南洛阳 471009)
0 引言
在现代战争中,制导武器以其良好的作战效果越来越受到政府和军方的欢迎。如何提高武器的制导精度和最大限度地摧毁敌方目标,一直是研究的热点问题。但实际上,我们不仅希望有些武器攻击目标时获得最小脱靶量,还需要命中目标时刻具有一定的命中角度,以使战斗部发挥最大效能,取得最佳杀伤效果。例如希望反坦克导弹能够垂直命中前装甲,或者以较大落角命中薄弱的顶装甲获得最大穿深;希望钻地弹能以近乎90°的角度攻击地面[1]等。
20世纪90年代后,随着非线性控制理论的发展,逆系统控制、微分几何控制等方法为设计制导律提供了新的理论工具,但所设计出来的制导律都存在着形式复杂、需要信息多、鲁棒性差等缺点。针对上述问题,本文在基于变结构理论的基础上,设计了具有强鲁棒性的多约束条件下的滑模变结构制导律。
1 导弹目标相对运动模型
为了更好地说明滑模变结构制导律,需要建立弹目相对运动的二维平面模型。在建模过程中,我们做如下假设:
1)导弹和目标视为质点;
2)导弹和目标的速度大小保持不变,即为常数,并且导弹速度大于目标速度;
3)与整个制导回路的响应时间相比,自动驾驶仪和导引头的动态特性可忽略不计。
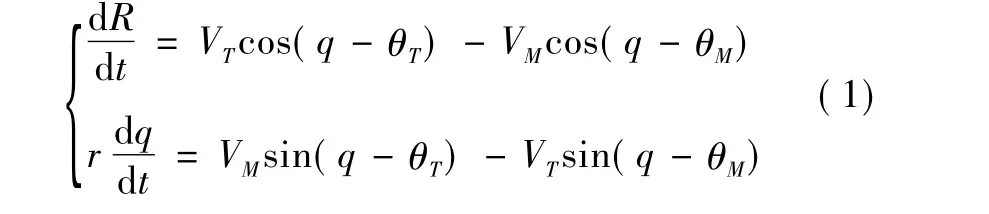
基于以上假设,导弹-目标的二维运动模型可以由以下一组方程[2]来描述:式中:R为导弹-目标的相对距离;q为导弹-目标的视线角;dq/dt为视线角速度;VM为导弹速度;VT为目标速度;θM和θT分别为导弹弹道倾角和目标航向角。
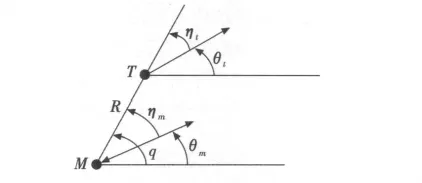
图1 弹目相对运动关系Fig.1 Relative motion relationship of missile and target
2 滑模变结构系统的设计[3]
滑模变结构控制作为一种鲁棒控制技术,已经广泛应用于机器人控制,大型航天器控制等领域,并且取得了良好的效果。滑模变结构控制设计可分为两个阶段。
第一阶段为能达阶段,即系统状态由任意初始状态位置向滑模运动,直到进入滑模。该阶段中S≠0,此时的设计任务是使系统能够在任意状态进入并到达滑动模态,保证超平面的吸引特性。
第二阶段为滑模运动阶段,即系统状态进入滑模并沿着滑模运动的阶段。在该阶段中S=0,此时的设计任务是保证S=0,并使得此时的等效运动具有期望的理想性能。
变结构系统的能达阶段和滑动阶段是相互独立的,因而变结构控制问题被简化为可以进行单独设计的两个过程。
1)设计合理的滑动模态超平面,确保滑动模态运动稳定并具有良好的动态品质。变结构控制系统对外界干扰、系统矩阵及控制矩阵参数摄动的不变性,只在滑动阶段才具备这一重要特性。因此,滑动模态代表着理想的系统动态特性和鲁棒性,选择合适的滑动模态是非常重要的。
2)设计滑模变结构控制律u使得系统实现滑动模态运动。假定系统以流形S=0上的点为目标域,若状态偏离切换流形S=0,则在不连续变结构控制律u的作用下,驱使系统状态到达切换流上。
3 滑模变结构制导律设计
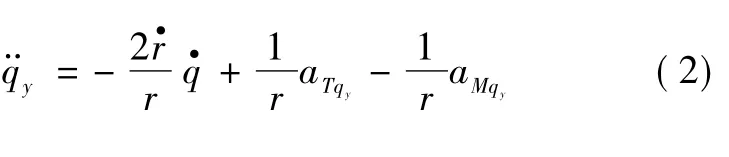
根据图1所示的相对运动关系得出的导弹与目标的相对运动方程,对式(1)进行相应的变换和整理可得到俯仰平面内基于视线角速率的相对运动方程[5]为式中:aTqy和aMqy分别为目标加速度和导弹加速度在视线法向上的分量。
为了同时获得零脱靶量和期望命中姿态角,根据经典制导武器末制导问题,易知视线角速率为零代表着理想状态时导弹最终命中目标,同时考虑到在末端满足的约束条件。因而令滑模的切换函数为

在滑动模态时,控制系统的性能将完全受到切换函数s的影响,为了改善系统运动点趋近切换面时的动态品质,采用如下的自适应可达律[4]

联立式(2)~式(4),得俯仰平面内滑模变结构制导律的一般表达式为

则滑模变结构制导律可简化为
依据滑模动态可达性,构造李雅普诺夫(Lyapunov)函数,显然这个函数是正定的。滑动模态sy=0吸引特性的充分条件是,即
可见,满足李雅普诺夫稳定判据。
4 数字仿真
为了验证所研究的制导律的有效性,更清楚地说明基于姿态角约束的滑模变结构制导律的性能优劣,在同一条件下引入优化的姿态角约束比例导引进行仿真比较。仿真初始条件为:导弹位置为(0 m,3000 m),目标位置为(6000 m,0 m),导弹初始速度为800 m/s,初始视线角 -arctan(3000/6000)*57.3,期望落角为 -75°。

图2 俯仰飞行弹道曲线Fig.2 The curve of pitch trajectory

图3 弹道倾角随时间变化曲线Fig.3 The changing of trajectory angle with time

图4 视线角随时间变化曲线Fig.4 The changing of LOS angle with time
通过对带落角约束的滑模变结构导引律和优化的比例导引律的仿真结果曲线的对比,可以看出运动轨迹曲线都比较平滑。但是,因滑模变结构导引律具有强姿态角约束能力,导弹在俯仰平面内运动轨迹的曲率较大,能有效达到期望的末端落角指标要求,而比例导引只是改善了落角情况。
5 结论
文章首先简单概述了滑模变结构控制系统的设计;然后,在基于变结构理论的基础上,推导了具有落角约束的滑模变结构制导律,并证明了其稳定性;最后,通过数学仿真比较结果表明,该制导律能够以期望的末端落角命中目标,满足性能指标要求。
[1] 左霖.巡航导弹对地精确攻击技术研究[D].南京:南京航空航天大学,2006.
[2] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2000.
[3] 高为炳.变结构控制理论基础[M].北京:中国科学技术出版社,1990.
[4] LEE J,MIN B M,MIN J T.Suboptimal guidance laws with terminal jerk constraint[C]//IEEE International conference on control,Automation and Systems,2007:1399-1403.
[5] 周荻.寻的导弹新型导引规律[M].北京:国防工业出版社,2002.
[6] 顾文锦,张汝川,于进勇.基于变结构控制理论的航向平面导引规律设计[J].海军航空工程学院学报,2006,24(2):50-53.
[7] 刘金琨.滑模变结构控制Matlab仿真[M].北京:清华大学出版社,2005.
[8] SONG Jianmei,ZHANG Tianqiao.Passive homing missile's variable structure proportional navigation with terminal angular constraint[J].Chinese Journal of Aeronautics,2001,14(2):83-87
[9] BYUNG S K,JANG G L.Homing guidance with terminal angular against non-maneuvering and maneuvering target[R].1997,AIAA-97-3474:189-199.
[10] 谷志勇,沈明辉,韩彦东.最优滑模变结构末制导律设计[J].弹箭与制导学报,2008(3):35-37.
[11] 孙未蒙,刘湘洪,郑志强.多约束条件下的制导律研究综述[J].飞行力学,2010(2):1-5.
[12] 李朝阳,郭军,李雪松.带有碰撞角约束的三维纯比例导引律研究[J].电光与控制,2009,16(5):9-12.