机载DEM特征点提取及压缩方法研究
2012-08-27赵鸿森周德云
赵鸿森, 冯 琦, 周德云
(西北工业大学电子信息学院,西安 710129)
0 引言
机载数字高程模型(Digital Elevation Model,DEM)数据信息量庞大[1],100 km2的3 m分辨率DEM数据就包含11亿个数据,以32位字节的浮点数表示其高程,将至少需要8.5 GB存储空间。另一方面,这些数据因为受到目前各种通讯网络带宽的限制,无法高效地进行网络传输。未来DEM数据要显示在手持终端(PDA)上,关键的一个问题就是DEM数据的压缩与解压算法的硬件实现。为了提高数据传输的效率,以及解决这一类海量数据的存储问题,必须进行DEM数据的压缩。研究数字高程模型数据的压缩技术有重要的意义。
机载DEM数据无损压缩可以采用普通的栅格数据压缩方式,如游程编码、块码等,但是由于DEM数据反映了地形的连续起伏变化,通常比较“破碎”,普通压缩方式难以达到很好的效果。因此对于网格DEM数据,可以采用哈夫曼编码进行无损压缩。有时,在牺牲细节信息的前提下,可以对网格DEM进行有损压缩,通常的压缩大都是基于离散余弦变换或小波变换的[1-2],由于小波变换具有能较好保持细节的特性,因此,将小波变换应用于DEM数据处理的研究较多。
已有压缩方法都没有充分考虑DEM数据不同于其他海量数据集的特点:地形的连续变化特征,鲜有高程的剧烈变化部分;几乎所有分块地形都由一些特征点或特征线确定,如山脊线、山谷线等,因此,压缩效率(比率)还有潜力可挖。提取DEM特征点(线),以这些点集作为样本集采用RBF神经网络来完成压缩,将存储的网格点高程转换为存储神经网络权值,可以进一步提高压缩比率。
1 原始DEM数据去噪
由于测量设备和传输介质等的不完善,DEM数据在其形成、传输记录过程中往往会引入多种噪声[3],噪声往往表现为或大或小的极值。滤波去噪,即在尽量保留地形细节特征的条件下对噪声进行抑制,其处理效果将直接影响到后续特征点提取的有效性。
噪点大部分是随机性的,它们对其他位置的点不会产生影响,和邻近各点相比,该点的某一坐标分量值将会有明显的不同。基于这一分析,可以用邻域平均的方法来判断每一点是否为噪声点,并用适当插值方法消除。在一个3×3的栅格窗口中,如Zi,j表示该点的高程值,直接利用中心格网高程值与8个邻域格网点的高程数值大小来进行判断,如表1所示。
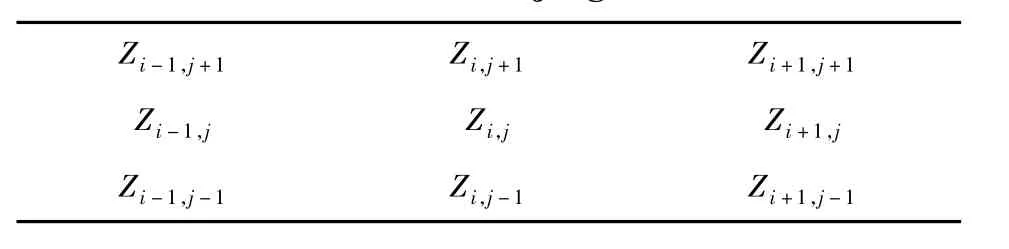
表1 噪点判断Table 1 Noise judgement

式(1)中,ε为门限值,它可以根据对误差允许范围的程度由用户设定选择合适的值。这种方法可以去除DEM数据中的噪点,起到滤波的作用,如图1、图2所示。

图1 含噪点的原始DEMFig.1 Original DEM
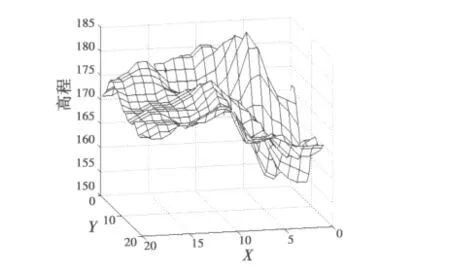
图2 去噪后DEMFig.2 DEM excluding noises
2 特征点提取
地形特征点主要包括山顶点(peak)、凹陷点(pit)、脊点(ridge)、谷点(channel)、鞍点(pass)、平地点(plane)等[4]。利用DEM提取地形特征点,可通过一个3×3或者更大的栅格窗口,利用中心网格点与领域8个点的高程关系来进行判断与获取。即在一个局部内,用X方向和Y方向上关于高程Z的二阶导数的正负组合关系来判断。
2.1 去噪后特征点的提取
判断矩阵形式DEM数据特征点的方法类似于噪点的判断,也是利用3×3的滑动窗口,具体方法为假设有一个 3 ×3 的窗口,如果(Zi,j-1- Zi,j)(Zi,j+1- Zi,j) >0,
1) 当 Zi,j+1> Zi,j则 VR(i,j)= - 1;
2) 当 Zi,j+1< Zi,j则 VR(i,j)=1;
如果(Zi-1,j- Zi,j)(Zi+1,j- Zi,j) < 0,
3) 当 Zi+1,j> Zi,j则 VR(i,j)=1;
4) 当 Zi+1,j< Zi,j则 VR(i,j)= - 1。
如果1)和4)或者2)和3)同时成立,则VR(i,j)=2,如果以上条件都不成立,则VR(i,j)=0。
其中:VR(i,j)= -1,表示谷点;VR(i,j)=1,表示脊点;VR(i,j)=2,表示鞍点;VR(i,j)=0,表示其他点。
这种判断特征点的方法利用了判断点Zi,j周围4个数据点,可以对山顶点、山谷点、鞍点做出判断。
2.2 山脊线和山谷线确定
在地貌特征描述中,山脊线和山谷线发挥着巨大作用,可以在提取特征点之前确定下来。
山顶点通常是在山脊线上,山谷点通常存在于山谷线上。DEM数据特征点的求取可以先求出山脊线和山谷线,然后进行局部判断,在山脊线上求出局部最大值为山顶点,在山谷线上求取局部最小值作为山谷点。
定义设:L为选择判断山脊线的段长;N为选择段长内数据个数;n为DEM数据间距。则N=L/n,取整数部分,N≥3。为了避免求取山脊线过程中无法求取次山脊线的情况,必须满足L≤d,其中,d表示相邻不相交山脊线之间的最小距离,也可根据经验取值。
设:Zi,j为 DEM 数据点的高程值;Di,j为山脊线上的点;Gi,j为山谷线上的点;i,j为该数据点的位置。获取d,取段长L=d,由N=L/n求取数据点最大个数N。第 i行上对选定段长数据 Zi,j到 Zi,j+N进行比较,设段内最大值为Zmax。
确定山脊线算法如下。
1) 若{|Zmax- Zi,j+h|≤ε|1≤h≤N,0≤ε},该段地形较平坦,不选取特征点。
2) 若存在唯一 Zmax且,则将Zmax保存为 Di,j,i,j表示 Zmax对应位置。
若 Zmax=Zi,j并且 Zmax> Zi,j-1,或者 Zmax=Zi,j+N并且Zmax>Zi,j+N+1,记录 Zmax;若出现区域最大值,即 Zmax=Zi,j+N1,0≤N1≤Δ,Δ 表示区域大小。无法判断段内最大值时,判断山脊线是否终止。
终止条件如下。
段内出现区域最大值,即 Zmax=Zi,j+N1,0≤N1≤Δ,Δ 表示区域大小判断 Zi+1,j+N1,0≤N1≤Δ:若 Zi+1,j+N1,0≤N1≤Δ 存在最大值 Z′max,Z′max坐标位置为 i′,j′,则Zmax的坐标选取为 I,j′;若 Zi+1,j+N1,0≤N1≤Δ 不存在最大值,继续判断 Zi+2,j+N1,0≤N1≤Δ,Zi+2,j+N1,0≤N1≤Δ存在最大值 Z′max,Z′max坐标位置为 i′,j′,则 Zmax的坐标选取为 i,j′;若 Zi+2,j+N1,0≤N1≤Δ 不存在最大值,则山脊线终止于Zmax。
3)在第i+1行继续进行以上工作,找出第i+1行Zmax,直到找出N行。
4)将记录的i~i+N个Zmax相互连接得到山脊线,若相邻两个最值的列坐标相差超过3则断开山脊线,进行山脊线延伸。
在山脊线上相邻3个数据中求出局部最大值Di,j。
山脊线延伸:若按行选取的最大值相邻两行之间两个最大值分别为 Zi,j,Zi+1,j,若 |j′- j|≥3,则山脊线在该行分为两条,在断开点山脊线不一定终止,需要在Zi,j和 Zi+1,j的领域内进行判断,在 i+1 行判断距 Zi+1,j最近的3个点数据,取最大值作为该条山脊线的下一节点,继续重复进行,直到相邻相距最近的3个点不存在最值终止,对于Zi+1,j则是向上进行领域判断,直到相邻相距最近的3个点不存在最值终止。
5)如果{Zi,j> Zi+1,j+h|0≤h≤N},Zi,j到 Zi,j+N可能为坡面上的点或者山脊点,这两种情况在行扫瞄中无法确定,要求出完整的山脊线还需要在垂直方向上进行以上4步的工作。
这样在设定的N×N的范围内就得到了山脊线、顶点,同样的方法也可以用来求取山谷线。图3为高程表上确定的山脊线,图4为50×50范围内选取的山脊线和山谷线点。

图3 DEM表上山脊线Fig.3 Ridge line on DEM

图4 50×50山脊线Fig.4 50 ×50 ridge line
3 径向基函数神经网络进行DEM数据压缩
3.1 模型建立
构建具有两个输入和一个输出的正则化RBF网络来实现从R2到R1的映射,从而完成DEM图像的压缩。网络的输入节点分别对应平面坐标x,y值,输出层节点对应高程H值。
3.2 隐层单元数的确定
DEM间距一般都是固定不变的,为了减少存储量,首先需要提取压缩范围内的特征点,对于特征点较少的区域,如果计算结果误差较大,可通过增大特征点选取过程中的阀值的方法增加特征点的个数,直至误差满足实际要求。即在特征点之间,特征点与区域边界之间增加新的特征点,新的特征点初值选为其对应位置的高程数据。
3.3 样本集的确定
RBF网络的优点[5]是收敛速度快、逼近精度高、训练结果唯一,缺点是泛化性能较差。所以当其输入偏离训练样本集时,系统表现出的鲁棒性就会很差。为提高网络泛化能力,在DEM表中等间距选取样本集。间距大小的确定与DEM的范围和精度有密切的关系,还要考虑地面计算设备性能。因此,对于较大范围的DEM数据,初始样本点不宜选得过多,先按照粗略的训练样本集进行训练,若不能满足总样本集的误差要求,则应当逐步减小采样间距以细化样本集,同时增加特征点个数;如果是确定山脊线和山谷线求取特征点,则需要减小段长以获得更多的特征点,基于DEM相关性获取特征点的方法则需要增大误差阀值,重新进行学习训练。
4 仿真算例
DEM数据取自ASTER GDEM,右上角为北纬25°东经95°的一分度经度×一分度纬度的实际DEM数据,按照30 m的间隔选取,总共有50×50个DEM数据。全局相对误差精度选为2%,实际地形如图5所示,样本点数量为1250,特征点个数为150,因此隐层单元数选为150,初值均取1。压缩后输出地形图如图6所示。

图5 实际地形图Fig.5 Actual DEM

图6 训练后网络输出地形Fig.6 Compressed DEM
为分析压缩效率,分别选取50×50、60×60和70×70依次进行仿真实验。
对比以上不同大小样本集的仿真实验,可看出随着样本集的扩大,数据最大的压缩比率也在显著增大,对于70×70大小的样本集,就可以达到20∶1的压缩比。
在实施大范围DEM压缩时,需要先通过分块策略对原始DEM进行区域分割[6],并建立分块与相应的RBF网络权值及隐层单元之间对应关系的检索表,然后在各子块中应用该压缩方法。

表2 各种大小的样本集的对比仿真结果Table 2 Comparison of emulational outcome
5 小结
充分考虑DEM数据自身特点,通过提取山脊线、山谷线等地貌特征,以这些地形特征点作为样本点训练集,从而具有根据地形自适应确定网络结构的特点。采用RBF神经网络进行DEM数据压缩,对于70×70大小的样本集,即可以达到20∶1的压缩比,并且随着样本点数目的增加压缩比逐渐增大,满足机载DEM压缩和解压要求。
[1] 罗永,成礼智,陈波,等.数字高程模型数据小波压缩算法[J].国防科技大学学报,2005,27(2):118-123.
[2] 刘爱利,闾国年.基于DCT域数字水印技术的DEM版权保护研究[J].地球信息科学,2008,10(2):214-223.
[3] DARNELL A R,TATE N J,BRUNSDON C.Improving user assessment of error implications in digital elevation models[J].Computers,Environment and Urban Systems,2008,32:268-277.
[4] 袁江红,欧建良,查正军.等值线DEM地形特征点提取与分类[J].现代测绘,2009,32(3):3-6.
[5] NAMPHOL A,CHIN S H,AROZULLAH M.Image compression with a hierarchical neural network[J].IEEE Transactions on Aerospace and Electronic Systems,2008,32(1):327-337.
[6] 施松新,叶修梓,张三元,等.基于分块的大规模地形实时渲染方法[J].浙江大学学报:工学版,2007,41(12):2002-2006.